

3832
.pdfС u dx :
t |
|
|
|
|
|
|
|
|
|
i(t,x dx) i(t,x) Gudx C |
u |
dx. |
(2.38) |
||||||
|
|||||||||
|
|
|
|
|
|
|
x |
|
|
Или с точностью до бесконечно малых второго порядка |
|
||||||||
i(t,x dx) i(t,x) |
i |
dx, |
(2.39) |
||||||
|
|
||||||||
|
|
|
|
x |
|
||||
откуда |
|
|
|
|
|
|
|
|
|
|
i |
dx Gudx C |
u |
dx. |
(2.40) |
||||
|
x |
|
|||||||
|
|
t |
|
||||||
Сократив уравнения (2.37) и (2.40) на dx, получим систему двух линей-
ных дифференциальных уравнений в частных производных, описывающую процесс в длинной линии при действии на ее входе любого напряжения и при произвольной нагрузке на ее конце (выходе);
i |
|
|
|
u |
|
||
|
|
ix |
Gu C |
|
|
. |
(2.41) |
x |
|
|
|||||
|
|
|
t |
|
|||
u |
|
|
|
i |
|
|
|
|
ux |
Ri L |
|
|
|||
x |
|
|
|
|
|
||
|
|
|
t |
|
|||
Время t не входит явно в уравнения однородной линии (2.41). Поэтому процесс в ней при одном и том же входном напряжении протекает всегда одинаково, независимо от момента его начала. Это означает, что длинная ли-
ния представляет собой стационарную линейную систему. Следовательно, ее динамические свойства полностью определяются ее передаточной функцией
W(s). Для определения передаточной функции W(s) приложим ко входу ли-
нии напряжение, изменяющееся по показательному закону u(t,0) est , и бу-
дем искать решение системы уравнений (2.41) в виде
u(t,x) (s,x)e |
st |
|
(2.42) |
|
, . |
||
i(t,x) (s,x)est , |
|
||
|
|
|
|
где (s,x) и (s,x) - некоторые неизвестные функции, не зависящие от време-
ни. При этом учтем граничные условия в начале и конце линии:
91

u(t,0 ) est |
, |
|
|
(2.43) |
|
|
i(t,l ) |
. |
|
u(t,l ) R |
i(t,l ) L |
. |
|
|
|
|
|||
H |
H |
t |
|
|
|
|
|
|
Второе граничное условие выбрано из соображения, что длинные ли-
нии, применяющиеся в системах автоматического управления, обычно на-
гружены или чистым омическим сопротивлением, или последовательным со-
единением омического и индуктивного сопротивлений.
Подставляя выражения u(t,x), i(t,x) из (2.42) в уравнения (2.41), после сокращения на est получаем для определения функций (s,х) и (s, х) урав-
нения
x |
( s,x ) (Gu Cs ) ( s,x ) |
(2.44) |
|
. |
|
x ( s,x ) ( Ri Ls ) ( s,x ) |
|
|
Эти уравнения образуют систему двух обыкновенных линейных диф-
ференциальных уравнений с постоянными коэффициентами, зависящими от параметра s. Применяя обычный метод интегрирования систем линейных уравнений (см. также 2.3.2.) с постоянными коэффициентами, составляем ха-
рактеристическое уравнение:
|
|
(R Ls ) |
2 (R Ls)(G Cs) 0. |
(2.45) |
|
|
(G Cs) |
|
|||
|
|
|
|
||
Отсюда, вводя обозначение |
|
|
|
||
|
|
(s) |
|
, |
(2.46) |
|
|
(R Ls)(G Cs) |
|||
находим 1,2= (s). Этим двум корням характеристического уравнения (2.45)
соответствуют два частных интеграла системы уравнений (2.44):
1 |
(s,x ) e |
( s )x |
, 1 |
(s,x ) a1e |
( s )x |
, |
|
|
||
|
|
|
(2.47) |
|||||||
|
|
(s,x ) e ( s )x , |
|
(s,x ) a |
|
|
. |
|||
2 |
2 |
e ( s )x . |
|
|||||||
|
|
|
|
2 |
|
|
|
|
||
Для определения постоянных а1 и а2 подставим эти частные интегралы по очереди в любое из уравнений (2.44) и потребуем, чтобы оно обратилось в тождество относительно х. Тогда, полагая для краткости
92

(s) |
G Cs |
|
|
|
R Ls , |
(2.48) |
|||
|
||||
получим a1= - (s), а2 = (s). Таким образом, мы нашли два линейно независи-
мых частных интеграла системы уравнений (2.44). Общий интеграл этой сис-
темы уравнений определяется формулами
( s,x ) с1e |
( s )x |
с2e |
( s )x |
, |
|
|
|
|
|
|
|
(2.49) |
|||
( s,x ) [c e ( s )x c |
|
|
. |
||||
e ( s )x ]. |
|
||||||
|
1 |
|
2 |
|
|
|
|
Для определения постоянных интегрирования с1 |
и c2 воспользуемся |
||||||
граничными условиями (2.43). Подставляя в них выражения (2.42) и сокра-
щая на est , приведем эти условия к виду
( s,0 ) 1, ( s,l ) ( RH LH s ) ( s,l ) ZH ( s ) ( s,l ). |
(2.50) |
||||||||||||||||
Подставляя (2.49) в (2.50) получим следующую систему линейных ал- |
|||||||||||||||||
гебраических уравнений для определения с1 и c2: |
|
|
|
|
|
||||||||||||
с с |
|
|
1, |
|
|
|
|
|
|
|
|
|
|
|
(2.51) |
||
1 |
|
|
2 |
|
e ( s )l ] Z |
|
|
|
|
|
|
|
|
. |
|||
[c e ( s )l c |
H |
(s)[c e ( s )l c e ( s )l ] (s). |
|
||||||||||||||
1 |
|
|
|
2 |
|
|
|
|
1 |
2 |
|
|
|
|
|
||
Решая эту систему уравнений, находим с1 и c2: |
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
[1 ZH ( s ) ( s )]e ( s )l |
|
|
|
|
|
||||||
с1 |
|
|
|
|
|
|
|
|
|
|
, |
|
|||||
|
[1 ZH ( s ) ( s )]e |
( s )l |
[1 |
ZH |
( s ) ( s )]e |
( s )l |
(2.52) |
||||||||||
|
|
|
|
|
|
|
|
|
|
. |
|||||||
|
|
|
|
|
|
[1 ZH ( s ) ( s )]e ( s )l |
|
|
|
|
|
||||||
c |
|
|
|
|
|
|
|
. |
|
|
|||||||
2 |
|
[1 ZH ( s ) ( s )]e |
( s )l |
[1 |
ZH |
( s ) ( s )]e |
( s )l |
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
||||||
Передаточная функция однородной длинной линии W(s) в случае, ко-
гда выходной переменной является напряжение на конце линии и(t,l), на ос-
новании (2.42) будет равна
W(s) |
u(t,l ) |
|
|
(s,l )est |
(s,l ) c |
e ( s )l c |
e ( s )l . |
(2.53) |
|
u(t,0 ) |
est |
||||||||
|
|
1 |
2 |
|
|
||||
Подставляя сюда выражения (2.52) постоянных с1 и c2, получаем окон-
чательное выражение для передаточной функции W(s):
W( s ) |
2ZH |
( s ) ( s ) |
. |
(2.54) |
|
[1 ZH ( s ) ( s )]e ( s )l [1 ZH ( s ) (s )]e ( s )l |
|||||
|
|
|
|||
|
|
93 |
|
|
|

Выражение (2.54) передаточной функции W(s) показывает, что в общем случае однородная длинная линия представляет собой сложный динамиче-
ский элемент, обладающий, в зависимости от соотношения величин ее ос-
новных параметров R, L, C, G и вида нагрузки ZH(s), различными свойства-
ми. Проанализируем, как изменяется передаточная функция W(s) в зависимо-
сти от изменения вида нагрузки и выбора определенных сочетаний основных параметров линии.
Для изучения динамических свойств самой длинной линии, ни с чем не соединенной, следует предположить, что нагрузка на конце линии отсутству-
ет. Это равноценно случаю, когда сопротивление нагрузки бесконечно вели-
ко, т. е. RH = . Полагая в (2.54) RH = находим передаточную функцию длинной линии, рассматриваемой как изолированное звено автоматической системы:
W(s) |
2 |
|
1 |
sch (s)l. |
(2.55) |
|
e ( s )l e ( s )l |
ch (s)l |
|||||
|
|
|
|
Выбирая параметры длинной линии и нагрузку на ее конце соответст-
вующим образом, можно получить линию с желательными динамическими свойствами.
В системах автоматического управления обычно применяются только так называемые согласованные линии, т. е. такие линии, которые не дают от-
ражения прямого сигнала, приходящего к концу линии, от нагрузки. Линия становится согласованной, когда нагрузка ZH(s) выбирается равной волново-
му сопротивлению |
|
|
1 |
|
|
L |
линии: |
|
|
|
||||
d |
|
|
|
|
|
|
||||||||
|
|
( s ) |
s 0 |
|
C |
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
1 |
. |
|
||||
|
|
ZH (s ) RH |
LH s |
R Ls |
|
|
(2.56) |
|||||||
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
G Cs |
(s ) |
|
|||
Из этого равенства видно, что согласованности линии в общем случае можно добиться только при каком-нибудь одном значении s так как это ра-
венство не является тождеством относительно s. Поэтому для обеспечения
94

согласованности линии обычно пользуются переменным током определенной частоты 0 и сопротивление нагрузки выбирают из условия (2.56) при s = j 0.
В этом случае при передаче сигналов переменным током частоты 0 линия будет работать в режиме бегущей волны. Полагая (j 0 )= +j , получим
W( j 0 ) e l( j ) . (2.57)
Сигнал в такой линии распространяется со скоростью 0/ и ослабляет-
ся в е раз на единицу длины линии.
Полной согласованности линии при любом значении s можно добиться,
если выбрать ее параметры так, чтобы удовлетворялось условие RC=LG.
Действительно, в этом случае R/L=G/C, (s ) |
|
s 0 |
|
C |
и условие (2.56) прини- |
|||||||||
|
||||||||||||||
|
|
|||||||||||||
мает вид |
|
|
|
|
|
|
|
|
L |
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
R |
L s |
L |
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|||||||
H |
H |
C . |
|
|
|
|
|
(2.58) |
||||||
|
|
|
|
|
|
|
||||||||
Этому условию можно удовлетворить, приняв R |
L |
|
,L 0. При этом |
|||||||||||
|
|
|
|
|
|
|
|
|
|
H |
C H |
|||
выражение (2.54) для передаточной функции длинной линии примет вид
W ( s ) e l  RG e sl
RG e sl  LC . (2.59)
LC . (2.59)
Сигнал распространяется по такой линии без искажения со скоростью,
равной 1

 LC , и ослабляется в e
LC , и ослабляется в e RG раз на каждую единицу длины линии.
RG раз на каждую единицу длины линии.
Такие линии обычно применяются в виде реальных линий задержки.
Чтобы получить значительное время задержки сигнала, необходимо выбрать большую длину линии (десятки — сотни метров), что может привес-
ти к большим трудностям в выборе основных параметров линии, позволяю-
щих выполнить условия RC=LG. Кроме того, линия получается громоздкой.
Часто применяют непрерывную спиральную линию задержки, у которой изо-
лированный внутренний кабель оплетается спиральным экраном. Такая ли-
ния имеет значительные собственные индуктивность и емкость при сравни-
тельно короткой общей длине. Поэтому ослаблением амплитуды сигнала в
95
ней можно пренебречь (так как величины l, R, G будут малыми, а L и С -
большими).
2.2.4. Модели «вход-выход» дискретных систем. Z-преобразование
Так как входная переменная х(t) действует на дискретную систему только в определенные моменты времени tk (k = 0, ±1, =±:2, . . .), то ее выход-
ная переменная является функцией времени и значений x(tk) (k=0, ±1, ±2, . . .)
входной переменной /4/. Поэтому при анализе импульсных систем удобнее заменить непрерывную функцию x(t), характеризующую внешнее воздейст-
вие, соответствующей ей решетчатой функцией x[nT], т. е. такой функцией,
значения которой изменяются лишь при дискретных равноотстоящих друг от друга значениях независимой переменной t /26/. Между этими значениями
решетчатая функция равна нулю.
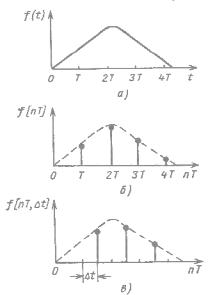
На рис. 2.8, а изображена непрерывная функция f(t), а на рис. 2.8, б — соответствую-
щая ей решетчатая функция f[nT], где n — це-
лое число, а Т - положительная величина, оп-
ределяющая расстояние между соседними
дискретными значениями независимой пере-
менной. Решетчатая функция получается из непрерывной, если положить t=nT.
Помимо простых решетчатых функций
при анализе импульсных систем используются
Рис. 2.8. Непрерывная (а), ре-
шетчатая (б) и смещенная ре- так называемые смещенные решетчатые функ-
шетчатая (в) функции
ции f[nT, t] (рис. 2.8, в), которые получаются из непрерывных функций, если положить в них t=nT+ t, где 0 t T характе-
ризует сдвиг аргумента.
Значения ординат непрерывной функции, совпадающих с ординатами решетчатых функций, называют дискретами (на рис. 2.8 выделены точками).
96

Одной и той же решетчатой функции могут соответствовать различные непрерывные функции, которые называют огибающими решетчатой функции
(рис. 2.9). Простейшей огибающей является ступенчатая функция, получаю-
|
щаяся из решетчатой простым проведением |
|
через ее ординаты отрезков, параллельных |
|
оси t. Решетчатые функции могут получаться |
|
не только из непрерывных. Любую числовую |
|
таблицу, аргумент которой меняется через |
Рис. 2.9. Решетчатая функция и |
равные интервалы, можно заменить решетча- |
огибающие ее непрерывные |
той функцией. |
функции: 1 – синусоидальная; |
|
2- линейная; 3 – ступенчатая |
Часто удобнее считать расстояние ме- |
|
жду дискретными значениями независимой переменной равным единице.
Для этого введем безразмерную переменную t t / T [t] , тогда
f(t ) f(Tt ). Или, для сокращения записи, f(Tt ) f(t ) f [t].
Решетчатая функция f[n] с безразмерным аргументом, где n=1, 2, 3, ...
будет совпадать с функцией f(Tt ) при значениях t n.
Скорость изменения решетчатой функции характеризуется ее первой разностью f[n], или разностью первого порядка, аналогично тому; как ско-
рость изменения непрерывной функции характеризуется первой производ-
ной. При этом различают прямые и обратные разности.
Прямая разность первого порядка решетчатой функции f[n] определя-
ется выражением |
|
f [n] f [n 1] f [n], |
(2.60) |
а обратная разность первого порядка – выражением |
|
f [n] f [n] f [n 1]. |
(2.61) |
В общем виде k-я разность (разность k-го порядка)
97
|
|
|
|
|
|
k |
k |
|
|
|
|
|
|
|
k f [n] k 1 f [n 1] k 1 f [n] ( 1) |
|
|
||||
|
|
|
|
|
f [n k ] |
|
|
|||
|
|
|
|
|
|
0 |
|
|
. |
(2.62) |
|
|
|
|
|
|
k |
k |
|||
|
|
|
|
|
|
|
|
|||
|
|
|
|
k f [n] k 1 f [n] k 1 f [n 1] ( 1) |
|
|
||||
|
|
|
|
|
f [n ] |
|
|
|||
|
|
|
|
|
|
0 |
|
|
|
|
где |
k |
|
k! |
биноминальный коэффициент. |
|
|
|
|||
|
|
|
|
– |
|
|
|
|||
|
|
|
|
|||||||
|
|
|
|
!(k )! |
|
|
|
|
|
|
Из сопоставления выражений (2.62) для прямой и обратной разностей следует
k f [n] k f [n 1] .
Соотношение между решетчатой функцией у[п] и ее разностями опре-
деляет уравнение в конечных разностях, или разностное уравнение. Если это соотношение линейно, то такое уравнение называют линейным. Линейное
разностное уравнение по аналогии с (2.22) можно представить |
в виде |
ak k y[n] ak 1 k 1 y[n] a0 y[n] x[n] . |
(2.63) |
Если в уравнении (2.63) заменить разности решетчатой функции их
значениями в соответствии с соотношением (2.62), то получится иная запись этого уравнения:
bk y[n k ] bk 1 y[n k 1] b0 |
y[n] x[n ] . |
(2.64) |
||||
Коэффициенты ai и bi уравнений (2.63) и (2.64) связаны между собой |
||||||
следующими соотношениями /4/: |
|
|
|
|
|
|
l |
k |
l |
k |
|
||
bk l ak ( 1)l |
|
(2.65) |
||||
|
,ak l |
bk |
. |
|||
0 |
l |
0 |
l |
|
||
Разностные уравнения (2.63) и (2.64) с правой частью, отличной от ну-
ля, называются неоднородными. Разностные уравнения с правой частью,
равной нулю, называются однородными. Разностное уравнение, содержащее
у[п] и y[n+k], называют уравнением k-го порядка.
Из выражения (2.64) видна связь между разностными и дифференци-
альными уравнениями. Если дифференциальные уравнения связывают зна-
чения функции у(t), соответствующие значениям аргумента t, отстоящим
98
друг от друга на бесконечно малую величину, то разностные уравнения свя-
зывают значения функции у[п], соответствующие дискретным значениям ар-
гумента n, отстоящим друг от друга на конечную величину (в нашем случае единицу).
Обозначим /4/ реакцию дискретной линейной системы на кратковре-
менное входное возмущение, равное единице и действующее только в тече-
ние времени действия k-го импульса, через gk(t). Тогда ее реакция на кратко-
временное возмущение, равное х(tk) и действующее только в течение време-
ни действия k-го импульса, будет на основании принципа суперпозиции рав-
на gk(t)х(tk). Реакция дискретной линейной системы на всю последователь-
ность импульсов, модулированных входным возмущением х(tk), в силу прин-
ципа суперпозиции определится формулой
|
|
y(t ) gk (t )x(tk ). |
(2.66) |
k
Это и есть основная формула, выражающая зависимость выходной пе-
ременной дискретной линейной системы от входного сигнала.
Функции gk(t) полностью характеризуют дискретную линейную систе-
му, так как, зная эти функции, можно вычислить реакцию дискретной линей-
ной системы на любое входное возмущение х(t). Функции gk(t) определяют долю, или удельный вес, значений входной переменной, действующих в раз-
личные моменты времени tk, в формировании выходной переменной системы в любой момент времени t. Вследствие этого функции gk(t) называются весо-
выми коэффициентами дискретной линейной системы.
Дискретизацию входных или промежуточных сигналов можно пред-
ставить их модуляцией (см. п. 1.4.4), где в качестве несущей частоты высту-
пает импульсная последовательность, а в качестве огибающей – входной сигнал (рис. 2.9).
99

e(t) |
|
|
|
|
|
e*[n] |
u[n] |
Модулятор (рис. 2.10, а) можно пред- |
|||||
|
|
|
|
|
|
|
|
|
|
|
|
ставить |
последовательным соединением |
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
ФЭ |
|
|
||
|
|
|
|
|
|
|
|
|
|
|
идеального импульсного элемента (ИИЭ), |
||
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
ИИЭ |
|
|||||||||
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
а) |
|
генерирующего последовательность - |
|||||
e(t) |
|
|
|
|
|
|
|
|
e*[n] |
|
импульсов e*[n], «амплитуды площадей» |
||
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
которых равны значениям входного сигна- |
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
б) |
|
||||||
|
|
|
|
|
|
|
ла e(t) |
в моменты квантования, и непре- |
|||||
Рис. 2.10. Импульсный |
|
рывного формирующего элемента (ФЭ), |
|||||||||||
модулятор с идеальным |
|
||||||||||||
|
|
|
|||||||||||
импульсным элементом |
|
преобразующего эти импульсы в импульс- |
|||||||||||
ную последовательность реального модулятора u(t). На рис. 2.10, б представ-
лена альтернативная форма графического изображения ИИЭ. Идеальный им-
пульсный элемент представляет собой амплитудно-импульсный модулятор,
непрерывный входной сигнал которого x(t) модулирует несущую последова-
тельность мгновенных -импульсов. Таким образом, на выходе ИИЭ форми-
руется последовательность мгновенных импульсов не единичной, а перемен-
ной площади, являющейся мерой входного сигнала в дискретные моменты времени.
Формирующий элемент вырабатывает дискретный сигнал, представ-
ляющий собой реакцию линейного элемента на импульсы ИИЭ. ФЭ, назы-
ваемые также фиксаторами или экстраполя-
e,u |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
торами, различают по способу формирова- |
|
|
|
|
e(t) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ния выходного сигнала. Так фиксатор (экст- |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
u(t) |
|
|
|
|
|
|
|
раполятор |
нулевого порядка) запоминает |
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
(рис. 2.11, кривая 1) или (экстраполятор |
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
первого порядка) линейно экстраполирует |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
t |
(рис. 2.11, |
кривая 2) площадь мгновенного |
|
0 |
|
|
|
1T |
|
|
2T |
|
|
3T |
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
импульса на входе до прихода следующего |
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
фиксатором: |
|
|||||||||
|
|
|
|
|||||||||||||||||||||
Рис. 2.11. АИМ с |
|
|||||||||||||||||||||||
1 |
– нулевого порядка |
|
|
|
|
|
|
|
импульса. |
|
||||||||||||||
2 |
– первого порядка |
|
|
|
|
|
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
100 |
|