

3832
.pdfПоскольку система имеет одну неколебательную степень свободы, которая несу-
щественна, можно записать дифференциальное уравнение, описывающее поведение этой электромеханической системы, в виде
|
|
|
|
2 |
|
|
|
|
|
||
|
|
|
d |
|
x |
|
|
dx |
|
||
m |
|
b |
cx F |
|
|||||||
|
2 |
dt |
|
||||||||
|
|
|
dt |
|
|
(2.14) |
|||||
|
|
di |
|
|
|
|
|
|
|||
L |
|
Ri u |
|
|
|||||||
dt |
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|||
В (2.14) обозначено:m |
m1m2 |
– приведенная масса системы; m1, m2 |
– массы |
||||||||
m1 m2 |
|||||||||||
|
|
|
|
|
|||||||
реактивной и корпусной частей; x1, x2 – координаты реактивной и корпусной частей, от-
считываемые от положения равновесия; x=x2-x1 – относительная координата; b –
коэффициент сопротивления демпфера; с – коэффициент жесткости пружины; i – сила то-
ка; L – индуктивность обмотки; R – электрическое сопротивление обмотки; u – напряже-
ние, подводимое к обмотке: F – электромагнитная сила притяжения.
В положении статического равновесия x=0. Сила притяжения электромагнита F
= W/ x, где W 1 Li2 – потенциальная энергия магнитного поля. Индуктивность обмот-
2
ки при переменном воздушном зазоре магнитопровода может быть аппроксимирована вы-
ражением
L0 |
|
L |
|
(1 x / x0 ) |
(2.15) |
где – коэффициент, учитывающий рассеяние магнитного потока; x0 – начальный воз-
душный зазор. Тогда
|
|
|
|
|
F |
|
|
|
L i2 |
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
0 |
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
2 x0 (1 x / x0 )2 |
|
|
|
(2.16) |
||||||||||||
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
i |
|
|
b |
|
|
|
|
|
|
|
R |
|
L0 |
|
|||
Обозначив |
x / x0 |
|
|
|
|
|
|
|
c |
|
|
|
, |
, запишем |
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
, |
1 , |
2m , |
|
|
m |
|
, |
L0 |
2 mx02 |
||||||||||||
|
|
|
|
|
|||||||||||||||||
(2.14) с учетом (2.15) и (2.16) в виде |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
2 |
|
2 |
|
|
|
|
|
|||||
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
(2.17) |
|||||||
|
|
|
|
|
|
(1 ) u |
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
Получена система нелинейных параметрических уравнений, которую для анализа и синтеза систем автоматического управления целесообразно линеаризовать. Здесь возмож-
ны два подхода. Во-первых, можно рассматривать систему в виде звена «вход-выход» без
измерения и управления промежуточными координатами, в частности, током вибровозбу-
81

дителя. В этом случае достаточно линеаризовать, например методом малых отклонений,
систему (2.17). Во-вторых, система может быть структурирована в соответствии с коорди-
натами «вход-выход» отдельных, образующих ее элементов и в этом случае модель пре-
доставляет возможность управлять промежуточными координатами, что, в ряде случаев,
предпочтительней.
В первом случае, рассматривая малые отклонения переменных , , u от их значений 0, 0, u0 в установившемся режиме, из (2.17), отбрасывая величины высших по-
рядков малости, имеем
2 |
|
|
|
|
|
|
T1 |
2 T1 |
Kk |
|
(2.18) |
||
T K |
|
u. |
|
|||
oc |
|
|
||||
m |
|
|
|
|
|
|
где Km |
1 |
,Tm |
Km – коэффициент передачи и постоянная времени электро- |
(1 0 ) |
магнита; Kk |
2 |
0 |
, T1 |
1 |
|
|
b |
|
|
|
|
||
|
|
|
, |
|
– коэффициент передачи, постоянная времени, и |
||||||||
|
|
|
|
||||||||||
|
2 |
|
|
||||||||||
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|||
коэффициент затухания механической системы; K |
oc |
|
0 |
– коэффициент электроме- |
|||||||||
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
1 0 |
||
ханической связи (внутренней обратной связи).
В установившемся режиме 0 =1, 0 =i/2.
Для получения соответствующих второму случаю дифференциальных уравнений разложим нелинейности (2.15) и (2.16) в ряд Тейлора, удерживая только линейные члены разложения. Тогда
L |
L0 |
|
L0 |
|
; |
|
|
2 |
|||
|
|
(1 0 ) |
(2.19) |
||
|
|
|
|
|
|
F |
|
|
|
L |
|
|
|
|
|
|
|
|
|
|
|
|
i2L |
|
|
|
|
|
|
|
|
|
|
|
L i |
|
|
|
i |
|
||||||||
|
|
|
|
|
|
|
|
|
|
0 |
|
|
|
|
|
|
|
|
|
|
|
|
0 0 |
|
|
|
|
|
|
0 0 |
|
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
(1 |
|
3 |
|
|
|
|
) |
2 |
|
||||||||||||||||||||
|
|
|
|
|
|
|
|
2 x (1 x / x ) |
|
) |
|
|
|
|
|
|
x (1 |
|
. |
(2.20) |
||||||||||||||||||||||||||||
|
|
|
|
|
|
|
0 |
|
|
|
|
|
|
|
0 |
|
|
|
|
|
|
|
|
|
|
|
|
0 |
|
|
|
|
|
|
|
|
|
0 |
|
0 |
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
Тогда для малых отклонений (2.14) можно записать в виде |
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
T |
2 |
|
d2 |
|
T |
d |
K |
|
i; |
|
|
|
|
|
|
||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
k |
|
|
|
|
|
|
|||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
dt |
|
2 |
|
dt |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
d |
|
|
. |
|
|
|
|
|
(2.21) |
|||||||||
|
|
|
|
|
|
|
|
|
|
|
T |
|
|
d i |
i K |
|
|
u T |
|
, |
|
|
|
|
|
|
|
|||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
m |
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
m |
dt |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
d |
|
|
dt |
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
где |
|
|
|
|
|
|
, |
|
|
|
|
bx |
|
|
|
|
|
, |
|
|
|
|
|
|
|
|
|
i0L0 |
|
|
|
|
|
|
- постоянные времени и коэффи- |
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
x0 (1 |
|
0 ) |
2 |
|
|
|
||||||||||||||||||||||
|
|
|
mx0 |
|
|
|
|
|
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||
T |
|
|
|
|
T2 |
|
|
|
|
|
|
|
|
|
|
|
|
Kk |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
2 |
L0 |
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
1 |
|
cx |
|
|
i2 L |
|
|
cx |
|
|
|
i0 |
|
|
|
|
|
|
cx0 |
|
|
i0 L0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
0 |
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
3 |
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
0 |
|
(1 0 )3 |
|
|
|
0 |
|
(1 0 )3 |
|
|
|
|
|
|
|
(1 0 ) |
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
82 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||

|
|
|
|
|
|
|
L0 |
|
0 |
|
|
|
циент передачи дифференциального уравнения второго порядка; Tm |
1 |
|
, |
|||||||||
|
(1 0 ) |
2 |
||||||||||
|
|
|
|
|
|
R |
|
|
||||
K |
|
|
1 |
– постоянная времени и коэффициент передачи дифференциального уравнения |
||||||||
m |
R |
|||||||||||
|
|
|
|
|
|
|
|
|
|
|||
первого порядка (обмотки электромагнита); Td |
L0 0 |
– постоянная времени диф- |
||||||||||
R(1 0 )2 |
||||||||||||
ференцирования гибкой внутренней обратной связи. Обозначив bT1 , первое уравне-
2m
ние системы (2.21) можно записать в форме, соответствующей первому уравнению систе-
мы (2.18).
В заключение необходимо заметить, что определение динамических свойств объектов с помощью дифференциальных уравнений может быть по-
ка успешно выполнено только для сравнительно простых объектов. Как пра-
вило, в редких случаях можно при небольшой затрате времени составить достаточно точное дифференциальное уравнение объекта.
2.2.2. Передаточные функции объектов и элементов
систем автоматического управления с сосредоточенными параметрами
Рассмотрим общий случай неоднородного дифференциального уравне-
ния
|
dn y |
|
|
|
|
dn 1 y |
|
|
|
dy |
|
|
|
|
||||
a |
|
|
a |
|
|
|
|
a |
|
|
... a |
|
y |
|
||||
|
|
|
|
dtn 1 |
|
|
|
|||||||||||
n dtn |
|
|
n 1 |
|
|
|
|
dt |
|
0 |
, |
(2.22) |
||||||
|
|
dm x |
|
|
|
|
dm 1x |
|
|
|
dx |
|
|
|||||
b |
b |
...b |
b x |
|
||||||||||||||
dtm |
|
|
|
|
|
|||||||||||||
|
m |
|
|
m 1 dtm 1 |
|
|
1 dt |
|
|
0 |
|
|||||||
где коэффициенты ai и bj (i=0,1,…,n; j=0,1,…, m) могут быть функциями вре-
мени.
Обозначая через D оператор дифференцирования по времени, т.е.:
D |
d |
, D2 |
d2 |
,....,Dn |
dn |
, |
(2.23) |
|
dt |
dt2 |
dtn |
||||||
|
|
|
|
|
выходную переменную в (2.22) можно представить в виде:
83
|
|
b Dm b |
|
Dm 1 .... b D b |
|
|
||||||||
y( D) |
m |
|
|
|
m 1 |
|
|
|
1 0 |
x(D), |
(2.24) |
|||
a |
|
|
|
|
Dn 1 ... a |
|
||||||||
|
|
Dn a |
|
D a |
|
|
||||||||
|
|
n |
|
|
|
n 1 |
|
|
1 |
0 |
|
|
|
|
где функция |
|
|
|
|
|
|
|
|
|
|
|
|
||
W( D) |
y( D) |
|
b Dm b |
|
Dm 1 |
.... b D b |
|
|||||||
|
|
|
m |
|
m 1 |
|
|
|
1 0 |
(2.25) |
||||
x( D) |
a |
|
|
Dn 1 |
... a |
D a |
||||||||
|
|
Dn a |
n 1 |
|
||||||||||
|
|
|
|
|
|
n |
|
|
|
1 |
0 |
|
||
является дробно-рациональной функцией от оператора дифференцирования
D и называется передаточной функцией эвена или системы. Таким образом,
передаточная функция устанавливает зависимость выходной переменной y от входной переменной x в операторной форме:
y(D) W(D)x( D), |
(2.26) |
соответствующей (1.1), т.е. определяющей оператор системы.
Преобразование (2.23) или D-преобразование, и полученное с его по-
мощью уравнение (2.24) или (2.26), несмотря на некоторую формальность процедуры, имеет в своей основе прямое преобразование Лапласа, обозна-
чаемое L[ ], и широко используемое в теории автоматического управления для упрощения расчетов и проектирования систем. Для этой цели каждой функции времени t, входящей в дифференциальное уравнение, сопоставляет-
ся функция другого переменного s = с+j. Чтобы подчеркнуть соответствие изображения F(s) своему оригиналу f(t), для их обозначения обычно выби-
рают одинаковые буквы (для изображения - заглавные), а также применяют значок в виде стрелки:
f (t ) F( s ).
При этом уравнения динамики записывают не через оригиналы функ-
ций f(t), а в виде изображений функций F(s), получаемых с помощью инте-
грала вида:
|
|
L[ f (t )] F( s) f (t )e stdt. |
(2.27) |
0 |
|
Преобразование (2.27) или прямое преобразование Лапласа, справедли-
84
во для кусочно-непрерывных функций, определенных при t>0 и принимае-
мых равными нулю при t<0.
Покажем соответствие преобразований (2.23) и (2.27) для чего опреде-
лим преобразование по Лапласу производной функции f(t). В соответствии с
(2.27) имеем:
|
df (t ) |
df (t ) |
|
st |
|
st |
|
|
|
st |
|
|
||||
|
|
|
|
|
|
|
||||||||||
L |
|
|
|
|
|
|
e |
|
dt e |
|
f (t ) |
0 |
s f (t )e |
|
dt |
|
dt |
dt |
|
|
|
|
|||||||||||
|
|
|
0 |
|
|
|
|
|
|
0 |
|
. |
(2.28) |
|||
e s f ( ) e s 0 |
f (0 ) sF( s ) sF( s ) f (0 ) |
|
||||||||||||||
Таким образом, дифференцированию оригинала соответствуют умно-
жение изображения на s и вычитание начального значения f(0).
Аналогичным образом легко показать, что интегрированию оригинала соответствует деление изображения на s:
t |
|
F( s) |
|
|
|
|
|
||
|
|
|
|
|
|
f (t )dt |
. |
(2.29) |
|
0 |
|
s |
|
|
Применяя (2.28) к (2.22) при нулевых начальных условиях, получим:
W(s) |
Y(s ) |
|
b sm b |
|
sm 1 .... b s b |
B(s) |
|
|||||
|
|
|
m |
m 1 |
1 |
0 |
|
|
, |
(2.30) |
||
X(s) |
a |
|
|
|
|
|||||||
|
|
sn a |
n 1 |
sn 1 ... a s a |
A(s) |
|
||||||
|
|
|
|
n |
|
1 |
0 |
|
|
|
|
|
где A(s) и B(s) полиномы числителя и знаменателя передаточной функции.
Нетрудно видеть, что если в (2.25) заменить оператор дифференциро-
вания D на s то в результате будет получено выражение (2.30), называемое
передаточной функцией, под которой понимается отношение изображе-
ния выходной величины для объекта или устройства системы к изображе-
нию функции входной величины, полученных при нулевых начальных условиях
/8/.
Если входное воздействие представлено -функцией x(t)= (t), изобра-
жение Лапласа которой L[ (t)]=1, то из (2.30) следует, что изображение вы-
ходного сигнала y(t) = (t), где (t) – импульсная переходная функция систе-
мы (см. 2.3.2), есть передаточная функция звена или системы. Действитель-
85
но, в соответствии с (2.30) можно записать:
|
L y(t ) |
|
L (t ) |
|
|
||||
W( s ) |
|
L (t ) (t )estdt . |
(2.31) |
||||||
L |
|
|
|
|
|||||
|
|
0 |
|
||||||
|
|
x(t ) |
|
L |
(t ) |
|
|
||
Таким образом, передаточная функция есть преобразованная по Лап-
ласу импульсная переходная функция звена или системы, т.е реакция звена или системы на импульсное входное воздействие.
Анализ (2.30) показывает, что применение преобразования Лапласа к
(2.22) позволяет перейти от дифференциальных уравнений для оригиналов к алгебраическим уравнениям для их изображений. После решения алгебраи-
ческих уравнений с помощью обратного преобразования Лапласа L-1[ ]
1 |
|
1 |
c j |
|
st |
|
|
L |
[F(s)] f (t ) |
|
|
F(s)e |
|
ds, |
(2.32) |
|
|
||||||
|
|
2 j c j |
|
|
|
|
|
осуществляется переход от изображений к оригиналам. Под с в (2.32) пони-
мается абсцисса абсолютной сходимости, т.е. минимальное положительное значение параметра c при котором выполняется условие
|
|
|
|
|
|
|
f (t ) |
|
ectdt при f(t)=0 если t<0. |
|
|
|||
|
|
|
|
|
0 |
|
|
|
|
В соответствии с изложенным, уравнения (2.18) и (2.21) можно запи-
сать в виде
T12s2 2 T1s 1 (s ) Kk (s ),
(2.33)
Tm s 1 (s ) u(s ) Koc (s )
и
2 |
s |
2 |
T2s 1 ( s) Kk i( s ), |
|
|
||
T1 |
|
|
(2.34) |
||||
(T |
s 1) i( s) K |
|
|
|
|||
m |
u( s ) T s ( s). |
|
|||||
m |
|
|
|
d |
|
|
|
Соответствующие (2.33) и (2.34) динамические структуры объекта управления показаны на рис. 2.6.
Несмотря на внешнее сходство приведенных структурных схем, они
86

принципиально по-разному отражают динамические процессы в системе.
Объясняется это тем, что во втором случае изначально рассматривалась мо-
дель с раскрытой структурой /7/ причинно-следственных связей, учитываю-
щей динамические режимы двух элементов расчетной схемы: механической колебательной системы и электромагнитного вибровозбудителя, выходной величиной которого при-
u |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
нят ток. |
|
1 |
|
|
|
|
|
|
|
|
|
Kk |
|
|
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
2 |
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
Tms 1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
В результате можно |
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
T1 |
s |
|
2 T1s 1 |
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
отметить следующие раз- |
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Koc |
|
|
|
|
|
|
|
|
|
|
|
личия полученных струк- |
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
а) |
|
|
|
|
|
|
|
|
|
|
тур: |
||||||
u |
|
|
|
|
|
|
|
|
|
|
i |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
во-первых, обрат- |
|||
|
|
|
|
|
|
Km |
|
|
|
|
|
|
|
|
|
Kk |
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
T s 1 |
|
|
|
|
|
|
|
|
|
|
2 |
|
2 |
T2s 1 |
|
|
|
ная связь на рис. 2.6, б – |
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
T1 s |
|
|
|
|
|||||||||
|
|
|
|
|
|
|
m |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
гибкая (зависит от s, т.е. |
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Tds |
|
|
|
|
|
|
|
|
|
|
|
от времени) и, следова- |
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
б) |
|
|
|
|
|
|
|
|
|
|
тельно, в установившемся |
||||||
|
Рис. 2.6. Структурные схемы вибропривода: |
режиме она размыкается, |
|||||||||||||||||||||||||||
а – в первом, б – во втором расчетном случае
и установившееся откло-
нение тока определяется только отклонением питающего напряжения;
во-вторых, что наиболее важно, полученные линеаризованные зависи-
мости свидетельствуют о непостоянстве жесткости системы, которая опреде-
ляется не только коэффициентом жесткости пружины, но зависит также и от электрических параметров системы. Если учесть, что величину тока i0 можно изменять подмагничиванием, то можно сделать вывод о возможности незна-
чительного параметрического управления системой для обеспечения, напри-
мер, резонансного режима при изменяющихся параметрах нагрузки.
В заключение определим некоторые термины, используемые в связи с передаточными функциями.
1. Корни уравнения В(s) =0 называются нулями системы. 87
2.Корни уравнения А(s) = 0 называются полюсами системы.
3.Если уравнение А(s) = 0 имеет nk корней при s = k, то говорят, что полюс k имеет кратность nk.
4.Различие в степенях полиномов А(s) и В(s) называется относитель-
ной степенью.
5. Если т < п, то модель строго собственная. Это означает, что относи-
тельная степень положительна.
6. Если т = п, то модель бисобственная. Это означает, что относитель-
ная степень нулевая.
7.Если т ≤ п, то модель собственная.
8.Если т > п, то модель несобственная (или имеет отрицательную от-
носительную степень).
Реальные системы почти всегда строго собственные. Однако некоторые методы проектирования регуляторов приводят к бисобственным или даже к несобственным передаточным функциям. Чтобы быть реализуемыми, эти ре-
гуляторы обычно делаются бисобственными, например, дополняя А(s) со-
множителями типа ( is+1).
2.2.3. Передаточные функции объектов и элементов
систем автоматического управления с распределенными параметрами
Всовременных системах автоматического управления отдельные блоки
иагрегаты часто располагаются на значительных расстояниях друг от друга.
Для соединения элементов в единую систему широко применяются линии передачи сигналов чаще всего в виде двухпроводных или однопроводных линий, экранированных кабелей, фидеров и волноводов. У подобных элемен-
тов основные электрические характеристики - сопротивление, емкость, ин-
дуктивность - не сосредоточены в каких-то отдельных частях, а распределе-
ны непрерывно вдоль линии. Протяженность таких линий соизмерима с дли-
ной рабочей электромагнитной волны или значительно ее превосходит. Та88
кие элементы обычно называются элементами с распределенными парамет-
рами.
Поскольку длина электромагнитной волны обратно пропорциональна ее частоте (Гц), то, например, уже в диапазоне частот (3 102 - 3 104) МГц длинной можно считать линию, длина которой больше (1,0 – 0,01) м соответ-
ственно. Таким образом, строго говоря, почти все реальные элементы, вхо-
дящие в состав систем автоматического управления, также представляют со-
бою элементы с распределенными параметрами. Но в подавляющем боль-
шинстве случаев реальный элемент можно с достаточной степенью точности заменить упрощенной моделью - системой с сосредоточенными параметрами и идеальными линиями связи, в которых отсутствуют потери энергии и за-
паздывание при прохождении сигналов. Такая замена дает возможность оп-
ределить динамические характеристики элемента с достаточной точностью лишь в том случае, когда эквивалентное сопротивление всех линий связи достаточно мало по сравнению с эквивалентным сопротивлением соединяе-
мых ими деталей. При этом процессы изменения токов и напряжений в цепи теряют «волновой» характер и становятся чисто «колебательными», анализ их базируется на решении дифференциальных уравнений в полных произ-
водных /23/. Если же волновой характер процессов представляет основу по-
лезных функций цепи, либо существенно влияет на характеристики переда-
ваемого сигнала, соответствующую линию связи необходимо считать длин-
ной линией с распределенными (рассредоточенными) параметрами. Их ана-
лиз базируется на основе решений дифференциальных уравнений в частных производных.
Проводные линии связи, вне зависимости от их технической реализа-
ции описываются одними и теми же уравнениями. Рассматривая процессы в длинной линии с потерями, будем характеризовать ее /4/ следующими рас-
пределенными по длине параметрами: активным сопротивлением R, индук-
тивностью L, емкостью С и активной проводимостью G между проводами
89
линии, обусловленной наличием определенного конечного омического со-
противления их изоляции и промежутка между ними. В общем случае эти параметры могут быть распределены по длине линии неравномерно. Такие линии называются неоднородными. Если перечисленные параметры распре-
делены вдоль линии равномерно, то линия называется однородной. На прак-
тике в подавляющем большинстве случаев применяются только однородные длинные линии.
Напряжение и ток в каждом сечении однородной линии будут функ-
циями времени t и координаты сечения х: u = u(t,x), i = i(t,x). Условимся счи-
тать, что началу линии соответствует x=0, а концу – х = l, где l - полная длина
линии.
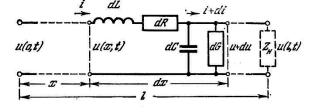
Для составления системы дифференциальных уравнений, описываю-
щих длинную линию, представим ее бесконечно малый отрезок длины dx уп-
рощенной моделью, изображенной на рис. 2.7.
|
|
|
|
|
|
Изменение напряжения между |
||||
|
|
|
проводами линии от сечения х до се- |
|||||||
|
|
|
чения х +dx произойдет из-за паде- |
|||||||
|
|
|
ния напряжения на активном сопро- |
|||||||
Рис. 2.7. Расчетная схема длинной линии |
тивлении Rdx и на индуктивности |
|||||||||
Ldx отрезка dx: |
|
|||||||||
|
|
|
|
|||||||
u(t,x dx) u(t,x) iRdx L |
i |
dx. |
(2.35) |
|||||||
|
||||||||||
|
|
|
|
|
|
|
|
t |
|
|
С другой стороны, с точностью до бесконечно малых второго порядка |
||||||||||
u(t,x dx) u(t,x) |
u |
dx. |
(2.36) |
|||||||
|
||||||||||
|
|
|
|
|
|
x |
|
|||
Таким образом, имеем |
|
|
|
|
|
|
|
|
||
|
u |
dx iRdx L |
i |
dx . |
(2.37) |
|||||
|
|
|
||||||||
|
x |
|
t |
|
||||||
Изменение тока, протекающего в линии между теми же сечениями, вы-
зывается утечкой тока через проводимость Gudx и током заряда емкости
90