

2809.Автоматизация в электроэнергетике и электротехнике
..pdfДля описания математической модели приняты следующие системы координат на расчетной схеме: XOY – неподвижная относительно основания, X′O′Y′ – неподвижная относительно решетного стана 2.
Координаты перемещения (следовательно, скорость и ускорение) сепарируемого материала, вторичного элемента и решетного стана в этих системах связаны следующим образом:
xм′ = xм − xр, xв′ = xв − xр,
где xм′ , xв′ – координаты перемещения сепарируемого материала и вторичного элемента соответственно по оси О′X′, м; xм, xв, xр – координаты перемещения
сепарируемого материала, вторичного элемента и решетного стана по оси ОХ м.
Движение решетного стана, сепарируемого материала и вторичного элемента соответственно описываются следующими уравнениями, м/с2:
x = |
|
1 |
(F |
− F |
|
− F − F |
+ F |
), (1) |
|||||||||||||||
|
|
|
|||||||||||||||||||||
р |
|
mр |
упр.3 |
упр.1 |
|
|
р |
|
|
тр.м |
|
|
тр.в |
|
|||||||||
|
|
|
|
|
fм +(1−sign |
|
|
|
)× |
||||||||||||||
xм = sign(−xм′ ) g |
|
xм′ |
|
||||||||||||||||||||
|
|
||||||||||||||||||||||
×(sign(xр) g fм θ( |
|
xр |
|
|
− g |
fм )+ |
(2) |
||||||||||||||||
|
|
||||||||||||||||||||||
|
|
|
|
+ xр θ(g fм − |
|
xр |
|
)), |
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
x = |
1 |
(F |
− F |
− F |
|
), |
|
|
(3) |
||||||||||||
|
|
|
|
|
|
||||||||||||||||||
|
|
в |
|
mв |
ЛАД |
|
упр.3 |
|
|
тр.в |
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
где |
mр, mв – масса решетного стана и |
||||||||||||||||||||||
вторичного элемента соответственно, кг; fм – коэффициент трения сепарируемо-
го материала о поверхность решета; g – ускорение свободного падения, м/с2; FЛАД = f (U1, xв.э ) – продольная сила, развиваемая ЛАД, определяемая уравнением электромеханического преобразования энергии Парка–Горева и зависящая от значений подаваемого напряжения U1, скорости вторичного элемента,
параметров схемы замещения, полюсного деления ЛАД [1].
Cуммарная сила упругих элементов 3, Н:
Fупр.3 = k3 xв′, |
(4) |
где k3 – суммарный коэффициент жест-
кости упругих элементов 3, Н/м. Суммарная сила упругих элементов
5, действующих на решетный стан,
Fупр.1 = k5 xр, |
(5) |
где k5 – суммарный коэффициент жесткости упругих элементов 5, Н/м; Fтр.р –
сила сопротивления опорных узлов решетного стана складывается из силы трения скольжения (или качения) и силы трения покоя, Н:
Fтр.р = Fтр.р.ск sign (xр ) sign ( xр )+
+(Fупр.1 − Fупр.3 − Fтр.м )×
×θ(Fтр.р.ск − Fупр.1 − Fупр.3 − Fтр.м )×
×(1−sign |
|
xр |
|
)+ |
(6) |
|
|
+Fтр.р.ск sign (Fупр.в.э − Fупр.л − Fтр.гр )×
×θ( Fупр.1 − Fупр.3 − Fтр.м − Fтр.р.ск )×
×(1−sign xр ),
где Fтр.р.ск = (mр + mм +mв ) g fр – сила
трения скольжения опорных узлов решетного стана, Н; mм – масса сепари-
руемого материала, кг; fр – коэффици-
ент трения скольжения опорных узлов решетного стана; Fтр.м – сила трения се-
парируемого материала о |
поверхность |
решета, Н, |
|
Fтр.м = mмxм. |
(7) |
Согласно рис. 3 сила инерции сепарируемого материала равна силе его трения о поверхность решета. Описание силы трения сепарируемого материала о поверхность решета отражено в выраже-
нии (2).
81

Сила трения в подшипниках вторичного элемента, Н:
Fтр.в = Fтр.ск sign (xв′) +(Fв )×
×θ(Fтр.ск − |
|
Fв |
|
) (1−sign |
|
xв′ |
|
) |
+ |
|||||
|
|
|
|
|||||||||||
+F |
sign (F )×θ( |
|
F |
|
− F |
)× (8) |
||||||||
|
|
|||||||||||||
тр.ск |
|
|
в |
|
|
|
в |
|
тр.ск |
|
||||
×(1−sign xв′ ),
где Fтр.ск – суммарная сила трения
скольжения (или качения) на подшипниках ЛАД, Н; Fв – сила взаимодействия индуктора ЛАД с решетным станом, Н:
Fв = FЛАД − Fупр.в.э −
− mв.mэ +в.эmл (FЛАД − Fупр.л − Fтр.гр − Fрол ). (9)
Включение и отключение напряжения питания ЛАД осуществляется блоком управления. Например, для осуществления колебательного движения ЛАД с определенной частотой с реверсом
FЛАД, Н
U1, %
Реверс
Xр, м
Xв, м
Xм, м
можно задать режим следующим способом:
U1 =Uист ×sign (sin (2 π fвкл t )), (10)
где Uист – напряжение источника пита-
ния, В; fвкл – частота включений (коле-
баний), Гц.
В результате приведенная в уравнениях (1)–(10) математическая модель реализована в приложении Simulink (MatLab), позволяющем провести необходимые исследования модели и расчеты.
На рис. 4 в качестве примера приведены временные характеристики силы, развиваемой ЛАД, FЛАД; напряжения на выводах индуктора ЛАД U1 (реверс показан как отрицательное значение напряжения); координат движения решетного стана Xр, вторичного элемента ЛАД Xв, сепарируемого материала Xм.
Рис. 4. Временные характеристики в приложении Simulink (MatLab)
82
Выводы. |
Составлена расчетная |
асинхронные электроприводы техно- |
схема вибрационного сепаратора на базе |
логических машин / Башк. гос. аграр. |
|
ЛАД. На основе расчетной схемы со- |
ун-т. – Уфа, 2013. – 308 с. |
|
ставлена математическая модель с при- |
2. Акчурин С.В, Линенко А.В., Тук- |
|
менением кусочно-постоянных функций. |
таров М.Ф. Математическая модель |
|
Математическая модель также реализо- |
инерционного движения материала в ус- |
|
вана в приложении Simulink (MatLab). |
тановках с линейным электроприводом // |
|
Приведенные |
временные характеристи- |
Вестник Башк. гос. аграр. ун-та. – 2013. – |
ки показывают работоспособность мате- |
№ 1(25). – С. 83–86. |
|
матической модели. |
3. Федоренко В.Ф., Ревякин Е.Л. |
|
Список литературы |
Зерноочистка – состояние и перспекти- |
|
вы. – М.: Росинформагротех, 2006. – |
||
1. Аипов Р.С., Линенко А.В. Линей- |
204 с. |
|
|
||
ные электрические машины и линейные |
|
|
83
УДК 621.316.728
МОДЕЛИРОВАНИЕ СОГЛАСОВАННОЙ СИСТЕМЫ ВРАЩЕНИЯ АСИНХРОННЫХ ДВИГАТЕЛЕЙ
С.В. Гаврилова, Н.В. Байрамов
Ульяновский государственный технический университет
Рассматривается система согласованного вращения двух асинхронных двигателей с короткозамкнутыми роторами, каждый из которых содержит по две независимые группы обмоток на статоре. Обосновывается эффективность использования раздельного включения двух групп обмоток двигателя. Рассматривается возможность уменьшения величины статической ошибки рассогласования скоростей вращения двигателей.
Ключевые слова: асинхронный двигатель, согласованное вращение, статическая ошибка, регулирование скорости.
MODELING THE COHERENT SYSTEM OF ROTATION
OF THE INDUCTION MOTORS
S.V. Gavrilоva, N.V. Bayramov
Ulyanovsk State Technical University
This article covers the coherent system of rotation of the two induction motors with short-circuited rotor, each of which contains two independent groups of windings on the stator. Substantiates the effectiveness of using separate switching of two groups of motor windings. The possibility of reducing the amount of static mismatch errors for motor speeds.
Keywords: induction motor, harmonized rotation, static error, speed control.
С внедрением электродвигателя в технике произошел переход от индивидуального и группового привода к многодвигательному приводу. Необходимая мощность для крупных рабочих механизмов обычно составляется из многочисленных мелких двигателей.
На пути технически целесообразного решения часто возникают значительные трудности, в частности тогда, когда пространственно разделенные группы машин должны по технологическим причинам приводиться в действие с абсолютно одинаковыми скоростями вращения. Требование в отношении согласованного вращения можно выполнить без механических вспомогательных средств, таких как механические валы и редукторные передачи, чисто электрическим путем. Одна из возможностей заключается в применении электродвига-
телей с регулируемой скоростью вращения в сочетании с соответствующим управлением согласованной работой. Такое устройство предусматривается, кода рабочий процесс, наряду с необходимостью согласованного вращения, требует также и возможности регулирования скорости вращения.
В существующих схемах согласованного вращения двухдвигательной системы обмотки статора обеих машин присоединены параллельно к сети трехфазного тока. Эти схемы применяются очень широко, однако они являются далеко не единственно возможными и при определенных обстоятельствах, в зависимости от условий применения и желательных эксплуатационных свойств, более хорошие результаты могут дать другие схемы.
Анализ работы двухскоростных асинхронных двигателей показывает воз-
84

можность создания эффективной системы управления двухдвигательной системой за счет разделения обмоток статора на две независимые обмотки. В этом случае один комплект обмоток статоров машин подключается к питающей сети, а второй комплект служит для обеспечения согласованного управления двухдвигательной системой. Сущность предлагаемого решения поясняется чертежом, на котором показана функциональная схема устройства согласованного вращения двух асинхронных двигателей с короткозамкнутыми роторами (рис. 1).
Устройство включает в себя два асинхронных двигателя с короткозамкнутыми роторами, каждый из которых содержит по две независимые группы обмоток на статоре. Начала первых групп обмоток статоров асинхронных двигателей с короткозамкнутыми роторами соединены с питающей сетью, а концы этих обмоток соединены с трехфазными выпрямителями, к полярным выходам которых подключены транзисторы. Базы транзисторов подключены
к выходам широтно-импульсных модуляторов. Выходы вторых групп обмоток статоров асинхронных двигателей с короткозамкнутыми роторами соединены в «звезду», выходы соединений «звезда» и их нулевые точки соединены четырехпроходной линией связи. В одном проводе линии связи включена первичная обмотка трансформатора тока, вторичная обмотка которого соединена с шунтовым резистором и сигнальным входом фазочастотного выпрямителя. Синхронизирующий вход фазочастотного выпрямителя подключен к фазному напряжению питающей сети. Выход фазочастотного выпрямителя подключен через корректирующее звено к первым входам сумматоров. На вторые входы сумматоров подается напряжение задания. Выходы сумматоров соединены с входами широтно-импульсных модуляторов.
Устройство работает следующим образом: напряжение задания Uзад через сумматоры 18 и 19 поступает на входы широтно-импульсных модуляторов 6 и 10, которые, в свою очередь, формируют
Рис. 1. Схема устройства согласованного вращения асинхронных двигателей
85
управляющие импульсы для переключе- |
двигателя с большей скоростью враще- |
|||||
ния транзисторов 5 и 6. Скважность им- |
ния он будет сигналом отрицательной |
|||||
пульсов пропорциональна величине Uзад. |
обратной связи и уменьшит скважность |
|||||
Изменение скважности регулирует дей- |
коммутации соответствующего транзис- |
|||||
ствующее значение напряжения, посту- |
тора, а для двигателя с меньшей скоро- |
|||||
пающего на группы обмоток 3 и 7 асин- |
стью вращения – сигналом положитель- |
|||||
хронных двигателей 1 и 2. При этом |
ной обратной связи и приведет к |
|||||
изменяется скорость вращения асин- |
увеличению скважности коммутации со- |
|||||
хронных двигателей 1 и 2 [3]. |
ответствующего транзистора. В этом |
|||||
В случае равенства скоростей вра- |
случае |
величина |
статической |
ошибки |
||
щения асинхронных двигателей 1 и 2 |
рассогласования |
скоростей вращения |
||||
ЭДС, наводимые на группах обмоток 11 |
снизится пропорционально коэффициен- |
|||||
и 13, равны. При этом ток по линии свя- |
ту усиления корректирующего звена. |
|||||
зи 12 не протекает. Нарушение согласо- |
Существенное преимущество пред- |
|||||
ванного вращения асинхронных двига- |
ложенной схемы заключается в простоте |
|||||
телей 1 и 2 приводит к нарушению ра- |
ее конструкции и возможности приме- |
|||||
венства ЭДС групп обмоток 11 и 13. При |
нять машины с короткозамкнутым рото- |
|||||
этом по линии связи 12 будут протекать |
ром. Это устройство для обеспечения со- |
|||||
уравнительные токи. Для двигателя с |
гласованной работы является очень на- |
|||||
большей скоростью вращения эти токи |
дежным |
|
в |
эксплуатации, |
мало |
|
будут создавать тормозящий момент, а |
подвержено неполадкам и может при |
|||||
для двигателя с меньшей скоростью вра- |
тщательном проектировании применять- |
|||||
щения – двигательный момент. |
ся без каких-либо затруднений в широ- |
|||||
Из-за ограниченных значений коэф- |
ких диапазонах скоростей вращения и в |
|||||
фициентов передачи элементов системы |
обоих направлениях вращения. |
|
||||
будет присутствовать статическая ошибка |
Особое значение имеют статические |
|||||
и протекать остаточный уравнительный |
и динамические свойства системы согла- |
|||||
ток по линии связи 12. На вторичной об- |
сованной работы двигателей. |
|
||||
мотке трансформатора тока 14 наводится |
На основании схемы (см. рис. 1) бы- |
|||||
ток, пропорциональный току первичной |
ла составлена модель системы согласо- |
|||||
цепи. Этот ток, протекая через шунтовой |
ванного вращения, проведено моделиро- |
|||||
резистор, создает напряжение, пропор- |
вание и получены графики переходных |
|||||
циональное остаточному уравнительному |
процессов при различных значениях ко- |
|||||
току. Это напряжение подается на вход |
эффициента |
в |
контуре |
компенсации |
||
фазочастотного выпрямителя 16. В зави- |
(k = 1, k = 10, k = 20 и k = 27). Результаты |
|||||
симости от амплитуды и фазы тока, про- |
моделирования приведены на рис. 2–5 |
|||||
текающего по линии связи на выходе фа- |
соответственно. |
|
|
|
||
зочастотного выпрямителя 16, будет фор- |
Для |
более |
полной |
компенсации |
||
мироваться сигнал рассогласования. |
ошибки регулирования ∆n = n1 – n2 не- |
|||||
Для устранения статической ошибки |
обходимо увеличить коэффициент в кон- |
|||||
сигнал с фазочастотного выпрямителя 16 |
туре компенсации (см. рис. 3). |
|
||||
поступает на корректирующее звено 17, |
За |
счет |
увеличения |
коэффициента |
||
на котором происходит усиление сигна- |
уменьшается величина ошибки регулиро- |
|||||
ла рассогласования. С выхода корректи- |
вания. При значении коэффициента k = 20 |
|||||
рующего звена 17 сигнал поступает на |
ошибка между скоростями электроприво- |
|||||
первые входы сумматоров 18 и 19. Для |
дов становится минимальной (см. рис. 4). |
|||||
86
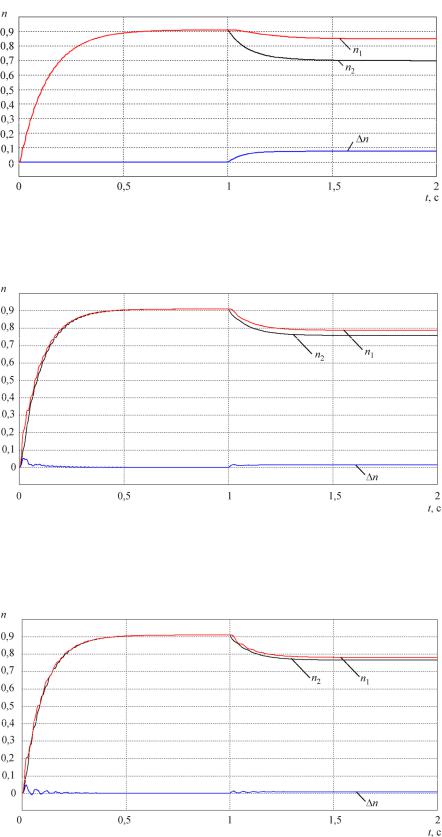
Рис. 2. Переходные процессы пуска и наброса нагрузки на двигатели без усиления сигнала
Рис. 3. Переходные процессы пуска и наброса нагрузки на двигатели при значении коэффициента в контуре компенсации k = 10
Рис. 4. Переходные процессы пуска и наброса нагрузки на двигатели при значении коэффициента в контуре компенсации k = 20
87
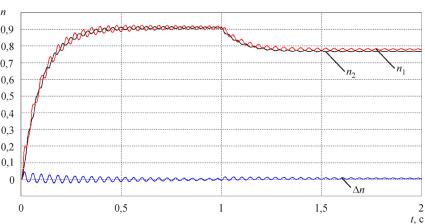
Рис. 5. Переходные процессы пуска и наброса нагрузки на двигатели при значении коэффициента в контуре компенсации k = 27
При значении коэффициента в кон- |
|
Список литературы |
||
туре компенсации k = 27 в переход- |
|
|
|
|
ных процессах появилась колебательная |
1. Доманов В.И., Доманов А.В., Гав- |
|||
составляющая (см. рис. 5). При даль- |
рилова С.В. Параметрическая автомати- |
|||
нейшем увеличении коэффициента сис- |
зация |
двухскоростного |
асинхронного |
|
тема становится неустойчивой. |
двигателя // Промышленные АСУ и кон- |
|||
Анализ модели показал, что сущест- |
троллеры. – 2015. – № 3. – С. 3–7. |
|||
вует настройка, при которой ошибка |
2. Доманов В.И., Доманов А.В., Гав- |
|||
в скоростях электроприводов минималь- |
рилова С.В. Параметрические системы |
|||
на и колебания близки к техническому |
управления многодвигательного электро- |
|||
оптимуму. При повышении коэффици- |
привода грузоподъемных |
механизмов // |
||
ента в контуре компенсации начинают |
Электроника и |
электрооборудование |
||
возрастать колебания и теряется устой- |
транспорта. – 2015. – № 4. – С. 35–38. |
|||
чивость. |
3. Москаленко |
В.В. |
Электриче- |
|
|
ский |
привод. – М.: Академия, 2007. – |
||
|
С. 111–114. |
|
|
|
88
УДК 621.3
РАЗРАБОТКА СИНХРОННОГО РЕАКТИВНОГО ЭЛЕКТРОПРИВОДА
В.А. Дмитриевский, В.А. Прахт, В.М. Казакбаев, А.С. Поздеев, А.Ф. Михалицын, С.Х. Ошурбеков
ООО «ЭМАШ», Екатеринбург Уральский федеральный университет имени первого Президента России Б.Н. Ельцина,
Екатеринбург
Проведен обзор различных аспектов разработки энергоэффективного электропривода с синхронным реактивным двигателем. Приводятся результаты сравнительного экспериментального исследования синхронного реактивного двигателя и асинхронных двигателей, аналогичных по массогабаритным характеристикам. Сделаны выводы относительно возможности применения разработанного авторами электропривода в ряде промышленных приложений.
Ключевые слова: трехфазный электропривод, синхронный реактивный двигатель, асинхронный двигатель, энергоэффективность.
DEVELOPMENT OF A SYNCHRONOUS RELUCTANCE ELECTRIC DRIVE
V.A. Dmitrievskii, V.A. Prakht, V.M. Kazakbaev, A.S. Pozdeev,
A.F. Mikhalitsyn, S.H. Oshurbekov
EMACH Ltd, Еkaterinburg
Ural Federal University named after the first President of Russia Boris Yeltsin, Еkaterinburg
The article provides an overview of the various aspects of the development of energy-efficient electric drive with synchronous reluctance motor. The results of a comparative study of the prototype synchronous reluctance motor and asynchronous motors that similar in weight and size are given. The conclusions regarding the possibility of the use of electric drive developed by the authors in a number of industrial applications are given.
Keywords: three-phase electric drive, synchronous reluctance motor, induction motor, efficient energy use.
К началу XXI в. на фоне общей тенденции к экономии энергоресурсов стала важной проблема улучшения энергоэффективности электропривода (ЭП). Энергопотребление может быть значительно снижено с помощью применения двигателей и преобразователей частоты с высокими классами энергоэффективности [2].
Наиболее используемым типом двигателя на сегодняшний день является асинхронный двигатель (АД). Однако в настоящее время АД уже достигли предела своего конструктивного и технологического совершенствования. Дальнейшее улучшение КПД этих двигателей возможно лишь экстенсивными методами: использование большего количества меди и стали, а также применение медной бе-
личьей клетки ротора [1]. Основным недостатком таких решений является увеличение размеров двигателя и его стоимости. Более того, использование медной беличьей клетки ротора приводит к значительному усложнению и удорожанию технологии производства из-за высокой температуры плавления меди [1].
Одним из альтернативных путей для получения электродвигателей высокого класса энергоэффективности (IE3 и IE4), который не требует значительного усложнения технологии производства, избыточного увеличения размеров и массы, а также использования дорогих постоянных магнитов (ПМ), является использование синхронного реактивного двигателя (СРД). СРД не имеет электрических потерь в обмотке ротора и может
89

соответствовать самым высоким классам энергоэффективности [1].
Внастоящее время ведущие европейские производители предлагают СРД
вкомплекте с преобразователем частоты (ПЧ) для использования в приложениях, где применение частотно-регулируемого двигателя дает значительный эффект энергосбережения (например, приложения с вентиляторной и насосной нагрузкой и привод лифтов и подъемников). Такие установки составляют большую часть приложений, где используется регулируемый ЭП. Международным кон-
церном ABB (ASEA Brown Boveri) про-
изводятся две серии СРД для привода насосов, компрессоров и вентиляторов: двигатели класса IE4, а также малогабаритные двигатели класса IE3. Планируется серийное изготовление двигателей класса IE5 (под классом IE5, который еще не утвержден официально, понимается снижение суммарных потерь в двигателе на 20 % в сравнении с классом IE4). Также энергоэффективные СРД класса IE4 применяет в составе своих насосных установок немецкая фирма
KSB (Klein, Schanzlin & Becker). Фирма
Siemens тоже анонсировала появление на рынке своей линейки ЭП рассматриваемого типа в ближайшее время.
От других энергоэффективных двигателей (синхронные двигатели с ПМ) СРД выгодно отличается простотой конструкции ротора машины, отсутствием в конструкции машины дорогостоящих и существенно усложняющих изготовление, обслуживание и ремонт постоянных магнитов и максимальной унификацией технологии производства такого двигателя с производством АД.
Вданной работе представлено экспериментальное сравнение рабочих свойств стандартной конфигурации современного частотно-регулируемого асинхронного привода и разработанного
90
авторами синхронного реактивного электропривода. Рассматриваемый в работе СРД проектировался на базе статора асинхронного двигателя АИМЛ 71 А4 (www.segz.ru) (рис. 1, а). Двигатель АИМЛ имеет 24 паза на статоре и 18 пазов на роторе (рис. 1, б). В роторе двигателя АИМЛ применятся литая алюминиевая беличья клетка ротора. Двигатели АИМЛ имеют взрывозащищенное исполнение, габариты их магнитной системы примерно соответствуют габаритам общепромышленных АД класса IE2.
а
бв
Рис. 1. СРД: а – корпус и ротор исследуемого образца; б – экспериментальный образец преобразователя частоты; в – пакет ротора
При изготовлении СРД статор, корпус статора, вал, система вентиляции и все остальные узлы, за исключением пакета ротора и обмотки статора, не были изменены в сравнение с конструкцией исходного АД. Пакет ротора СРД был установлен на вал вместо пакета ротора АД с беличьей клеткой. Пакет статора исходного АД изготовлен из стали марки Ст 2212, 0,5 мм (B ≥ 1,6 Тл при H =