

Radzevich, S.P. Monograph - 2001
.pdf1. Рабочие поверхности деталей и инструментов
80
и, если подставить эти выражения в (82), видно, что коэффициенты 1 и 2 могут быть определены через Eд и , Fд и и Gд и и их первые производные. Аналогичное справедливо и в отношении коэффициентов
1, 2 и 1, 2 .
Введем новые обозначения для коэффициентов 1 и 2 : обозначим их через 111 и 112 соответственно. Если подобным образом изменить обозначения для коэффициентов 1, 2 и 1, 2 , то придем к системе уравнений:
(1.83)
(1.84)
(1.85)
где коэффициенты ijk
|
2rд и |
1 |
|
|
rд и |
|
2 rд и |
|
|
|
||||||||||
|
|
11 |
|
|
|
|
11 |
|
|
|
Lд и n д и ; |
|
|
|||||||
|
Uд2 и |
Uд и |
Vд и |
|
|
|||||||||||||||
|
2rд и |
|
|
1 |
rд и |
|
2 |
rд и |
M |
д и |
n |
; |
||||||||
|
U |
V |
|
|
|
|||||||||||||||
|
|
12 U |
д и |
|
12 V |
|
д и |
|||||||||||||
|
|
д и |
д и |
|
|
|
|
|
|
|
|
|
д и |
|
|
|
||||
|
2rд и |
1 |
|
|
rд и |
|
2 rд и |
|
|
|
||||||||||
|
|
22 |
|
|
22 |
|
Nд и n д и , |
|
|
|||||||||||
|
V2 |
|
Uд и |
Vд и |
|
|
||||||||||||||
|
|
д и |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
i, j, k 1, 2 |
определены следующим образом: |
|
|
|
||||||||||||||||
|
|
|
|
Gд и |
|
dEд и |
|
|
2Fд и |
dFд и |
Fд и |
dEд и |
|
|||||||||||||||||||||||
|
|
|
|
dUд и |
|
|
|
|
dVд и |
|
|
|||||||||||||||||||||||||
1 |
|
|
|
|
|
|
|
|
|
|
|
|
dUд и |
|
|
|
|
|
; |
|||||||||||||||||
|
|
|
|
|
|
|
|
2 Eд и Gд и Fд2и |
|
|
|
|
|
|
|
|
||||||||||||||||||||
11 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||
|
|
|
|
|
|
|
|
Gд и |
dEд и |
|
Fд и |
|
dGд и |
|
|
|
|
|
|
|
|
|
|
|||||||||||||
1 |
1 |
|
|
dVд и |
dUд и |
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||
12 |
21 |
|
|
|
|
2 Eд и Gд и Fд2и |
|
|
; |
|
|
|
|
|
|
|
|
|||||||||||||||||||
|
|
|
|
2Gд и |
dFд и |
|
Gд и |
dGд и |
Fд и |
dGд и |
|
|
|
|||||||||||||||||||||||
1 |
|
dVд и |
|
|
|
|
|
; |
||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
dUд и |
|
|
|
|
|
|
dVд и |
|||||||||||||||||
|
|
|
|
|
|
|
2 Eд и Gд и Fд2и |
|
|
|
|
|
|
|
||||||||||||||||||||||
22 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||
|
|
2Eд и |
|
dFд и |
|
|
Eд и |
dEд и |
|
Fд и |
|
dEд и |
|
|||||||||||||||||||||||
2 |
|
dUд и |
|
|
|
dUд и |
; |
|||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
dVд и |
|
|
|
|
|
||||||||||||||||||||
|
|
|
|
|
|
|
2 Eд и Gд и Fд2и |
|
|
|
|
|
||||||||||||||||||||||||
11 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||
|
|
|
|
|
|
|
|
Eд и |
dGд и |
Fд и |
|
dEд и |
|
|
|
|
|
|
|
|
|
|
||||||||||||||
2 |
2 |
|
|
dUд и |
|
dVд и |
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||
12 |
21 |
|
|
|
|
2 Eд и Gд и Fд2и |
|
; |
|
|
|
|
|
|
|
|
||||||||||||||||||||
|
|
|
|
E |
|
|
dGд и |
2F |
|
|
|
dFд и |
|
F |
|
|
|
|
dGд и |
|
||||||||||||||||
|
|
|
|
д и |
|
|
|
|
|
|
|
|
д и |
|
|
|
|
|
|
|
||||||||||||||||
2 |
|
|
|
|
|
dVд и |
|
|
д и |
dVд и |
|
dUд и |
|
|
|
|
|
|||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
. |
|||||||||||||||||||
|
|
|
|
|
|
|
2 Eд и Gд и Fд2и |
|
|
|
|
|||||||||||||||||||||||||
22 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||
1.2. Задание рабочих поверхностей деталей и инструментов.
Расчет элементов их локальной геометрии |
|
81 |
|
|
|
В уравнениях (83)-(85) неизвестными остаются гауссовы коэффициенты Lд и , |
Mд и и |
Nд и второй |
основной квадратичной формы Φ2.д и поверхности Д И . |
|
|
Коэффициенты ijk называют символами Кристоффеля. Здесь удобно ввести в рассмотрение не только символы ijk , но и символы kji , определив их как ijk kji , (поскольку 211 121 и 212 122 ).
Выражения ij, k называют символами Кристоффеля первого рода; в этом случае коэффициенты ijk называют символами Кристоффеля второго рода. Они зависят только от коэффициентов Eд и , Fд и и Gд и первой основной квадратичной формы Φ1.д и и их первых производных по параметрам Uд и и Vд и .
Уравнения Гаусса (83)-(85) полезно дополнить двумя уравнениями, которые выражают производные
dn д и |
и |
dn д и |
через их проекции на оси подвижного трехгранника. Поскольку |
dn д и |
и |
dn д и |
лежат в |
|
dUд и |
dVд и |
dUд и |
dVд и |
|||||
|
|
|
|
касательной плоскости, выражения для их расчета могут быть представлены в таком виде:
dn д и |
p |
drд и |
p |
|
drд и |
; |
dn д и |
q |
drд и |
q |
|
drд и |
. |
dUд и |
|
2 dVд и |
dVд и |
|
|
||||||||
1 dUд и |
|
|
1 dUд и |
|
2 dVд и |
||||||||
Вновь используя соотношения (25) для гауссовых коэффициентов Eд и , Fд и , Gд и первой основной квадратичной формы Φ1.д и и уравнение (23), получаем:
Lд и p1Eд и p2 Fд и ; |
Mд и q1Eд и q2 Fд и ; |
Mд и p1Fд и p2Gд и ; |
Nд и q1Fд и q2Gд и , |
или
dn д и Fд и Mд и Gд и Lд и dUд и Eд и Gд и Fд2и
dn д и Fд и Nд и Gд и Mд и dVд и Eд и Gд и Fд2и
drд и Fд и Lд и Eд и Mд и dUд и Eд и Gд и Fд2и
drд и Fд и Mд и Eд и Nд и dUд и Eд и Gд и Fд2и
drд и ;
dVд и
drд и .
dVд и
Эти уравнения называют уравнениями Вейнгартена.
Зная уравнения (77) и (78) касательных к поверхности Д И , находим уравнение нормали
(1.86)
(1.87)
n д и к ней,
производные |
dn д и |
и |
dn д и |
по параметрам Uд и и Vд и , а также величину угла д и между касательны- |
|||||
dUд и |
dVд и |
||||||||
|
|
|
|
|
|
|
|||
ми. Это дает возможность дополнить систему из двух уравнений (86) и (87) третьим уравнением |
|
||||||||
|
|
|
|
cos д и |
|
Fд и |
(1.88) |
||
|
|
|
|
|
|
|
|||
|
|
|
|
Eд и Gд и |
|||||
|
|
|
|
|
|
|
|||
и таким путем получить полностью определенную систему из трех уравнений (87)-(88) для нахождения трех искомых коэффициентов Lд и , Mд и и Nд и .
Вернемся к рассмотрению вопроса о нахождении производных для функций, заданных дискретно.
Дифференцирование таблично заданной функции z z x (рис. 1.17) производится по формулам:
82 |
|
|
|
|
|
|
|
|
1. Рабочие поверхности деталей и инструментов |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Z X0 |
ph 3 |
1 |
p 0,5 Z 1 2 pZ0 |
p 0,5 Z 1 ; |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
h |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Z X0 |
ph 4 |
|
1 |
|
3 p |
2 6 p 2 |
Z 1 |
|
3 p2 4 p 1 |
Z0 |
|
3 p2 2 p 2 |
Z 1 |
|
3 p2 |
1 |
Z 2 |
|
|
|
|
||||||||||||||
|
|
|
|
|
|
|
6 |
|
|
2 |
|
|
|
|
2 |
|
|
|
|
|
6 |
|
|
; |
|
|
|||||||||||
|
|
|
|
|
|
|
h |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Z X0 |
ph 5 |
|
1 |
2 p3 3 p2 p 1 |
Z 2 |
4 p3 |
3 p2 8 p 4 |
|
|
2 p |
3 5 p |
Z0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
h |
|
12 |
|
|
|
|
|
6 |
Z 1 |
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
(1.89) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
4 p |
3 |
3 p |
2 |
8 p |
4 Z |
|
|
|
2 p |
3 |
|
3 p |
2 |
p |
1 Z |
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
2 |
. |
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
6 |
|
|
|
|
|
|
|
|
12 |
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
В этих формулах p X X0 |
и X X0 ph . |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
h |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
X |
|
|
|
Z |
|
|
|
|
|
|
|
|
|
|
|
|
X |
|
|
|
|
|
|
|
|
|
|
|
X |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
X |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Y |
|
|
|
Y |
|
|
|
|
|
|
|
|
|
Y |
|
|
|
|
|
|
|
|
|
|
Y |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1. |
|
|
|
|
|
|
|
2. |
|
|
|
|
|
|
|
3. |
|
|
|
|
|
|
|
|
|
4. |
|
|
|
|
|
|||
Рис. 1.17. Касательные прямые и дифференцирование поверхностей, заданных числовыми отметками. |
|
||||||||||||||||||||||||||||||||||||
Пример 1.4. Найти производную Z X в точке X 0,51 функции Z X , заданной при X0 0,5 и h 0,02 пятью значениями:
Z 2 0,35889029 , Z 1 0,35553253 , Z0 0,35206533 , Z 1 0,34849251 и Z 2 0,344818 . Подставив приведенные исходные данные в
(89), получим: Z 0,51 0,1786491875 .
X
Для определения производных используются соответствующие зависимости, а именно:
Z |
|
Z 1 Z 1 |
; |
2 Z |
|
Z 1 2Z0 Z 1 |
X |
|
X 2 |
h2 |
|||
|
2h |
|
||||
– когда число узлов равно трем;
|
|
Z |
|
Z 2 8Z 1 8Z 1 Z 2 |
; |
|
|
|
|
X |
|
|
|||
|
|
|
12h |
|
|||
2 Z |
|
Z 2 16Z 1 30Z0 16Z 1 Z 2 |
; |
||||
X2 |
|
||||||
|
|
|
|
12h2 |
|
||
1.2. Задание рабочих поверхностей деталей и инструментов.
Расчет элементов их локальной геометрии |
83 |
|||
|
|
|
|
|
|
3Z |
|
Z 2 2Z 1 2Z 1 Z 2 |
; |
|
X3 |
2h3 |
||
|
|
|
||
– когда число узлов равно пяти и
Z Z 3 9Z 2 45Z 1 45Z 1 9Z 2 Z 3
60h
Z 2Z 3 27Z 2 270Z 1 490Z0 270Z 1 27Z 2 2Z 3 ; 180h2
Z Z 3 8Z 2 13Z 1 13Z 1 8Z 2 Z 3
8h3
– когда число узлов равно семи.
Формулы для нахождения производных в узлах Z X существенно проще приведенных выше, так как в узлах P X принимает фиксированные значения. Особенно простыми являются формулы для центрального узла P X 0 . Эти формулы удобны для дифференцирования таблично заданных функций в точке X X0 .
Частные производные функции ряда переменных Z X1, X2 , , Xn вычисляются по приведенным выше
формулам, если задавать приращение одной из переменных и оставлять неизменными (равными заданным значениям) остальные переменные.
Для полного решения задачи нахождения производных дополнительно производится анализ чувствительности функции Z X1, X2 , , Xn к изменению ее параметров X1, X2 , , Xn .
Один из простейших способов нахождения смешанных производных уравнения r д и r д и U д и ,Vд и
состоит в следующем.
Уравнение поверхности Д И рассматривается первоначально в неявной форме:
AX 2 BY2 C Z 2 D XY E XZ F YZ G X H Y L Z M 0 ,
после чего его преобразуют к виду:
|
|
|
|
|
|
|
|
|
X |
2 |
|
|
B |
Y |
2 |
|
C |
Z |
2 |
|
D |
|
XY |
E |
|
XZ |
|
F |
YZ |
G |
X |
|
H |
Y |
|
L |
Z |
M |
|
0 |
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
A |
|
|
|
A |
|
A |
A |
|
A |
|
A |
|
A |
|
A |
A |
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||
и записывают в исходной форме: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
X |
2 a Y2 a |
2 |
Z 2 |
a |
3 |
XY a |
4 |
XZ a |
5 |
YZ a |
6 |
X a |
7 |
Y a |
8 |
Z a |
9 |
0 . |
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
|
В окрестности точки |
|
M0,0 |
|
|
(рис. 1.18) на поверхности |
Д И |
рассматриваем ближайшие к ней точки |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
Mi, j |
(здесь i 1, 0, 1 и |
|
j 1, 0, 1 ), координаты которых известны (заданы или могут быть расчитаны). |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
Координаты этих точек Mi, j |
|
подставляем в исходное уравнение и таким путем приходим к системе из |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
X |
2 |
|
a Y2 |
|
a |
2 |
Z |
2 |
|
|
|
|
a |
3 |
X |
|
|
|
|
|
Y |
|
|
|
a |
4 |
X |
1, 1 |
Z |
1, 1 |
a |
|
Y |
|
|
Z |
1, 1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||
|
1, 1 |
1 |
1, 1 |
|
|
|
|
|
1, 1 |
|
|
|
|
|
|
1, 1 |
1, 1 |
|
|
|
|
|
|
|
5 |
|
1, 1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
a6 X 1, 1 a7Y 1, 1 a8 Z 1, 1 a9 0; |
||||||||||||||||||||||||
X |
2 |
a Y |
2 |
a |
2 |
Z |
2 |
|
|
|
a |
3 |
X |
1,0 |
Y |
|
|
a |
4 |
X |
1,0 |
Z |
1,0 |
a |
5 |
Y |
|
Z |
1,0 |
a |
6 |
X |
1,0 |
a |
7 |
Y |
|
|
a |
8 |
Z |
1,0 |
a |
9 |
0; |
|||||||||||||||||||||||||||||||||||||
|
1,0 |
|
1 1,0 |
|
|
|
|
1,0 |
|
|
|
|
|
|
|
|
|
1,0 |
|
|
|
|
|
|
|
|
|
1,0 |
|
|
|
|
|
|
|
|
|
|
|
|
1,0 |
|
|
|
|
|||||||||||||||||||||||||||||||||||||
1. Рабочие поверхности деталей и инструментов
84 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
X |
2 |
|
a Y2 |
|
|
a |
2 |
Z |
2 |
|
|
|
a |
3 |
X |
|
Y |
|
|
|
|
a |
4 |
X |
1, 1 |
Z |
1, 1 |
a |
5 |
Y |
|
|
Z |
1, 1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||
|
1, 1 |
|
1 |
1, 1 |
|
|
|
|
|
|
1, 1 |
|
|
|
|
|
1, 1 |
1, 1 |
|
|
|
|
|
|
|
|
|
|
|
1, 1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
a6 X 1, 1 a7Y 1, 1 a8 Z 1, 1 a9 0; |
||||||||||||||||||||||||||||
X |
2 |
a Y |
2 |
|
a |
2 |
Z |
2 |
|
|
a |
3 |
X |
|
|
Y |
|
a |
4 |
X |
0, 1 |
Z |
0, 1 |
a |
|
Y |
|
|
|
Z |
0, 1 |
a |
6 |
X |
0, 1 |
a |
|
Y |
|
a |
8 |
Z |
0, 1 |
a |
9 |
0; |
||||||||||||||||||||||||||||||||||||||||||
|
0, 1 |
|
1 0, 1 |
|
|
|
|
|
0, 1 |
|
|
|
|
|
|
|
0, 1 0, 1 |
|
|
|
|
|
|
|
|
|
|
|
5 0, 1 |
|
|
|
|
|
|
|
|
|
|
|
|
7 0, 1 |
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||||||||
X |
2 a Y2 |
|
a |
2 |
Z |
2 |
|
a |
3 |
X |
0,0 |
Y |
|
a |
4 |
X |
0,0 |
Z |
0,0 |
|
a |
5 |
Y Z |
0,0 |
a |
6 |
X |
0,0 |
a |
7 |
Y a |
8 |
Z |
0,0 |
a |
9 |
0; |
|
|
|
|
|
||||||||||||||||||||||||||||||||||||||||||||||
|
0,0 |
|
1 |
0,0 |
|
|
|
|
0,0 |
|
|
|
|
|
|
|
|
0,0 |
|
|
|
|
|
|
|
|
|
0,0 |
|
|
|
|
|
|
|
|
|
|
|
0,0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||
X |
2 |
a Y |
2 |
|
a |
2 |
Z |
2 |
|
|
a |
3 |
X |
|
|
Y |
|
a |
4 |
X |
0, 1 |
Z |
0, 1 |
a |
|
Y |
|
|
|
Z |
0, 1 |
a |
6 |
X |
0, 1 |
a |
|
Y |
|
a |
8 |
Z |
0, 1 |
a |
9 |
0; |
||||||||||||||||||||||||||||||||||||||||||
|
0, 1 |
|
1 0, 1 |
|
|
|
|
|
0, 1 |
|
|
|
|
|
|
|
0, 1 0, 1 |
|
|
|
|
|
|
|
|
|
|
|
5 0, 1 |
|
|
|
|
|
|
|
|
|
|
|
|
7 0, 1 |
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||||||||
X |
2 |
|
a Y2 |
|
a |
2 |
Z |
2 |
|
|
|
a |
3 |
X |
|
Y |
|
|
|
a |
4 |
X |
1, 1 |
Z |
1, 1 |
a |
5 |
Y |
|
|
|
Z |
1, 1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||
|
1, 1 |
|
1 |
1, 1 |
|
|
|
|
|
|
1, 1 |
|
|
|
|
|
1, 1 |
1, 1 |
|
|
|
|
|
|
|
|
|
|
|
1, 1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
a6 X 1, 1 a7Y 1, 1 a8 Z 1, 1 a9 0; |
||||||||||||||||||||||||||||
X |
2 |
a Y2 |
|
a |
2 |
Z |
2 |
|
|
a |
3 |
X |
|
|
|
Y |
|
a |
4 |
X |
1,0 |
Z |
1,0 |
a |
Y |
|
Z |
1,0 |
a |
6 |
X |
1,0 |
a |
|
Y |
|
a |
8 |
Z |
1,0 |
a |
9 |
0; |
|||||||||||||||||||||||||||||||||||||||||||||
|
1,0 |
|
1 1,0 |
|
|
|
|
|
1,0 |
|
|
|
|
|
1,0 |
1,0 |
|
|
|
|
|
|
|
|
|
5 1,0 |
|
|
|
|
|
|
|
|
|
|
|
|
7 |
|
1,0 |
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||||||||
X |
2 |
|
a Y2 |
|
a |
2 |
Z |
2 |
|
|
|
a |
3 |
X |
|
Y |
|
|
|
a |
4 |
X |
1, 1 |
Z |
1, 1 |
a |
5 |
Y |
|
1 |
Z |
1, 1 |
a |
6 |
X |
1, 1 |
a |
7 |
Y |
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||||||||||||
|
1, 1 |
|
1 |
1, 1 |
|
|
|
|
|
|
1, 1 |
|
|
|
|
|
1, 1 |
1, 1 |
|
|
|
|
|
|
|
|
|
|
|
1, |
|
|
|
|
|
|
|
|
|
|
1, 1 |
|
|
|
|
|
||||||||||||||||||||||||||||||||||||||||||
a8 Z 1, 1 a9 0
девяти линейных уравнений для нахождения девяти неизвестных коэффициентов a1 , a2 , …, a9 .
|
|
M 1,0 |
|
|
|
|
Найденные путем решения этой системы |
||||||||||||
|
M 1, 1 |
M 1, 1 |
|
|
коэффициенты a1 , a2 , …, a9 |
подставляются в |
|||||||||||||
|
|
|
|
|
|
исходное уравнение, которое затем пребразуется |
|||||||||||||
|
|
M0, 1 |
M0,0 |
|
|
(для этого используются методы, рассмотренные |
|||||||||||||
|
|
M0, 1 |
|
ниже, в гл. 3) к виду r д и r д и U д и ,Vд и . |
|
||||||||||||||
|
|
|
|
Д И |
|
||||||||||||||
|
|
|
|
|
|
В результате появляется возможность нахо- |
|||||||||||||
Zд u |
|
|
|
|
|
дить смешанные и все другие необходимые |
|||||||||||||
|
|
|
|
|
производные, причем не только в узловых точ- |
||||||||||||||
|
|
rд u |
M 1, 1 |
M 1,0 |
M 1, 1 |
ках Mi, j , но и в промежуточных между ними, в |
|||||||||||||
|
|
|
том числе и за пределами отсека поверхности, |
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
ограниченного |
дугами |
M 1, 1M 1,0 M 1, 1 , |
|||||||||||
|
|
|
Y u |
|
|
M |
1, 1 |
M |
0, 1 |
M |
1, 1 |
, |
M |
1, 1 |
M |
1,0 |
M |
1, 1 |
и |
|
|
|
д |
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
M 1, 1M0, 1M 1, 1 . В последнем случае к |
|||||||||||||
|
|
|
|
|
|
результатам |
нахождения |
всех |
производных |
||||||||||
|
|
|
|
|
|
следует относиться с некоторой долей осторож- |
|||||||||||||
|
|
|
|
|
|
ности – чем дальше от центра интерполирования |
|||||||||||||
|
|
|
Xд u |
|
|
M0,0 |
расположена точка, |
в которой требуется |
|||||||||||
|
|
|
|
|
расчитать производные, тем больше погрешно- |
||||||||||||||
|
|
|
|
|
|
сти расчетов. |
|
|
|
|
|
|
|
|
|
||||
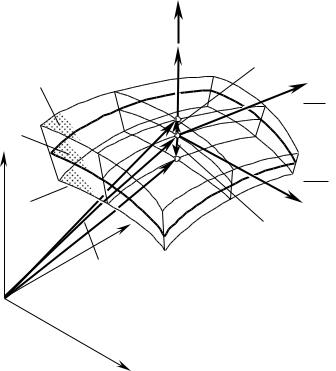
Рис. 1.18. К нахождению смешанных производных |
|
Как видно из изложенного, рассмотренный |
|||||||||||||||||
подход к нахождению смешанных производных |
|||||||||||||||||||
|
дискретно заданной поверхности Д И . |
уравнения поверхности |
Д И |
предельно прост |
|||||||||||||||
– для более точных расчетов могут быть использованы более совершенные (и вместе с тем, как правило, более громоздкие) методы нахождения смешанных производных.
1.2.6. Задание сложных поверхностей Д(И) с учетом допусков на точность их размеров и формы.
При формообразовании поверхностей деталей режущими инструментами неизбежны погрешности
1.2. Задание рабочих поверхностей деталей и инструментов. |
|
Расчет элементов их локальной геометрии |
85 |
|
технологической системы. Поэтому номинальные значения параметров обработанной поверхности задают с допусками. В связи с этим появляется некоторая неоднозначность в задании поверхности Д . Чтобы исклю-
чить такую неоднозначность и обеспечить однозначность в задании поверхности детали, необходимую для последующего расчета инструмента, вводят в рассмотрение так называемую расчетную поверхность, которую обычно располагают в поле допуска на поверхность Д детали и рассматривают ее как расчетную поверх-
ность (рис. 1.19).
Рассмотренные выше методы задания и аналитического описания поверхностей деталей и инструментов позволяют ввести в рассмотрение аналитическое представление поверхности Д И с учетом допусков на точ-
ность их размеров и формы.
Реальные поверхности Д И всегда имеют отклонения размеров и параметров формы от их номи-
нальных значений, заданных чертежом детали и инструмента. Приемлемые величины отклонений регламентируются допусками на точность каждого из параметров. Результирующая погрешность обработки
h не должна превышать величину допуска hд на точность обработки (h hд ). |
|
|
|
|
|
||||||||||||||||
Наряду с номинальными поверхностями Дн |
и |
И |
будем рассматривать поверхности |
Д ..нв |
и И ..нв , |
||||||||||||||||
отстоящие |
от |
номинальных |
поверхностей Д И |
на |
|
величины |
верхних д.в, и.в |
и нижних |
д.н, и.н |
||||||||||||
предельных отклонений для поверх- |
|
|
|
|
|
|
Nд |
|
|
|
|
|
|||||||||
ностей Д и И соответственно. Ана- |
|
|
|
|
|
|
|
|
|
|
|
||||||||||
литическое |
описание |
поверхностей |
|
|
|
|
|
|
|
|
в.д U |
|
,V |
||||||||
предельных отклонений рассмотрим на |
|
|
|
|
|
|
n д |
|
д |
||||||||||||
примере |
поверхностей |
Д .в |
и |
Д |
.н |
|
|
Д |
в |
|
|
|
|
|
д |
||||||
|
|
|
|
|
|
|
|
|
|||||||||||||
(рис. 1.19), после чего распространим |
|
|
|
|
|
|
|
|
|
|
|
rд |
|||||||||
полученный результат на поверхности |
Дн |
|
|
|
|
|
|
|
|
|
Vд |
||||||||||
предельных отклонений |
И .в |
и И .н |
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
||||||||||||
исходной |
инструментальной |
поверх- |
Zд |
|
|
|
|
|
|
|
|
|
|
|
|||||||
ности. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
rд |
|
В наиболее простом случае одно |
|
|
|
|
|
|
rд. n |
|
|
|
|
||||||||||
из предельных отклонений рассматри- |
Д |
|
|
|
|
|
|
|
|
Uд |
|||||||||||
вается |
равным нулю |
( д.в |
0 |
или |
|
|
н |
|
r |
B |
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
||||||||||||
д.н 0 ). |
Тогда |
допуск на |
точность |
|
|
|
|
|
д |
|
|
|
U |
|
,V |
||||||
|
|
|
|
|
|
|
н.д |
д |
|||||||||||||
обработки будет равен значению того |
|
|
|
|
|
|
Yд |
|
|
д |
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
предельного отклонения, которое не |
|
|
|
|
|
|
rд |
|
|
|
|
|
|||||||||
равно |
|
нулю: |
hд д.н |
|
или |
|
|
|
|
|
|
|
|
|
|
|
|
||||
h д.в . |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
д |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
В более общем случае оба |
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
предельных отклонения не равны ну- |
|
|
|
|
|
|
Xд |
|
|
|
|
|
|||||||||
лю: д.в |
0, |
д.н |
0 , в том числе они |
|
|
|
|
|
|
|
|
|
|
|
|||||||
могут |
иметь |
противоположные |
знаки |
|
|
|
|
|
|
|
|
|
|
|
|
||||||
(противоположные направления отсче- |
Рис. 1.19. Поверхность |
Д детали и поверхности Д В верхнего |
|||||||||||||||||||
та), а также быть равными по модулю. |
|||||||||||||||||||||
Поверхность допуска Д h (в пер- |
|
|
и |
Д Н нижнего предельных отклонений. |
|
|
|
||||||||||||||
вом случае) и поверхности верхнего Д .в и нижнего Д .н предельных отклонений (во втором случае) будут эквидистантными (параллель-
ными) номинальной поверхности Д детали.
Как правило каждая поверхность детали обрабатывается одним технологическим методом. Поэтому естественно предположить, что в виду постоянства условий обработки величины верхнего и нижнего предельных отклонений должны быть постоянными по величине – именно это имеет место при обработке большинства деталей общемашиностроительного назначения. При обработке деталей с рабочими поверх-
1. Рабочие поверхности деталей и инструментов
86
ностями сложной формы, когда имеет место изменение в большом диапазоне кривизны обрабатываемой поверхности, условия взаимодействия инструмента с деталью в пределах обрабатываемой поверхности Д
переменны. Это оказывает влияние на точность обработки и игнорировать это влияние можно не всегда. Поэтому допуск на точность обработки сложной поверхности детали может быть переменным в пределах обрабатываемого участка ее поверхности: в наиболее общем случае переменные величины предельных отклонений для всей обрабатываемой поверхности детали можно рассматривать как функции гауссовых координат на Д , т.е.
д.в д.в U |
д |
,V ; |
|
д.н |
|
д.н |
U |
д |
,V |
. |
|
д |
|
|
|
д |
|
Допуск на точность обработки, верхние и нижние предельные отклонения отсчитываются от номинальной поверхности Д по нормали к ней.
Исходим из того, что номинальная поверхность Д аналитически описана уравнением в векторной форме: rд rд(Uд,Vд) , а орт нормали к поверхности Д будет:
|
|
|
|
rд |
|
rд |
|
|
n |
д |
|
|
Uд |
Vд |
. |
||
|
|
|||||||
|
|
|
|
|||||
|
|
|
rд |
|
rд |
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
Uд |
Vд |
|||
|
|
|
|
|
|
|||
Векторные уравнения поверхности допуска и поверхностей верхнего и нижнего предельных отклонений для детали представимы в виде
(1.90) |
rд[h] rд |
n д hд (Uд,Vд) ; |
|
|
|
|
|||||
(1.91) |
r д.в r |
д |
n |
д |
д.в(U |
д |
,V ) ; |
|
|
|
|
|
|
|
|
д |
|
|
|
|
|||
(1.92) |
rд.н rд n д д.н(Uд,Vд) |
|
|
|
|
||||||
соответственно. |
В эти уравнения подставляются алгебраические значения параметров |
[h ] , |
в.д(U |
д |
,V ) |
||||||
|
|
|
|
|
|
|
|
д |
|
д |
|
и н.д(Uд,Vд) , т.е. взятые с учетом их знака.
Каждое из приведенных трех уравнений может быть записано в проекциях на координатные оси, например, так:
rд[h] rд.x nд.x[hд](Uд,Vд) iд rд.y nд.y[hд](Uд,Vд) jд rд.z nд.z[hд](Uд,Vд) k д.в
(1.93) r д.в rд.x nд.x д.в (Uд,Vд) i д rд.y nд.y д.в (Uд,Vд) jд rд.z nд.z д.в (Uд,Vд) k д.в ;
r д.н rд.x nд.x д.н (U д,Vд) i д rд.y nд.y д.н ](U д,Vд ) jд rд.z nд.z д.н (U д,Vд) k д.в
или соответственно в параметрической форме.
Очевидно, что изложенное справедливо и в отношение исходной инструментальной поверхности И . Поэтому по аналогии с (90), (91) и (92) сразу запишем векторные уравнения поверхностей допуска и поверхностей верхнего и нижнего предельных отклонений для инструмента:
(1.94) |
rи[h] r и n и hи (Uи ,Vи ) ; |
1.3. О классификации рабочих поверхностей деталей и инструментов |
87 |
||||||
|
|
|
|
|
|
|
|
r и.в r |
и |
n |
и |
и.в(U |
и |
,V ) ; |
(1.95) |
|
|
|
и |
|
|||
rи.н rи |
n и |
и.н(Uи,Vи) . |
(1.96) |
||||
Для инструмента уравнения, аналогичные (93), записываются так:
rи[h] rи.x nи.x[hи](Uи,Vи) iи rи.y nи.y[hи](Uи,Vи) jи rи.z nи.z[hи](Uи,Vи) k и.в ;
r |
и.в r |
n |
и.в |
(U |
и |
,V ) i |
и |
r |
n |
и.в |
(U |
и |
,V ) j |
и |
r |
n и.в |
(U |
и |
,V ) k |
и.в |
; |
|
и.x |
и.x |
|
и |
и.y |
и.y |
|
и |
и.z |
и.z |
|
и |
|
||||||||
rи.н rи.x nи.x и.н(Uи,Vи) iи rи.y nи.y и.н](Uи,Vи) jи rи.z nи.z и.н(Uи,Vи) k и.в .
Уравнения (94), (95) и (96), а также соответствующие им формы записи в проекциях на координатные оси (93) или в параметрическом виде используются при расчете производительности многокоординатного формообразования сложных поверхностей деталей на станках с ЧПУ и при решении других задач синтеза.
1.3. О классификации рабочих поверхностей деталей и инструментов
Многообразие форм обрабатываемых поверхностей деталей и типоразмеров применяемых для этих целей фасонных инструментов огромно. Это приводит к большому разнообразию в технологии формообразующей обработки деталей. Для решения задачи синтеза наивыгоднейшего варианта технологии многокоординатной обработки сложных поверхностей деталей на станках с ЧПУ необходима подробная научная
классификация поверхностей Д И , включающая в себя все возможные виды этих поверхностей, опреде-
ленным образом стратифицированных.
1.3.1. Необходимость разработки классификации поверхностей деталей и инструментов.
Геометрическая классификация поверхностей деталей и инструментов, учитывающая требования технологии изготовления деталей, необходима для систематизации известных способов формообразования поверхностей
при механической обработке деталей, упрощения исследования сложных поверхностей Д И и изучения их
геометрической структуры с целью разработки новых высокоэффективных способов формообразования – с тем, чтобы уметь точно и с минимальными затратами времени и средств обрабатывать любую поверхность детали.
Известны многократные попытки классифицировать поверхности технических форм, сгруппировать разнообразные детали по определенным признакам в однотипные семейства для нормализации и типизации технологических процессов их изготовления. Вместе с тем не охваченное единой классификацией их разнообразие сохраняется большим – это приводит к серьезным затруднениям при проектировании, выборе и назначении рациональных видов оборудования, к тому, что многие задачи технологии машиностроения решаются эмпирическим путем.
Поиски принципов для разработки научных основ технологии машиностроения сопряжены с рядом затруднений. Избежать по крайней мере одного из серьезных затруднений, вызванных разнообразием видов изготавливаемых деталей и типов обрабатываемых их рабочих поверхностей, представляется возможным, если использовать формализованный подход к анализу и систематизации форм технических поверхностей, поскольку огромнейшее разнообразие видов изготовляемых деталей сводится к разнообразию форм их рабочих поверхностей.
С уверенностью можно утверждать, что в настоящее время нет научной классификации поверхностей технических форм, в полной мере удовлетворяющей потребностям теории формообразования поверхностей при механической обработке деталей, технологии машиностроения и смежных технических дисциплин. Это
следствие большой сложности задачи разработки научной классификации поверхностей Д И . Установлено
(Фролов С.А., 1983), что в обозримом будущем трудно ожидать возможности решения проблемы разработки классификации поверхностей не только вообще, но и классификации в более узком смысле – классификации
поверхностей технических форм. В этой связи подчеркивается, что многообразие поверхностей Д И и

1. Рабочие поверхности деталей и инструментов
88
способов их получения не позволяет создать строгую систему для классификации как поверхностей вообще, так и поверхностей Д И в частности. С геометрической точки зрения классификация поверхностей в целом
(как единого геометрического образа) не может иметь научного обоснования. Опыт убедительно показал бесплодность попыток создать научную классификацию поверхностей деталей и инструментов на макроуровне – как единых геометрических образов, которая для технических приложений является более предпочтительной.
Сложившееся положение с разработкой классификации поверхностей технических форм вынуждает изменить уровень рассмотрения этой проблемы, а именно: вместо систематизации поверхностей Д И в
целом как таковых (глобальный подход) классифицировать возможные виды их локальных участков
(локальный подход).
Правомерность локального подхода к вопросу разработки классификации поверхностей Д И оправдывается, в частности, следующим постулируемым положением:
Постулат 1.1. Если при обработке детали обеспечить выполнение всех условий формообразования поверхностей резанием в каждой точке обрабатываемой поверхности Д , то тем самым указанные условия
формообразования могут быть выполнены и для всей обрабатываемой поверхности детали; если хотя бы в одной точке обрабатываемой поверхности детали одно из условий формообразования поверхностей не выполняется, то в этом случае обработать деталь в полном соответствии с требованиями чертежа нельзя.
Первая часть постулированного положения является только необходимой, но не достаточной для обеспечения возможности обработки поверхности детали в полном соответствии с требованиями чертежа, тогда как вторая является достаточной для того, чтобы точно изготовить деталь было нельзя.
Сложные поверхности деталей не допускают движения “самих по себе” – это предопределяет целесообразность локального подхода к их формообразованию, а именно – в дифференциальной окрестности текущей точки на Д и, в этой связи, предполагает широкое использование результатов, полученных в
дифференциальной геометрии поверхностей (Радзевич С.П., 1991). Это также свидетельствует в пользу развития локального подхода к разработке классификации поверхностей деталей и инструментов.
При локальном подходе классификация может быть основана на анализе внутренних свойств и локальной топологии поверхностей Д И .
1.3.2. Круговые диаграммы локальных участков поверхностей деталей и инструментов. Для анализа, наглядной графической интерпретации свойств и разработки классификации гладких регулярных локальных участков поверхностей Д деталей и исходных инструментальных поверхностей И целесообразно
примененить круговые диаграммы (круги Мора1). Уравнение круговых диаграмм локальных участков поверхностей Д И могут быть получены так.
Следуя Nutbourn A. A. (1984) и Nutbourn A. A., Martin R. (1988) при рассмотрении круговых диаграмм локальных участков гладкой регулярной поверхности Д(И) исходим из формулы Эйлера2
(1.97) |
k |
д и |
k |
cos2 k |
2.д и |
sin 2 |
|
|
|
1.д и |
|
|
|
1Мор, Христианн Отто (Mohr, Christian Otto ) (8.10.1835-2.10.1918) – немецкий ученый в области механики. Родился в Вессельбурне (Гольштейн). Окончил Политехническую школу в Ганновере (1855). В 1856-1866 работал инженером железных дорог, в 1867-1873 – профессор Штуттгартского, в 1873-1899 Дрезденского политехнических институтов. С 1900 – в отставке. Одним из первых получил степень инженера-доктора honoris causa . Один из основоположников графической кинематики. Развивал методы графостатики. Предложил графический метод построения упругой линии в простых и неразрезных балках. Разработал метод расчета неразрезных балок с помощью уравнения трех моментов. Создал теорию прочности (теория Мора), разработал графический метод определения напряжений при сложном напряженном состоянии (круг Мора). Впервые применил расчет конструкций на невыгодное нагружение с помощью линий влияния, создал теорию расчета статически неопределимых систем методом сил. Дал обобщение формулы Максвелла (формула МораМаксвелла).
2Эйлер, Леонард (Euler , Leonhard) [4(15). 4.1707, Базель, Швейцария, – 7(18) 9.1783, Петербург], Математик, механик и физик. Родился в семье небогатого пастора Пауля Эйлера. Работал во многих отраслях математики, механики и др. В дифференциальной геометрии детально исследовал свойство геодезических линий, впервые применил натуральные уравнения кривых, а главное, заложил основы теории поверхностей. Ввел понятие главных направлений в точке поверхности, доказал их ортогональность, вывел формулу для кривизны любого нормального сечения, начал изучать развертывающиеся поверхности и др. В одной посмертно опубликованной работе предварил исследования К.-Ф.Гаусса по внутренней геометрии поверхностей.
1.3. О классификации рабочих поверхностей деталей и инструментов |
89 |
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
||
и соотношения С. Жермен1 |
|
|
|
|
|
|
|
|
|
|
||
|
|
|
tд и k2.д и k1.д и sin cos , |
(1.98) |
||||||||
где k1.д и и k2.д и – главные кривизны локального участка поверхности |
Д И в заданной ее точке M |
|||||||||||
(причем k1.д и k2.д и ); |
|
|
|
|
|
|
|
Д И в точке M , составляющего угол с |
||||
kд и – кривизна плоского нормального сечения поверхности |
||||||||||||
первым главным сечением C1.д и ; |
|
|
|
|
|
|
||||||
tд и – кручение поверхности |
Д И в точке M в наперед заданном направлении на поверхности. |
|||||||||||
Формуле (97) эквивалентно соотношение (Koenderink, J.J., 1990, с. 228): |
|
|
||||||||||
k |
д и |
k |
|
cos2 |
k |
2.д и |
sin 2 H |
д и |
|
k1.д и k2.д и |
cos 2 . |
|
|
|
|||||||||||
|
1.д и |
|
|
|
2 |
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
||
Формула (97) позволяет определить кривизну текущего нормального сечения поверхности Д И , если
известны главные радиусы кривизны и угол между исследуемым сечением и одним из них.
Чтобы получить уравнение круговой диаграммы для кривизны и кручения локального участка поверхности Д И , перепишем уравнения (97) и (98) в виде
kд и 12 k1.д и k2.д и 12 k1.д и k2.д и cos 2 ;
tд и 12 k1.д и k2.д и sin 2
соответственно, после чего исключим из них параметр . Выполнив необходимые преобразования, приходим к уравнению окружности
k |
k |
k |
k |
2.д и |
t |
2 |
0 . |
(1.99) |
д и |
1.д и |
д и |
|
|
д и |
|
|
В системе координат kд и tд и круговая диаграмма локального участка поверхности Д И представляет
|
|
|
k |
k |
2.д и |
|
k |
k |
2.д и |
|
|
|
||
собой окружность радиуса |
1.д и |
|
с центром |
|
1.д и |
|
, 0 |
|
. Обратим внимание на то, что |
|||||
|
|
|
|
2 |
|
|
|
2 |
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
||||
|
k1.д и k2.д и |
~ |
|
|
|
|
|
|
|
Д И в точке M . Задаваемая уравнением |
||||
|
|
Mд и – т.е. равно средней кривизне поверхности |
||||||||||||
2 |
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|||
(99) круговая диаграмма пересекает ось абсцисс (рис. 1.20) в точках |
k1.д и , 0 |
и k2.д и , 0 . |
||||||||||||
Прежде, чем перейти к рассмотрению круговых диаграмм локальных участков поверхности Д И ,
дополнительно введем в рассмотрение их векторные диаграммы. Для этого требуется кратко рассмотреть доказательство следующей теоремы (Nutbourn A. A., Martin R., 1988):
1Жермен, Софи (Germain , Sophie) (1.4.1776 – 17.6.1831) – французский математик и механик, родилась в Париже, дочь ювелира. Самостоятельно изучила метаматику. Состояла в переписке с Ж.Л.Д'Аламбером, Ж.Л.Лагранжем, К.-Ф.Гауссом. Оказала Гауссу существенную поддержку в 1807, когда французские войска оккупировали Ганновер. Разрабатывала теорию чисел, теорию упругости и
теорию колебаний. Доказала невозможность положительного решения в целых числах выражения xn yn zn , если x, y, z – простые
числа, не равные друг другу, а n – любое простое число меньше 100. Вывела несколько формул, названных ее именем. В развитии
математической физики труды Жермен являются основополагающими. Нашла ряд важных положений в теории упругих пластинок.
Написала также “Рассуждения о состоянии наук и литературы в различные культурные эпохи” (1833). Премия Института Франции
(1816).