

Radzevich, S.P. Monograph - 2001
.pdfГ л а в а 3. Системы координат и линейные преобразования
Для решения задачи синтеза наивыгоднейшего формообразования поверхности детали используются различные системы координат и соответствующие линейные преобразования. Применение находят системы координат следующих видов: прямоугольные и косоугольные декартовы, однородные, цилиндрические, сферические и другие криволинейные системы координат. Линейные преобразования в основном связаны с преобразованием аналитического описания геометрических образов детали и инструмента, заданных в различных системах координат.
3.1. Используемые системы координат
При разработке технологии формообразующей обработки первичной является деталь. Тело детали ограничено рядом поверхностей. Каждая отдельно взятая поверхность аналитически описывается в некоторой системе координат. Степень сложности аналитического представления геометрической информации об обрабатываемой поверхности Д и о детали целиком зависит от выбора системы координат, в которой
описывается как конкретная поверхность Д , так и вся деталь.
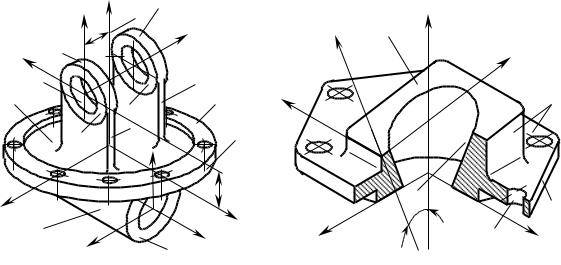
Для аналитического описания рабочих поверхностей деталей удобно вводить в рассмотрение системы координат X1Y1Z1 , X2Y2 Z2 , , XiYi Zi , XдYдZд , XиYиZи и др., связанные с отдельно взятой поверхностью. Очевидно, например, что поверхности детали, обозначенные 1 (рис. 3.1.1), удобно описывать в системе координат X1Y1Z1 , поверхности 2 имеют более простое аналитическое представление в системе
координат X2Y2 Z2 , а поверхности 3 – в системе координат XдYдZд . Аналитическое описание детали будет
получено, если уравнения всех ее поверхностей будут представлены в некоторой общей системе координат, например, в системе координат XдYдZд . Для этого начала систем координат X1Y1Z1 и X2Y2 Z2 следует
совместить с началом системы координат XдYдZд и обеспечить однонаправленность соответствующих осей координат. Например, чтобы систему координат X1Y1Z1 совместить с системой координат XдYдZд , следует:
- первую систему координат X1Y1Z1 развернуть вокруг оси X1 в отрицательном направлении на угол
90 . Такое преобразование описывается оператором Rt 90 , X |
|
поворота системы координат; |
||||
|
1 |
|
|
|
|
|
- в новом положении систему координат X1Y1Z1 |
развернуть вокруг оси |
Z1 |
в положительном |
|||
направлении на угол 90 . Такое преобразование |
описывается |
оператором |
Rt |
90 , Z |
поворота |
|
|
|
|
|
|
1 |
|
системы координат. После двух поворотов оси систем координат становятся однонаправленными;
-из последнего положения первую систему координат сместить вдоль оси Z1 на величину a , равную расстоянию между плоскостями координат X1Y1 и XдYд . Такое преобразование описывается оператором Tr a, Z1 переноса системы координат;
-и, наконец, из последнего положения сместить первую систему координат вдоль оси X1 на величину
b , равную расстоянию между плоскостями координат Y1Z1 и YдZд . Это преобразование описывается оператором Tr b, X1 переноса системы координат.
3.1. Используемые системы координат |
151 |
|
|
Zд |
1 |
|
|
|
|
|
|
b |
|
|
Z |
|
|
|
|
Y |
Z1 |
|
1 |
д |
|
|
|
1 |
|
|
|||
X1 |
1 |
1 |
|
Z1 |
|
|
X1 |
1 |
|
|
1 |
Y |
|
|
|
3 |
|
|
3 |
|
|
2 |
|
|
|
1 |
|
|
|||
|
|
|
1 |
|
|
|
|
|
|
1 |
1 |
3 |
|
|
|
|
|
X2 |
|
|
|
||
|
|
|
|
|
|
|
Xд |
|
a |
|
2 |
|
2 |
|
|
|
|
|
||
|
|
|
|
|
|
|
2 |
Y2 |
Yд |
|
|
2 |
Yд |
|
2 |
Z2 |
Xд |
|
|
|
|
|
|
|
|
||
|
1. |
|
|
|
2. |
|
Рис. 3.1. Системы координат детали.
Результирующий переход от системы координат X1Y1Z1 к системе координат XдYдZд описывается оператором результирующего преобразования координат Rs 1 д , который определяется совокупностью и
последовательностью применения операторов Rt 90 , X1 , Rt 90 , Z1 , Tr a, Z1 и Tr b, Z1 частных
преобразований координат.
Аналогичное справедливо и в отношение детали (рис. 3.1.2): в этом случае поворот первой системы координат X1Y1Z1 вокруг оси Y1 на угол описывается оператором Rt , Y1 поворота системы координат.
При автоматизированном воспроизведении сложных поверхностей, состоящих из отдельных отсеков, на станке ЧПУ требуется определить положение каждого из формообразуемых отсеков поверхности детали. Отдельные отсеки сложной поверхности Д детали, как и отдельные поверхности одной и той же детали, могут быть аналитически представлены в различных (своих) системах координат. Вследствие преимуществ такого подхода к заданию и аналитическому описанию отсеков отдельных поверхностей, он часто используется при решении задач формообразования поверхностей деталей. Это выполняется в порядке, рассмотренном выше.
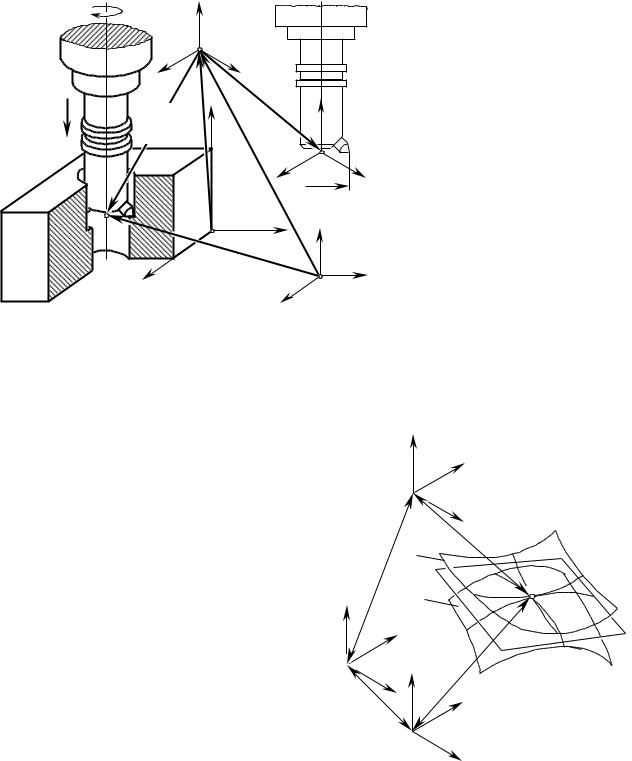
Автоматизированная подготовка управляющих программ для многокоординатных металлорежущих станков с ЧПУ предусматривает формирование в памяти системы ЧПУ численных данных, описывающих обрабатываемую деталь, инструмент, движения рабочих органов станка и др. в некоторой системе координат. При подготовке к обработке даже относительно простой детали (рис. 3.2) должны быть установлены размерные связи между системой координат XстУстZст станка с ЧПУ, относительно которой производится
отсчет размеров, исходной точкой, являющейся началом программы обработки (она служит началом системы координат Xи.т.Yи.т.Zи.т.), деталью и инструментом, с которыми связаны системы координат XдУдZд и
XиУиZи соответственно и др. При этом многие отдельные поверхности обрабатываемой детали (плоскости,
наружные и внутренние круглые цилиндры, внутренние и наружные участки поверхностей тора, конуса, сферы, винтовых поверхностей и др.) обычно задаются в своих системах координат. Кроме перечисленных (см. рис. 3.2) используются и иные (вспомогательные, промежуточные и пр.) системы координат, необходимые для упрощения аналитического описания процесса обработки заданной детали.
Взаимное расположение и относительная ориентация систем координат определяется векторами rи , rи.т., r прогр., r п , ri и др., для оперирования которыми необходимо иметь их аналитическое представление в
некоторой общей для всех векторов и других геометрических элементов процесса формообразования системе координат. Приведение перечисленных векторов к общей системе координат предполагает наличие соотношений, описывающих связи между используемыми системами координат.
152 |
3. Системы координат и линейные преобразования |
|
и |
Zи.т |
Исходная |
|
|
|
В |
процессе |
обработки сложных |
||||||
|
|
|
поверхностей деталей на многокоорди- |
||||||||||||
|
|
|
|
точка |
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
натных станках с ЧПУ требуется обра- |
|||||||
|
|
|
|
|
|
|
|
|
|
||||||
|
|
Xи.т |
|
Yи.т |
|
|
|
|
зование замкнутого цикла последова- |
||||||
|
|
|
|
|
|
|
|
|
|
тельных преобразований координат. В |
|||||
|
|
|
|
|
|
|
rи |
|
|
простейшем случае такой цикл состав- |
|||||
|
|
|
|
|
|
|
|
|
ляют системы координат |
XстYстZст |
|||||
S |
Записано |
|
|
|
|
|
Zи |
||||||||
Zд |
|
|
|
|
металлорежущего станка, |
XдYдZд об- |
|||||||||
r |
|
|
|
|
|||||||||||
|
в УП |
|
|
|
и.т |
|
|
рабатываемой детали, XиYиZи приме- |
|||||||
|
|
|
|
|
|
|
|
|
|
||||||
|
rпрогр. |
|
|
|
|
X |
и |
Y |
няемого |
металлорежущего |
инструмен- |
||||
|
|
|
|
|
|
|
|
и |
|
x K y K z K локальная система ко- |
|||||
|
|
|
|
|
|
|
|
|
Dи |
та, |
|||||
|
|
|
|
|
|
|
|
|
|
ординат, связанная с точкой K касания |
|||||
|
|
|
ri |
|
|
|
Yд |
|
|
поверхностей Д и И и другие вспомо- |
|||||
|
|
|
Задано ТУ |
|
Zcт |
гательные системы координат (рис. 3.3). |
|||||||||
|
|
|
|
|
Образование замкнутого цикла прямых |
||||||||||
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
Ycт |
и обратных последовательных преобра- |
|||||
|
|
Xд |
|
|
|
|
Xcт |
|
зований координат также предполагает |
||||||
|
|
|
|
|
|
|
возможность аналитического описания |
||||||||
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
перехода от одной системы координат к |
|||||
Рис. 3.2. Примеры связей между системами координат при |
другой в прямом и в обратном направ- |
||||||||||||||
лениях. |
|
|
|
||||||||||||
обработке деталей на станке с ЧПУ. |
|
|
|
|
|
||||||||||
|
|
|
В памяти системы ЧПУ металлоре- |
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|||||
жущим станком необходимо иметь данные, описывающие соотношения и взаимосвязь между используемыми |
|||||||||||||||
системами координат с тем, чтобы определить относительную взаимную ориентацию отдельных отсеков и |
|||||||||||||||
отдельных обрабатываемых поверхностей деталей. Такие соотношения описывают преобразования коорди- |
|||||||||||||||
нат. Они основаны на том, что путем последовательных переносов и поворотов вдоль и вокруг осей |
|||||||||||||||
координат одну систему координат можно привести |
|
Zд |
|
|
|
|
|||||||||
к другой. |
|
|
|
|
|
|
|
|
|
|
Yд |
|
|
||
Следует обратить внимание на то, что линейное |
|
|
|
|
|
|
|||||||||
преобразование координат в трехмерном простран- |
|
|
|
|
|
|
|||||||||
стве можно толковать двояко. Во-первых, на коорди- |
|
|
|
Xд |
|
|
|||||||||
наты X1 , Y1 , Z1 |
и X2 , Y2 , Z2 |
можно смотреть как |
|
|
|
|
|
||||||||
на координаты одной и той же точки в различных |
|
|
|
|
|
|
|||||||||
системах координат (Смирнов В.И., 1974). |
|
Такое |
|
И |
|
|
|
|
|||||||
преобразование обычно называют координатным. |
|
|
|
|
|
||||||||||
|
|
|
|
|
|
||||||||||
Во-вторых, возможно толкование линейного |
|
|
|
|
K |
|
|||||||||
преобразования как переход от одной точки с |
|
|
Д |
|
|
|
|||||||||
координатами X1 , Y1 , Z1 |
к другой X2 , Y2 , Z2 в |
Zст |
Yст |
|
|
|
|
||||||||
одной и той же системе |
координат. |
|
Такое |
|
|
|
|
||||||||
преобразование принято называть отображающим. |
|
|
|
|
|
|
|||||||||
Использование |
линейных |
преобразований |
дает |
|
Xст |
|
|
|
|
||||||
возможность, с одной стороны, генерировать |
|
Zи |
|
|
|
||||||||||
геометрические |
образы – |
если |
считать |
параметры |
|
|
|
Yи |
|
|
|||||
n n 1, N их криволинейными координатами. Это |
|
|
|
|
|
||||||||||
|
|
|
|
|
|
||||||||||
особенно существенно при решении задач геометри- |
|
|
|
Xи |
|
|
|||||||||
ческого моделирования. С другой стороны – |
|
|
|
|
|
||||||||||
описывать траектории движений: относительные |
|
|
|
|
|
|
|||||||||
повороты и перемещения |
систем |
координат |
(если |
Рис. 3.3. |
Простейший пример |
замкнутого цикла |
|||||||||
какие-либо из параметров |
n n 1, N считать пара- |
||||||||||||||
|
прямых и |
обратных |
последовательных |
||||||||||||
метрами этих движений). |
|
|
|
|
|
|
|
|
преобразований координат. |
|
|||||
|
|
|
|
|
|
3. Системы координат и линейные преобразования |
|
|
|
|
|
|
153 |
|||||
Операторы преобразований координат: |
Tr a, X , |
Tr b, Y |
, |
Tr c, Z |
переноса исходной системы |
|||||||||||||
|
|
|
|
|
|
|
1 |
1 |
|
|
1 |
|
|
|
|
|
|
|
координат |
X Y Z |
на величины a , b и c вдоль осей координат |
X |
, Y , |
Z |
в новое положение |
X |
2 |
Y Z |
2 |
и |
|||||||
|
1 |
1 |
1 |
|
Rt , Y |
, Rt , Z |
|
|
1 |
1 |
1 |
|
|
2 |
|
|
||
операторы |
Rt , |
X , |
поворота вокруг этих же осей координат на углы |
, |
|
|
и |
|
||||||||||
|
|
|
|
1 |
1 |
1 |
|
|
|
|
|
|
|
|
|
|
|
|
удобно (хотя это и не является обязательным) представлять в матричной форме. В этом случае для нахождения опреатора Rs 2 1 результирующего преобразования координат операции с ними существенно
упрощаются.
Рассмотрим основные свойства матриц и операций с ними, которые находят применение при решении задач формообразования поверхностей деталей.
3.2.Сведения о матрицах, необходимые для решения задач формообразования поверхностей деталей
Решение задач формообразования поверхностей деталей требует многократных прямых и обратных преобразований систем координат и пространства, в которых одни величины линейно выражаются через другие. Операции такого рода удобно описывать при помощи матриц.
3.2.1. Основные определения. Матрицей принято называть совокупность элементов aij ( i 1, 2, , m ; j 1, 2, , n ), расположенных в виде прямоугольной таблицы из “m ” строк и “n ” столбцов, где m и n – числа, определяющие размер матрицы:
|
a11 |
a12 |
|
a1n |
|
|
|
|
|
|
A А a 21 |
a 22 |
|
a 2n . |
|
|
|
|
|
|
|
a m2 |
|
|
|
am1 |
a mn |
||
Матрица А |
сокращенно записывается так: A aij m n . |
|
||
К прямоугольным матрицам относится матрица-столбец, часто называемая вектором (у нее n 1 ):
|
Х |
|
|
|
Р |
|
|
|
1 |
|
|
1 |
|
Х |
Х2 ; |
Р |
Р2 |
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Хm |
|
Рm |
|||
и матрица-строка, у которой число строк m 1 : С С1 С2 |
... |
Сn . |
||||
Если m n , матрица будет квадратной, в этом случае n – порядок матрицы.
Линия, на которой располагаются элементы aij квадратной матрицы, является главной диагональю, а
элементы aii ( i 1, 2, , n ) – главными.
Линии, параллельные главной диагонали, называют кодиагоналями. Квадратная матрица будет симметричной, если aij a ji .
Квадратная матрица, все элементы которой (кроме диагональных), равны нулю aij 0; |
i j , является |
||||||
диагональной: |
|
|
|
|
|
|
|
a11 |
0 |
|
0 |
|
|
|
|
|
0 |
a 22 |
|
0 |
|
|
|
A |
|
, |
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0 |
0 |
|
a nn |
|
|
|
154 |
3.2. Сведения о матрицах, необходимые для решения задач формообразования поверхностей деталей |
|
или в такой форме: A a11 |
a 22 a nn . |
|
Диагональная матрица, все элементы которой равны единице, является единичной и обозначается E :
1 |
0 |
|
0 |
|
1 |
|
|
E 0 |
|
0 . |
0 0 1
В алгебре матриц единичная матрица имеет такое же значение, какое в элементарной алгебре – единица. Матрица, все элементы которой равны нулю, является нулевой и обозначается символом 0 .
Две матрицы одинаковых размеров равны, если равны их соответствующие элементы.
Кодиагональная (или ленточная) матрица – это квадратная матрица с ненулевой диагональю, по обе стороны от которой имеется одинаковое число ненулевых диагоналей; остальные элементы кодиагональной матрицы равны нулю. Примером трехдиагональной матрицы служит матрица:
a11 |
a12 |
|
|
0 |
|
|
|
a22 |
a23 |
|
|
a 21 |
|
|
|||
A |
|
a32 |
a33 |
a34 |
. |
|
|
|
|
|
|
|
|
|
|
|
|
|
0 |
|
|
a n n-1 |
|
|
|
|
ann |
||
Применение кодиагональных матриц позволяет более эффективно использовать память ЭВМ и других вычислительных устройств. Поэтому целесообразно предварительно матрицы преобразовывать таким образом, чтобы возможно большее их количество представляло собой кодиагональные матрицы.
В пределах каждой симметричной пары диагоналей все элементы кодиагональной матрицы могут быть равны один другому. В этом случае матрица становится модулированной кодиагональной матрицей вида
a |
b |
|
|
|
|
|
|
|
|
b |
a |
b |
|
|
A |
b |
a |
b |
. |
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
b |
|
|
|
|
a |
|
Квадратная матрица, у которой все элементы, расположенные по одну сторону от главной диагонали,
равны нулю, является треугольной. Различают верхнюю (правую) |
треугольную |
aij 0; i j и нижнюю |
|||||||||||||
(левую) треугольную aij |
0; i j |
матрицы: |
|
|
|
|
|
|
|
|
|
||||
a |
11 |
a |
12 |
a |
13 |
|
a |
1n |
|
|
b |
|
|
0 |
|
|
|
|
|
|
|
|
11 |
|
|
|
|
||||
A |
|
a22 |
a 23 |
a2n |
; |
B b21 |
b22 |
|
. |
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
bn2 |
bn3 |
|
|
0 |
|
|
|
|
|
ann |
|
bn1 |
bnn |
|
|||||
Матрица будет транспонированной (по отношению к исходной |
А aij m n ) и обозначается |
A Т , |
|||||||||||||
если ее столбцы служат строками матрицы A , а строки – столбцами: |
|
|
|
|
|||||||||||
|
3. Системы координат и линейные преобразования |
|
|
|
155 |
|||||
a11 |
a12 |
a1n |
|
|
a11 |
a 21 |
a m1 |
|
||
|
|
|
|
|
A Т |
|
|
|
|
|
A a 21 |
a 22 |
|
a 2n |
; |
a12 |
a 22 |
|
a m2 |
||
|
|
|
|
|
|
|
|
|
|
|
|
a m2 |
|
|
|
|
a 2n |
|
|
|
|
a m1 |
a mn |
|
|
a1n |
|
a mn |
||||
или в сокращенной записи A |
aij |
m n ; A Т a ji |
n m . |
|
|
|
|
|
||
Симметричная квадратная матрица тождественна своей транспонированной матрице, т.е. в этом случае справедливо тождество A A Т .
В свою очередь матрицы могут быть элементами другой матрицы. Матрица, составленная из других матриц, известна как клеточная или квазиматрица:
A |
A |
A |
|
||
|
A 11 |
A 12 |
A 1n |
||
A |
21 |
22 |
|
2n . |
|
|
|
|
|
|
|
|
|
A |
A |
|
|
A |
|
||||
|
m1 |
m2 |
|
mn |
|
Если в квазиматрице все элементы, кроме диагональных, равны нулю, она преобразуется в
квазидиагональную: |
|
|
|
|
|
A11 |
0 |
|
0 |
|
|
|
0 |
A |
|
0 |
|
A |
|
22 |
|
|
. |
|
|
|
|
|
|
|
0 |
0 |
|
A |
|
|
|
|
|||
|
|
|
|
mn |
|
Кодиагональная и треугольная матрицы в этом случае будут квазидиагональной и квазитреугольной соответственно.
3.2.2. Операции с матрицами. Математические операции с матрицами сводятся к операциям с их элементами. Матрицы можно складывать, умножать на скаляр, умножать на вектор (представленный в виде матрицы-столбца), а также умножать одну матрицу на другую. Делить матрицы одна на другую нельзя.
Складывать одну матрицу с другой можно только если их размеры одинаковы. В этом случае суммой
двух матриц A aij |
m n и B bij |
m n будет матрица С cij |
m n |
того же размера, каждый элемент |
|||||||||
которой равен сумме соответствующих элементов матриц A и B : cij aij |
bij ; i 1,2,...,m ; |
j 1,2,...,n . |
|||||||||||
|
|
|
6 |
4 |
2 |
|
3 |
1 |
2 |
|
|
|
|
Пример 3.1. В результате сложения матриц A |
3 |
8 |
1 |
и B |
2 |
4 |
1 |
получим матрицу С , равную: |
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
3 |
|
|
|
|
|
|
|
|
5 |
2 |
|
1 |
4 |
|
|
|
|
||
9 |
5 |
4 |
|
|
|
С A B 5 12 |
0 . |
|
|
4 |
|
6 |
6 |
|
Сложение матриц обладает свойством коммутативности (от перестановки матриц их сумма не меняется) и подчиняется сочетательному закону:
156 |
3.2. Сведения о матрицах, необходимые для решения задач формообразования поверхностей деталей |
A B B A ;
A B С A B С .
Умножение матрицы на скаляр p равносильно умножению всех ее элементов на это число: bij p aij ;
i 1,2,...,m ; |
j 1,2,...,n . |
Действие вычитания в алгебре матриц определяется как сложение двух матриц, одна из которых умножена на скаляр p 1 .
При умножении двух матриц каждый элемент матрицы произведения С равен сумме произведений элементов k ой строки матрицы A на соответствующие элементы j го столбца матрицы B
n
(3.1) сik ai1b1k ai2b2k ... ainbnk aijb jk . j 1
Из этого следует, что две матрицы могут быть перемножены лишь в случае, когда число столбцов первой (левой) равно числу строк второй (правой). Если размер первой матрицы m n , а второй n p , то матрица
произведения С будет иметь размер m p . В общем случае A B B А (если существуют оба
произведения), т.е. операция умножения матриц не обладает свойством коммутативности. Поэтому следует оговаривать порядок перемножения матриц (например, умножим матрицу B слева на матрицу A ).
Пример 3.2. Требуется умножить матрицу B |
слева на матрицу A : |
|
|
|
|
|
|
|
|||||||||||
A |
3 |
1 |
; |
B |
5 |
2 |
; |
С A B |
|
3 5 1 4 |
3 2 1 3 |
|
19 9 |
. |
|||||
|
|
2 |
4 |
|
|
|
|
4 |
3 |
|
|
|
|
|
|
|
|
26 16 |
|
|
|
|
|
|
|
|
|
|
|
2 5 4 4 2 2 4 3 |
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
Аналогично перемножаются прямоугольные матрицы с согласованным числом строк и столбцов:
3 |
2 |
1 |
|
|
5 |
4 |
|
3 5 2 1 1 3 |
3 4 2 4 1 2 |
20 |
22 |
|
||||||||
|
B |
|
|
|
|
|
||||||||||||||
A |
4 |
1 |
3 |
|
; |
1 |
4 |
|
; |
С A B |
4 |
5 |
|
|
|
30 |
26 |
|
. |
|
|
2 3 |
|
|
|
|
|
|
1 1 3 3 4 4 1 4 3 2 |
|
2 2 |
|
|||||||||
|
|
|
|
|
3 |
2 |
3 2 |
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Умножение матрицы на вектор является частным случаем перемножения прямоугольных матриц. Умножение производится в порядке, определяемом уравнением (1). В этом случае векторы записываются в виде матрицы-столбца:
|
|
|
|
|
|
|
|
|
|
n |
|
|
|
|
|
|
|
|
|
|
|
a1 j Х j |
|
a11 |
a12 |
a1n |
|
Х1 |
|
j 1 |
|
||||
|
|
|
|
|
|
|
Х2 |
|
|
n |
|
С A X a21 |
a22 |
|
a2n |
|
|
|
a2 j Х j |
. |
|||
|
|
|
|
|
|
|
|
|
j 1 |
|
|
|
a m2 |
|
|
|
|
Хn |
|
|
|
|
|
am1 |
amn |
|
|
|
n |
|
|||||
|
|
|
|
|
|
|
|
|
|
amj Х j |
|
|
|
|
|
|
|
|
|
|
j 1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
3 |
5 |
|
|
|
|
|
|
|
|
|
|
8 |
|
|
справа на вектор X 19i 12j 4k . |
|||||
Пример 3.3. Рассмотрим операцию умножения матрицы A 2 |
1 |
|
|||||||||
|
|
|
9 |
|
|
|
|
|
|
|
|
|
|
4 |
2 |
|
|
|
|
|
|
|
|
3. Системы координат и линейные преобразования |
157 |
Вектор X перепишем в виде столбцовой матрицы
19
Х 12 19 12 4 Т .
4
Тогда
|
1 3 |
5 |
|
19 |
|
1 19 3 12 5 4 |
|
75 |
||||||
С A X |
2 |
8 |
1 |
|
12 |
|
|
2 19 8 12 1 4 |
|
|
138 . |
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
4 |
9 |
2 |
|
|
4 |
|
|
4 19 9 12 2 4 |
|
192 |
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Полученную матрицу-столбец снова можно записать в векторной форме: С 75i 138j 192k .
Произведение матриц подчиняется сочетательному и распределительному законам:
A B С A B С A B С ;
С A B С A С B ;
A B С A С B С ,
но
A B С С A B .
Втеории формообразования поверхностей деталей обычно приходится выполнять операции с квадратными матрицами. С квадратной матрицей связано понятие определителя и обратной матрицы.
Определитель матрицы составляется из ее элементов при неизменном их расположении и называется
модулем матрицы:
|
|
|
|
|
a11 |
a12 |
a1n |
|
|
Det A |
|
A |
|
|
a 21 |
a 22 |
a 2n |
. |
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
a n1 |
a n2 |
|
a nn |
|
Между матрицей и определителем существует принципиальное различие. Запись определителя в виде упорядоченной таблицы только внешне напоминает квадратную матрицу. Определитель – это число, а запись его в виде таблицы – только удобная форма, позволяющая по известным правилам вычислять его значения.
Для квадратной матрицы A обратной матрицей будет квадратная матрица A 1 того же порядка, обладающая свойством:
A A 1 A 1 A Е ,
где Е – единичная матрица того же порядка. Решение матричного уравнения
A X D |
(3.2) |
можно получить, умножив обе части этого равенства на матрицу A 1 : A 1 A Х A 1 D , но посколькуA 1 A E , следовательно, Х A 1 D .
Таким образом решение матричного уравнения (2) сводится к нахождению обратной матрицы A 1 .
158 |
3.2. Сведения о матрицах, необходимые для решения задач формообразования поверхностей деталей |
Для заданной матрицы A обратная матрица A 1 существует лишь в случае, когда исходная матрица не является особенной, т.е. определитель матрицы не равен нулю: Det A 0 .
Известно много методов нахождения матрицы, обратной заданной. Остановимся на двух из них. Обратную матрицу можно получить путем деления всех элементов присоединенной (союзной) матрицы на
определитель исходной матрицы. Присоединенная матрица получается путем транспонирования матрицы, составленной из алгебраических дополнений элементов исходной матрицы.
Элементы обратной матрицы равны
|
|
|
|
|
|
|
|
aij-1 |
|
Aji |
|
, |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Det A |
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
где Det A – определитель матрицы A ; |
|
|
|
в определителе Det A . |
|
|||||||||||||
Aji – алгебраическое дополнение элемента aij |
Det A строки и |
|||||||||||||||||
Алгебраическое дополнение Aji получается путем вычеркивания в определителе |
||||||||||||||||||
столбца, которые проходят через этот элемент. |
Так алгебраическим дополнением |
элемента a 22 в |
||||||||||||||||
определителе пятого порядка |
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
a11 |
a12 |
|
a13 |
a14 |
a15 |
|
|
|
||||
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
a 21 |
a 22 |
a 23 |
a 24 |
a 25 |
|
|
|
|||||
|
A |
|
|
|
|
a31 |
a32 |
a33 |
a34 |
a35 |
|
|
|
|||||
|
|
|
||||||||||||||||
|
|
|
|
|
|
a 41 |
a 42 |
a 43 |
a 44 |
a 45 |
|
|
|
|||||
|
|
|
|
|
|
a51 |
a52 |
a53 |
a54 |
a55 |
|
|
|
|||||
будет определитель четвертого порядка |
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
a11 |
a13 |
a14 |
a15 |
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
A |
|
|
a 21 |
a 23 |
a 24 |
a 25 |
|
. |
|
|
|
|||
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
a 41 |
a 43 |
a 44 |
a 45 |
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
a51 |
a53 |
a54 |
a55 |
|
|
|
|
|
|||
Применение рассмотренного способа нахождения обратной матрицы оправдано в случаях, когда исходная матрица имеет порядок не выше четвертого. Это ограничение вызвано тем, что при более высоком порядке исходной матрицы объем вычислительной работы резко увеличивается.
Другой способ нахождения обратной матрицы заключается в последовательном вычислении обратной матрицы путем подбора при помощи единичной матрицы. Записав рядом с заданной матрицей единичную матрицу, производим сложение строк, предварительно подобрав множители так, чтобы на месте заданной матрицы получить единичную. В этом случае на месте единичной матрицы будет искомая обратная матрица.
Пример 3.4. Вычислить матрицу, обратную матрице четвертого порядка
2 |
3 |
11 |
5 |
|
|
|
|
A 1 |
1 |
5 |
2 . |
2 |
1 |
3 |
2 |
|
1 |
3 |
|
1 |
4 |
||
|
|
|
|
Рядом с заданной матрицей A запишем единичную матрицу |
E такого же порядка |
||

3. Системы координат и линейные преобразования |
159 |
|||||
2 |
3 11 5 |
|
1 0 0 |
0 |
||
|
|
|
|
|
|
|
1 |
1 |
5 |
2 |
и |
0 1 0 |
0 . |
2 |
1 |
3 |
2 |
|
0 0 1 |
0 |
|
1 |
3 |
|
|
|
|
1 |
4 |
|
0 0 0 |
1 |
||
|
|
|
|
|
|
|
Ко второй, третьей и четвертой строкам обеих матриц прибавим их первую строку, умноженную: на 1 – для второй строки, на 1 – 2
для второй строки и на 1 – для четвертой строки.
2
Первая строка каждой матрицы остается неизменной. Получим
2 3 |
11 |
|
5 |
|
1 |
0 |
0 |
0 |
|||||||||||||
|
|
|
1 |
|
1 |
|
1 |
|
|
|
|
1 |
|
|
|
|
|||||
0 |
|
|
|
|
|
|
|
|
|
1 |
0 |
0 |
|||||||||
2 |
2 |
2 |
и |
2 |
|||||||||||||||||
|
0 |
|
|
|
|
|
|
|
|
|
1 |
0 |
. |
||||||||
|
2 |
8 |
3 |
|
|
|
1 |
0 |
|
||||||||||||
|
|
1 |
|
5 |
|
|
3 |
|
|
|
1 |
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
0 |
0 |
|
|
|||||||||
0 |
2 |
2 |
|
|
|
|
|
|
|
|
2 |
1 |
|||||||||
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|||||||||
Теперь к первой, третьей и четвертой строкам полученных матриц прибавим их вторую строку, умноженную: на 6 – для первой строки, на –4 – для третьей строки и на –1 – для четвертой строки. Имеем
|
|
|
|
2 0 |
|
|
8 |
|
|
2 |
|
2 |
|
|
|
6 0 0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
1 |
|
|
|
1 |
|
|
|
1 |
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
и |
|
|
|
|
|
|
|
|
|
1 0 0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
2 |
|
|
|
2 |
|
|
|
2 |
|
|
|
|
|
|
4 1 0 |
. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||
|
|
|
|
|
0 0 |
|
|
6 |
1 |
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||
|
|
|
|
0 0 |
|
|
2 |
2 |
|
|
|
|
|
0 |
|
|
|
|
|
1 0 |
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
К первой, второй и четвертой строкам этих матриц прибавим их третью строку, умноженную: на |
4 |
|
|
|
|
|
– для первой строки, на – |
1 |
– |
||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
12 |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
3 |
|
|
|
|
|
|
|
|
|
||||
для второй строки и на – |
1 |
– для четвертой строки. Приходим к такому промежуточному результату |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||||||||||||||||
3 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
2 |
|
|
|
2 |
|
|
|
4 |
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||
|
|
|
|
2 |
|
0 |
|
|
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0 |
|
|
|
|
|
||||||||||||||||
|
|
|
|
|
|
|
|
3 |
|
|
|
|
3 |
|
|
|
3 |
|
|
|
3 |
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||
|
|
|
|
0 |
|
|
|
0 |
|
|
5 |
|
|
|
и |
|
7 |
|
|
|
4 |
|
|
|
|
1 |
|
|
|
|
|
0 |
|
|
|
|
|
||||||||||||||||||||||||||
|
|
|
|
|
|
2 |
|
|
6 |
|
|
12 |
|
|
12 |
|
|
3 12 |
|
|
|
|
. |
|
|
|
|
|
|||||||||||||||||||||||||||||||||||
|
|
|
|
0 0 |
|
|
1 |
|
|
|
|
|
|
1 |
|
|
4 1 |
|
|
|
|
0 |
|
|
|
|
|
||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
7 |
|
|
|
|
|
|
|
1 |
|
|
|
1 |
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||
|
|
|
|
0 |
|
0 |
|
|
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
||||||||||||||||||||
|
|
|
|
|
|
|
|
3 |
|
|
|
|
3 |
|
|
|
3 |
|
|
|
3 |
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||
К первой, второй и третьей строкам этих матриц прибавим их четвертую строку, умноженную: на |
2 |
|
– для первой строки, на |
|
5 |
– |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
28 |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
7 |
|
|
|
|
|||||||||
для второй строки и на |
3 |
|
– для третьей строки. Это позволяет получить |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||
7 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
4 |
|
|
|
|
4 |
|
|
|
|
|
|
10 |
|
|
|
2 |
|
|
|
|||||||||||||||||||
|
|
|
|
|
2 0 |
|
0 |
|
|
0 |
|
|
|
7 |
|
|
|
|
7 |
|
|
|
|
|
|
7 |
|
|
|
7 |
|
|
|
|
|||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
9 |
|
|
39 |
|
|
|
|
|
1 |
|
5 |
|
|
|
|
|
|
|||||||||||||||||||||||
|
|
|
|
|
0 |
|
|
|
|
|
|
0 |
|
|
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
14 |
|
28 |
|
|
|
|
7 |
|
28 |
|
|
|
|
||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
6 |
|
|
|
|
|
|
и |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||
|
|
|
|
|
0 0 |
|
|
|
0 |
|
6 |
|
|
|
|
|
|
27 |
|
|
|
|
6 |
|
|
|
3 |
|
|
|
|
|
|
||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
7 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
0 |
|
0 |
|
|
|
|
7 |
|
|
|
|
|
|
7 |
|
|
|
|
7 |
|
|
|
7 |
|
|
|
|
|
||||||||||||||||||||||||||||
|
|
|
|
|
0 |
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
3 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
3 |
|
|
|
|
3 |
|
|
|
|
|
|
3 |
|
1 |
|
|
|
|
|
|
||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
Чтобы на месте исходной матрицы получить единичную матрицу, достаточно умножить: первую строку на |
1 |
, вторую строку на –2, |
||||
|
||||||
|
|
|
|
2 |
|
|
третью строку на |
1 |
и четвертую строку на |
3 |
. Получим |
|
|
|
|
|
||||
6 |
7 |
|
|
|
||