

3832
.pdfтический регулятор, реализующий типовой закон регулирования. В автома-
тический регулятор входят различные усилители, а также измерительные и исполнительные элементы. Типовая схема системы автоматического регули-
рования, состоит из задающего устройства 1 (в том числе и программного типа), на вход которого поступает управляющее воздействие g(t); сравни-
вающих устройств I и II; усилительных элементов 2, 4, 5; исполнительного
|
= u |
1= u1 |
y(t) |
g(t) |
I |
II |
|
|
|
|
|
uз |
11 |
10 |
|
|
|
|
uос=xд(t) |
|
Регулятор |
Объект регулирования |
|
Рис. 1.11. Типовая схема системы автоматического регулирования
элемента 6; корректирующих устройств последовательного действия 3 и па-
раллельного действия 8; объекта регулирования, состоящего из технологиче-
ского агрегата 7 и измерительного элемента (датчика) 9. Все устройства сис-
темы соединяются друг с другом с помощью линий связи. Элемент блок-
схемы 8 с линией 10 образует внутреннюю обратную связь. За счет действия внутренней обратной связи на входе элемента 4 образуется сигнал
u1 1 uвх uос , (1.14)
где uвх – сигнал поступающий на элемент сравнения II с выхода блока 3, uос –
сигнал внутренней обратной связи, поступающий на элемент сравнения II с
выхода блока 8. При знаке минус в выражении (1.14) обратная связь является
отрицательной, т.е увеличение сигнала обратной связи приводит к возраста-
нию входного сигнала 1. При знаке плюс связь является положительной и с ростом сигнала обратной связи сигнал на входе элемента 4 уменьшается. Ли-
ния 11 представляет собой главную обратную связь системы. За счет дейст-
вия главной обратной связи в системе образуется сигнал ошибки, характери61
зующий точность работы всей системы регулирования, т. е.
u uз |
uос |
(1.15) |
где uз, uос – сигналы задающего устройства и |
главной обратной связи соот- |
|
ветственно. |
|
|
Сигнал разности задающего сигнала и сигнала обратной связи часто называют отклонением регулируемой величины от заданного значения или
рассогласованием. Если обратная связь осуществляет пропорциональную пе-
редачу сигнала, не изменяя его поведение во времени, то такую связь назы-
вают жесткой. При единичном коэффициенте пропорциональности ее назы-
вают единичной.
Если при передаче сигнала нарушается динамическая пропорциональ-
ность сигналов на входе и выходе элемента, включенного в цепь обратной связи (например, 8 и 9, рис. 1.11), за счет инерционности элемента, наличия у него дифференцирующих или интегрирующих свойств и т.д., то ее называют
гибкой обратной связью.
Если задающий сигнал g(t) изменяется по известному закону, либо та-
кое изменение осуществляет задающее устройство 1, то реализуется замкну-
тая система программного управления.
Другим частным видом замкнутых систем автоматического управления являются следящие системы, изменение задающего воздействия g(t) заранее не известно. Задающее воздействие поступает на систему извне и задачей системы является обеспечение слежения выходной величиной y(t) объекта за изменяющейся величиной g(t), так, чтобы выполнялось условие y(t) = g(t).
При невысоких требованиях к выполнению равенства задающего воз-
действия и выходной величины объекта могут применяться разомкнутые системы управления (рис. 1.12, а), или системы автоматического управления по возмущению (рис. 1.12, б), называемые также системами автоматиче-
ской компенсации. В последнее время широко используются комбинирован-
ные (рис. 1.12, в,г) и самонастраивающиеся (оптимальные) (рис. 1.12, д) сис62

темы автоматического управления.
|
|
|
|
|
|
|
|
|
|
КF |
|
|
g(t) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
Зд |
|
УУ |
|
ОУ |
y(t) |
|
|
|
|
||
|
|
|
|
|
|
|
|
|
||||
|
|
|
УУ |
|
ОУ |
|||||||
|
|
|
|
а) |
|
|
|
|||||
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
б) |
||||||
|
|
|
|
|
|
|
|
|
|
|||
f(t)
y(t)
|
|
|
|
|
|
|
|
|
|
|
|
|
КУ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
КF |
|
|
|
f(t) |
|
|
|
|
|
|
|
|
|
|
КF |
|
|
|
f(t) |
y(t) |
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
y(t) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
g(t) |
|
|
|
УУ |
|
|
ОУ |
|
|
g(t) |
|
|
|
|
|
|
УУ |
|
ОУ |
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
- |
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
- |
|
|
Д |
|
|
|
|
|
|
|
|
|
|
|
|
|
Д |
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
в) |
|
|
|
|
|
|
|
|
|
|
|
г) |
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
д)
Рис. 1.12. Системы автоматического управления: а — замкнутого цикла по отклонению; б) — замкнутого цикла по возмущению; в — комбинированного цикла
с компенсацией ошибки по возмущению; г — комбинированного цикла с компенсацией ошибки по управлению и возмущению; д – самонастраивающейся (оптимальной)
На рис. 1.12 обозначено: УУ – управляющее устройство, включающее исполнительное устройство и регулирующий орган; ОУ – объект управления
(регулирования); Д – датчик; КУ – элемент (компенсатор), компенсирующий ошибку от управляющего сигнала; КF - элемент (компенсатор), компенси-
рующий ошибку от возмущающего воздействия f(t).
63

1.5.3.Виды управляющих и возмущающих воздействий
Внешние воздействия, поступающие на элемент (звено) или систему автоматического управления со стороны внешней среды можно подразделить
на три группы /9/:
а) непрерывные (функции непрерывного аргумента) и дискретные (функции дискретного аргумента);
б) детерминированные и случайные;
в) одномерные и многомерные.
При анализе динамических процессов в системах автоматического ре-
гулирования в качестве сигналов управления или возмущения выбираются некоторые стандартные (типовые) сигналы /8/, при описании которых приня-
|
|
то, что они существуют |
|||
|
|
на интервале t ≥ 0 и |
|||
|
|
равны нулю при t < 0. |
|||
|
|
|
На рис. 1.13, по- |
||
|
|
казана форма наиболее |
|||
|
|
часто |
|
применяемых |
|
|
|
сигналов |
управления |
||
|
|
g(t). Сигнал g(t), изо- |
|||
|
|
браженный на |
рис. |
||
|
|
1.13, |
а), |
представляет |
|
Рис. 1.13. Виды типовых управляющих и возмущающих |
собой |
единичное |
сту- |
||
воздействий |
|
пенчатое воздействие |
|||
|
|
||||
g(t ) 1(t ) 1, |
t 0 . |
|
|
|
(1.16) |
К воздействию такого рода наиболее часто прибегают при оценке каче-
ства процессов регулирования. При оценке точности систем используют сиг-
налы управления, показанные на рис. 1.13, б,г. Если для сигналов управления справедливы соотношения
64
g(t ) g1t, |
t 0 , |
(1.17) |
то управляющее воздействие изменяется линейно (рис. 1.13, б).
Если
|
n |
|
|
g(t ) g0 |
g1t g2t giti , |
t 0, |
(1.18) |
i 0
то имеем степенной характер изменения управляющего воздействия (рис. 1.13, в). Для целого ряда систем автоматического регулирования типовым яв-
ляется гармонический (синусоидальный) сигнал
g(t ) g0 sin( 0t ), t 0, (1.19)
где gо - максимальное значение амплитуды воздействия; о - круговая часто-
та задающего воздействия. График g(t) для данного случая представлен на рис. 1.13, г).
Иногда при оценке качества и точности систем регулирования приме-
няют экспоненциальный сигнал управления (рис. 1.13, д): |
|
|
g(t ) g0e rt , |
t 0, |
(1.20) |
где r- показатель экспоненты.
Сигналы, представленные на рис. 1.13, е-к) наиболее часто применяют-
ся как сигналы возмущающих воздействий. Сигнал типа «сброс нагрузки» можно представить в виде графика, представленного на рис. 1.13, е, для ко-
торого справедливы соотношения:
f |
1 |
, |
0 t t |
1 , |
(1.21) |
f (t ) |
, |
t t1 |
|||
f2 |
|
|
|||
где f1>f2.
Сигнал типа «наброс нагрузки» определяется выражением (1.21), при условии f1<f2.
На многие объекты систем регулирования действуют периодические сигналы в виде треугольных импульсов (рис. 1.13, ж) или периодически по-
вторяющихся парабол (рис. 1.13, з). Для функции, изображенной на рис. 1.13,
65

ж, запишем
f(t ) f
1 2
|
4 |
|
|
|
|
|
|
|
|
|
2 |
|||
|
|
n |
1 |
|
(2n 1) t |
|
|
|||
cos |
|
|
|
||
|
|
||||
|
|
, |
(1.22) |
||
|
|||||
(2n 1)2 |
|
||||
|
|
|
|||
где f1 – амплитуда импульсов, – их длительность.
Для периодически повторяющихся парабол (рис. 1.13, з) имеем
|
|
|
|
|
|
|
|
|
|
2n t |
|
|
|||
|
|
|
|
|
|
|
|
cos |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
f (t ) |
f1 |
|
|
|
|
|
|
|
|
|
. |
(1.23) |
|||
|
|
|
|
|
|
|
|||||||||
|
|
2 |
|
n |
2 |
|
|
||||||||
|
|
6 |
|
|
n 1 |
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Если в качестве нагрузки используется лишь одна парабола, то
|
|
t |
2 |
, 0 |
t |
; |
f (t ) |
t |
|
||||
f1 |
|
|
t . |
(1.24) |
||
|
0, |
|
|
|
||
В ряде случаев в качестве типового возмущения используется периоди-
чески повторяющаяся ступенчатая функция с максимальным (или минималь-
ным) значениями f1 (см. рис. 1.13, и), т. е.
f ( t ) |
f1 1 2(t ) 2(t 2 ) 2(t 3 ) , |
(1.25) |
или синусоидальная функция (рис. 1.13, к) |
|
|
|
f(t) f0 sin f t , |
(1.26) |
где f0, f =2 /Тf – амплитуда и частота, Тf - период синусоидального возму-
щающего воздействия.
В ряде случаев, на вход системы управления наряду с регулярным воз-
действием поступает сигнал в виде флюктуаций, уровень которых может из-
меняться в широких пределах. Такие сигналы задаются в виде случайных функций времени (рис. 1.13, л).
На рис. 1.14 представлено внешнее воздействие (воздействия со сторо-
ны внешней среды – управляющее или возмущающее) в виде физически реа-
66

лизуемого -импульса, т.е. импульса бесконечно малой длительности,
имеющего большое значение в теории автоматического управления, что объясняется предоставляемой возможно-
стью разложения возмущений произвольной формы на -
импульсы.
Импульсной -функцией, впервые введенной в науку знаменитым английским физиком Дираком, называется функция, равная нулю всюду, кроме начала координат,
принимающая бесконечное значение в начале координат, и притом так, что интеграл от нее по любому интервалу, содержащему начало координат, равен единице:
(t ) 0 |
t 0, |
(0) , |
(1.27) |
|
|
|
|
(t )dt 1 |
0. |
(1.28) |
|
|
|
|
|
Функцию, обладающую такими свойствами, можно получить, например, как предел положительного прямоугольного импульса, имеющего единичную площадь, когда 0 (рис. 1.14).
Импульсную -функцию можно рассматривать как производную еди-
ничной ступенчатой функции (1.16). Действительно, на основании (1.28)
e |
|
0, |
t 0 |
(1.29) |
|
|
(t )dt |
|
1(t ) |
||
|
|
1, |
t 0 |
|
|
Дифференцируя (1.29), получим: |
|
|
|
||
|
|
d1(t ) |
|
||
|
(t ) |
|
|
1 (t ) |
(1.30) |
|
|
|
|||
dt
Следовательно, используя -функцию мы получаем возможность диф-
ференцировать разрывные функции и, кроме того, как будет показано далее,
эта функция позволяет достаточно просто определять временные и частотные характеристики звеньев или систем автоматического управления в том числе
67
и при произвольных входных воздействиях с помощью интеграла Дюамеля
(интеграла свертки).
КОНТРОЛЬНЫЕ ВОПРОСЫ
1.Укажите основные принципы автоматического управления.
2.Что такое регулирование «по отклонению»?
3.Что такое «комбинированное регулирование»?
4.Перечислите основные задачи автоматического управления.
5.Что такое оператор системы?
6.Назовите основные классификационные признаки систем автоматиче-
ского управления.
7.Что такое информация и каковы единицы измерения информации?
8.В чем отличие возмущающего воздействия от управляющего воздейст-
вия?
9.Перечислите основные элементы системы автоматического управле-
ния.
10.Что такое «обратная связь»? Перечислите виды обратных связей.
11.Назначение регулятора в системе автоматического регулирования.
12.В чем отличие управления от регулирования?
68
2. МАТЕМАТИЧЕСКИЕ ОСНОВЫ АНАЛИЗА ЭЛЕМЕНТОВ И
СИСТЕМ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ
Цель раздела – ознакомление с основами анализа и математическим описанием элементов и систем автоматического управления с непрерывным и дискретным временем.
После изучения раздела необходимо знать:
Понятие пространств сигналов и состояний. Формы представления мо-
делей систем.
Основные модели элементов и систем автоматического управления.
Понятие передаточной функции и его связь с оператором системы.
Способы представления моделей систем в пространствах состояния и сигналов.
Временные и частотные характеристики непрерывных и дискретных систем.
Определения устойчивости, управляемости, наблюдаемости, чувстви-
тельности и инвариантности систем автоматического управления.
После изучения раздела необходимо уметь:
Составлять модели динамических систем в форме дифференциальных
иразностных уравнений.
Определять передаточные функции непрерывных систем в пространст-
вах сигналов и состояний.
Рассчитывать основные характеристики систем.
Оценивать устойчивость, управляемость, наблюдаемость, чувствитель-
ность и инвариантность систем автоматического управления.
69
2.1.Основные понятия и определения
Математическое описание, необходимое для исследования процесса регулирования, осуществляется обычно с помощью дифференциальных, ин-
тегральных, разностных или алгебраических уравнений, которые, согласно данному выше определению, образуют оператор системы. Под математиче-
ской моделью элемента или системы будем понимать пару «оператор систе-
мы – модель внешних взаимодействий». Математическая модель системы или процесса отражает в той или иной мере свойства реальной системы, в
том числе ограничения, существующие в реальных условиях. Под взаимо-
действием системы со средой /7/ понимается рассмотрение причинно-
следственных связей системы управления со средой и выделением этих свя-
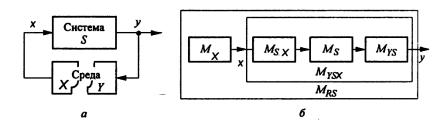
зей через переменные входа x и выхода y (рис. 2.1, а). Система оказывается звеном в искусственно разорванной цепи причинно-следственных отношений
"среда—система—среда".
Рис. 2.1. Взаимодействие системы со средой
В теории и расчетной практике объектами исследований оказываются модели собственно систем управления MS, модели систем со связями со средой MYSX и модели расширенных систем MRS (рис. 2.1, б) /7/. Модели MS
позволяют выявить свойства свободных движений автономных систем, MYSX
– свойства каналов передач от входов к выходам при отсутствии информации о переменных входа x(t), а модели MRS привлекаются для изучения вынуж-
денных движений переменных выхода у(t) при адекватных моделях воздей-
ствий.
Система называется автономной, если на нее не действуют внешние
силы, в том числе параметрического типа. Автономные системы, таким обра70