

2809.Автоматизация в электроэнергетике и электротехнике
..pdfУДК 621.452:681.513.6
О ЗАДАЧЕ АДАПТИВНОГО УПРАВЛЕНИЯ ГАЗОТУРБИННОЙ ЭЛЕКТРОСТАНЦИЕЙ С ЭТАЛОННОЙ МОДЕЛЬЮ
И.В. Бахирев, Б.В. Кавалеров
Пермский национальный исследовательский политехнический университет
Исследуются возможности построения адаптивных систем автоматического управления газотурбинными электростанциями с использованием эталонной модели. Рассматривается применение сигнальной настройки для достижения быстродействующей адаптации в составе штатного регулятора. Представлены результаты компьютерных экспериментов.
Ключевые слова: адаптивная система, система автоматического управления, газотурбинная установка, моделирование.
ON THE PROBLEM OF GAS TURBINE POWER PLANT ADAPTIVE CONTROL
WITH REFERENCE MODEL
I.V. Bahirev, B.V. Kavalerov
Perm National Research Polytechnic University
The article investigates the possibilities of gas turbine power plant model reference adaptive control. The application of the signal tuning to achieve high-speed adaptation as part of regular controller. The results of computer experiments presented.
Keywords: adaptive system, automatic control system, gas turbine unit, modeling.
Введение. Авиационные газотурбинные установки (ГТУ) в настоящее время достаточно широко применяются в наземных условиях, в частности при построении электростанций различной мощности [1]. Такие электроэнергетические ГТУ являются работоспособными только при наличии системы автоматического управления (САУ), при этом алгоритмы САУ в значительной мере определяют показатели качества работы ГТУ различного назначения [2]. В связи с этим задачам совершенствования САУ следует уделять повышенное внимание. Когда ГТУ используется в качестве привода электрогенераторов, возникает необходимость обеспечения заданных показателей качества электроэнергии в условиях постоянно изменяющейся электрической нагрузки и режимов работы электростанции. В связи с этим для совершенствования САУ ГТУ перспективным признается все более широкое
использование адаптивного подхода, в том числе с применением встроенных моделей ГТУ, нейро-нечеткого управления, генетических алгоритмов и других активно развиваемых приложений теории автоматического управления [3]. В настоящей статье исследуются возможности адаптивного управления ГТУ с эталонной моделью и сигнальной настройкой при использовании сигмоидальной функции [4].
Сигнальное адаптивное управление с эталонной моделью. Автоматиче-
ские системы управления с эталонной моделью (АСЭМ) очень распространены. Как отмечается в работе [5], причиной такого внимания является конструктивность постановки задачи и красота математического аппарата. Существование эталонной модели позволяет узнать, к чему надо стремиться, отсюда следует возможность применения аналогов принципа обратной связи, заложенного
31
как в природе, так и во всех сферах человеческой деятельности. В этом – конструктивность АСЭМ [5]. Красота математического аппарата заключается, например, в том, что прямой метод Ляпунова эффективно используется не только для анализа движения, но и для отыскания алгоритмов функционирования АСЭМ, являющихся принципиально нелинейными нестационарными многосвязаными динамическими системами [5].
АСЭМ присущ и ряд недостатков. В работе [5] среди них отмечаются: зависимость динамической точности движения АСЭМ от интенсивности и спектра входных воздействий, от скоростей изменения параметрических и координатных возмущений, от необходимости достаточно содержательной информации о векторе состояния системы. Все эти факторы приводят к малой предсказуемости динамики движения АСЭМ [5].
Встатье [6] авторы рассматривали АСЭМ с сигнальной настройкой, реализующую функцию sign при своем функционировании. Результаты математического моделирования выявили проблемы физической реализуемости, предсказанные еще в работе [7]. Преодолеть проблему физической реализуемости, как показали проведенные исследования, возможно с использованием сигмоидальной функции [4].
Вработе [7], среди прочих методов управления, приведена теоретическая база для построения сигнального адаптивного управления электромеханическим объектом с помощью эталонной моделью. Основным достоинством данного метода можно назвать отсутствие сложных и, как следствие, долгих математических вычислений. В работе [6] упомянутый метод синтеза системы адаптивного управления использован для ГТУ.
Согласно работе [7], движение ГТУ с учетом нестабильности свойств запишем в виде дифференциальных уравнений
x = F(x, u, ξ, f , ...); x(t0 ) = x0 , (1)
где x = x (t) – n-мерная функция состояния системы; u = u(t) – m-мерная функция управляющих воздействий; ξ – вектор ограниченной размерности меняющихся параметров; f = f(t) – n-мерная функция внешних возмущений; х0 – начальное состояние.
Далее описание нелинейной нестационарной модели ГТУ представим в виде
|
х = А(х, t)x + В (x,t) u+ f (t), (2) |
|
где |
A (x, t) = А (ξ (х, t)); |
В(x, t) = |
= В (ξ (х, t)) – функциональные матрицы соответствующих размеров. Здесь предполагается управляемость пары (А, В). Описание (1) должно сопровождаться указанием границ изменения элементов матриц А, В.
Выделим в правой части выражения
(2) линейную стационарную часть так, чтобы описание имело вид
х=А0х + В0u + σϕ; у = Сх, (3)
где у – p-вектор выходов объекта;
σϕ= F (х,u, ξ, f, t) −А0х−В0u; u – m-мер-
ный вектор управляющих сигналов: u = (Gт ), где Gт – расход топлива ГТУ,
кг/ч; А0, В0, С – соответственно (n × n), (n × m), (p × n)-мерные постоянные матрицы, характеризующие линейную стационарную часть, которая может быть приближением, полученным линеаризацией и усреднением во времени элементов матриц, либо обозначать желаемое поведение объекта; x – вектор состояния, x = (nс.т, nтк, NЕ )т , где nс.т – частота вра-
32
щения свободной турбины ГТУ, об/мин; nтk – частота вращения турбокомпрессора ГТУ, об/мин; NE – мощность свободной турбины ГТУ, кВт. Возмущение f = (NG ), где NG – мощность нагрузки,
кВт. В дальнейших выкладках для упрощения расчетов отнесем NG к состоя-
ниям системы. Тогда А0 = Ам, В0 = Вм, Ам – гурвицева матрица (устойчива).
Добавим к выражению (2) уравнение адаптивного регулятора в виде
u = U (x, K, z, g), |
(4) |
где g = g(t) – m-мерный вектор сигналов задания, для ГТУ – это заданная частота вращения свободной турбины nс.тзад; K = K(t) – матрица настраиваемых параметров; z = z(t) – m-вектор дополнительных (сигнальных) воздействий. Здесь K и z – средства адаптации: параметрическая настройка (ПН) и сигнальная настройка (СН) [1].
Пусть задана эталонная модель вида
x = Амхм + Bмg, |
(5) |
где g = (nс.тзад ).
Требуется построить закон управления u(t), выраженный через минимизацию функционала качества на решениях системы (3), (5), такой, что при любых ξ М, х(t0 ), хм (t0 ) выполнялось нера-
венство
||x(t) − хм (t)|| = || е(t) || ≤ 0 |
(6) |
для любых t ≥ ta, ta = t0 + θa, t0 ≥ 0, где θa – время адаптации, или предельное соотношение
lim || е (t) || = 0, |
(7) |
||
t→∞ |
|
||
для сигнальной адаптации |
|
||
z(t) = − hsgn(BтPe); h > 0, |
(8) |
||
где (sgn BтPe) |
|
= sgn(BтPe) . |
|
|
i |
i |
|
Уравнение (8) задает алгоритм сигнальной настройки с функцией sign.
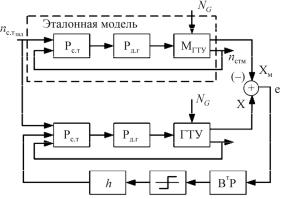
На рис. 1 представлена структура АСЭМ с сигнальной настройкой.
Рис. 1. Структурная схема АСЭМ
На рис. 1 приняты следующие обозначения: NG – мощность нагрузки, кВт; Xм – вектор состояния ЭМ; X – вектор состояния системы; e – вектор динамических ошибок; h – параметр из выражения (8); B, P – матрицы из выражения (8); Рс.т – регулятор свободной турбины; Рд.г – регулятор дозатора газа; МГТУ – модель ГТУ.
Вектор x представлен в следующем виде: x1 = nс.т, x2 = nтк, x3 – выход интегратора регулятора дозатора газа, x4 – выход интегратора регулятора nс.т.
Модель ГТУ. Для проведения исследований используется упрощенная модель ГТУ, полученная с помощью идентификации методом наименьших квадратов [8]. Структура дифференциальных уравнений выбрана с учетом априорной информации об основных физических принципах преобразования энергии в ГТУ. Модель сохраняет допустимую адекватность для работы САУ ГТУ в режиме стабилизации частоты вращения свободной турбины ГТУ от холостого хода до 1,2 номинальной нагрузки.
Уравнения имеют следующий вид [6]:
33

а) уравнение ротора турбокомпрес-
сора
|
|
dnтк |
|
= (n |
|
− n |
тк |
) / T (n |
тк |
); |
(9) |
|||||||
|
|
|
|
|||||||||||||||
|
|
|
dt |
ТS |
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
б) уравнение свободной турбины |
|||||||||||||||||
|
|
|
|
|
|
dnс.т |
|
= |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
dt |
|
|
|
|
|
|
|
|
|
|
|
(10) |
= |
1 |
|
|
|
1+k |
|
|
dn |
|
|
|
− N |
|
|||||
|
|
|
|
|
e |
|
тк |
|
N |
E |
. |
|
||||||
|
|
|
|
|
|
|
||||||||||||
|
nс.тJ (nс.т ) |
|
|
|
dt |
|
|
|
|
|
|
|
|
|||||
Здесь nTS = f(Gт) – нелинейная статическая характеристика, отражающая преобразование расхода топлива, кг/ч, в обороты турбокомпрессора, об/мин; T(nтк) – постоянная времени турбокомпрессора, зависящая от текущей частоты вращения турбокомпрессора; NE = f(nтк) – нелинейная статическая характеристика, отражающая преобразование частоты вращения турбокомпрессора, об/мин, в мощность свободной турбины, кВт; NG – мощность нагрузки, кВт; J(nс.т) – суммарный приведенный к валу свободной турбины момент инерции; nс.т – частота вращения свободной турбины, об/мин. Турбокомпрессор представлен апериодическим звеном, так как переходный процесс по частоте вращения турбокомпрессора имеет явный апериодический характер. Свободная турбина представлена идеальным интегрирующим звеном, так как при расбалансе мощностей NE и NG частота вращения свободной турбины или возрастает, или уменьшается практически по линейному закону (при рассмотрении больших промежутков времени переходный процесс отклоняется от линейного, но для режима стабилизации nс.т этим можно пренебречь).
Полученная в исследовании [6] модель ГТУ оказалась подобна модели электрического двигателя, который рассматривается в работе [7], там тоже внешняя переменная изменяется по ин-
тегральному закону, а внутренняя – по апериодическому закону [9], что оправдывает использование методики [7] в рассматриваемом случае.
Номинальный |
режим |
ГТУ – |
2500 кВт. Эталонная |
модель |
включает |
в себя, помимо уравнений собственно ГТУ (9), (10), также регуляторы ГТУ. В режиме стабилизации nс.т основную роль играют два регулятора САУ ГТУ: регулятор частоты вращения свободной турбины nс.т и регулятор дозатора газа. Регуляторы включаются последовательно. Передаточная функция регулятора nс.т имеет следующий вид [6]:
W |
( p) = k |
|
ki +k f p |
, |
(11) |
|
k + p |
||||
с.т |
|
п |
|
|
|
|
|
|
i |
|
|
передаточная функция дозатора газа
WG ( p) = 1+Tд p kд. (12) p
Данный вариант адаптивного управления является достаточно простым и быстродействующим. Основным недостатком становятся высокочастотные колебания, которые ставят под сомнение возможность применения данного метода для управления ГТУ [6].
Выбор структуры сигнальной ветви. В работах [4, 10] среди прочего проводится параллель между функциями sign и sigma. Для разрешения проблемы высокочастотных колебаний в системе заменим sign на гладкую функцию с насыщением. Нелинейная сигма-функция является гладкой, не имеет особых точек и именно за счет ее нелинейности обеспечивается лучшее качество оцениваемых сигналов. Выбор именно сигмафункции из класса гладких S-образных функций обусловлен тем, что ее старшие производные всюду существуют, ограничены и рекуррентно выражаются через сигма-функцию, что является удобным инструментом формализации алго-
34

ритма настройки параметров в многомерном случае [4, 10].
С этой целью внесем изменения в уравнение (8):
z(t) = − hsigma |
(BтPe), h > 0, |
(13) |
||||||
где sigma(x) = |
|
|
1 |
−0,5 = 0,5 |
1−e−x/k |
– |
||
1 |
+e−x/k |
1+e−x/k |
||||||
|
|
|
||||||
это сигмоидальная функция, коэффициент k = const > 0 определяет угол наклона касательной к сигма-функции в нуле, иначе говоря сжатие/растяжение относительно оси абсцисс, тангенс угла накло-
на касательной будет равен 21k . В окре-
стности нуля данная функция является бесконечно малой первого порядка ма-
лости sigma(x) |
x / (2k), |
|
при |
|
|
k → +0 |
||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
x→0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
стремится |
|
|
|
к |
функции |
|
|
|
знака |
|||||||||||||||||||
lim sigma(x) = sign(x). |
При |
|
x |
|
> δ > 0 |
|||||||||||||||||||||||
|
|
|||||||||||||||||||||||||||
k→+0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
и |
|
x |
|
≤ δ |
соответственно |
справедливы |
||||||||||||||||||||||
|
|
|||||||||||||||||||||||||||
оценки |
|
sigma(δ) < |
|
sigma(x) |
|
<1 |
и |
|||||||||||||||||||||
|
|
|||||||||||||||||||||||||||
sigma(δ) |
|
x |
|
≤ |
|
sigma(x) |
|
≤ |
1 |
|
|
x |
|
. |
|
|
Точки |
|||||||||||
|
|
|
|
|
|
|
|
|||||||||||||||||||||
|
|
δ |
|
|
|
|
2k |
|
|
|
|
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
x ≈ ±1,3k служат естественными границами, которые отделяют промежутки области определения, где сигма-функция близка или к постоянной, или к линейной функции [4]. Производная сигмафункции представима в виде
sigma′(x/k) = 1−sigma2 (x/k) . (14) 2k
Благодаря простому выражению производной сигма-функции ее удобно использовать в различных системах.
Таким образом, устанавливается соответствие между множеством значений ошибок параметров и множеством значений сигнальной ветви, что позволяет перейти от скользящего режима к обычному управлению, сохранив все достоинства первого.
Соответствующим образом на рис. 1 вместо блока sign появится блок sigma. График сигма-функции этого блока для k = 1 приведен на рис. 2.
Рис. 2. График сигма-функции
В результате экспериментов было получено следующее соотношение между параметрами k и h: k = 1000h, где k выбирается таким образом, чтобы зона насыщения сигма-функции не достигалась.
Сигнальная настройка в составе полного регулятора ГТУ. Сигнальная настройка влияет только на регулятор частоты вращения свободной турбины. Включение модуля сигнальной настройки в штатный регулятор можно представить следующим образом (рис. 3).
Рис. 3. Взаимодействие сигнальной настройки и штатного регулятора ГТУ
Модуль сигнальной настройки вынесен за пределы САУ, так как не является частью штатного регулятора. Сиг-
35
нальное воздействие влияет только на контур стабилизации частоты вращения свободной турбины и никак не взаимодействует непосредственно с другими контурами. Вектор параметров х полностью доступен в структуре штатного регулятора, препятствий для включения модуля сигнальной настройки в существующий регулятор нет. Данный вывод был сделан после анализа программного кода штатного регулятора.
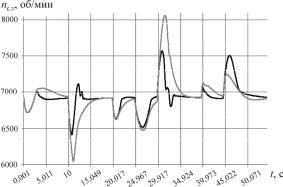
Результаты моделирования. В про-
цессе моделирования нагрузка менялась следующим образом: 1000, 3000, 4500, 5500, 3500, 2000, 500 кВт.
На рис. 4 сигнальная настройка уступает штатному регулятору только на последнем участке. Это вызвано тем, что настройка ЭМ для данного участка требует слишком быстрого изменения расхода топлива и управление перехватывает контур ограничения.
Рис. 4. График изменения частоты вращения свободной турбины: серый цвет – штатный регулятор; черный цвет – штатный регулятор с сигнальной настройкой
Заключение. Приведенный метод адаптивного управления применим в составе сложной селективной САУ. Главной сложностью данного метода является настройка ЭМ для объекта управления.
Опубликованные в статье результаты получены в рамках выполнения государственного задания Минобрнауки
РФ № 13.832.2014/K «Разработка методологических основ адаптивного управления автономными и неавтономными газотурбинными электростанциями мощностью до 25 МВт».
Список литературы
1.Кавалеров Б.В. Автоматизация испытаний САУ ГТУ газотурбинных мини-электростанций при проектировании и настройке // Автоматизация в про-
мышленности. – 2011. – № 1. – С. 12–17.
2.Автоматика и регулирование авиационных двигателей и энергетических установок / А.А. Иноземцев, М.А. Нихамкин [и др.]. – М.: Машино-
строение, 2008. – Т. 5. – 190 с.
3.О задачах исследования адаптивного управления электростанциями на базе конвертированных авиационных ГТУ / Б.В. Кавалеров, И.В. Бахирев, Г.А. Килин [и др.] // Вестник ПНИПУ. Электротехника, информационные технологии, системы управления. – 2014. –
№11. – С. 65–77.
4. Бабин В.А., Дик В.В., Краснова С.А. Допредельные реализации разрывных корректирующих воздействий наблюдателя, функционирующего в скользящем режиме // XII Всерос. совещание по проблемам управления ВСПУ –
2014. – М.: Изд-во ИПУ РАН. – 2014. – С. 16–19.
5.Земляков С.Д., Рутковский В.Ю. Алгоритм функционирования адаптивной системы с эталонной моделью, гарантирующий заданную динамическую точность управления нестационарным динамическим объектом в условиях неопределенности // Автоматика
ителемеханика. – 2009. – № 10. –
С. 35–44.
6.Бахирев И.А., Басаргин Ш.Д., Кавалеров Б.В. Адаптивное управление газотурбинной установкой с эталонной
36
моделью и сигнальной настройкой // |
неж. гос. ун-та. Сер.: Системный анализ |
Системы управления и информационные |
и информационные технологии. – 2014. – |
технологии. – 2015. – № 2(60). – С. 71–76. |
№ 1. – С. 65–71. |
7. Борцов Ю.А., Поляхов Н.Д., Пу- |
9. Башарин А.В., Новиков В.А., Со- |
тов В.В. Электромеханические системы |
коловский Г.Г. Управление электропри- |
с адаптивным и модельным управлени- |
водами: учеб. пособие для вузов. – Л.: |
ем. – Л.: Энергоатомиздат, 1984. – 216 с. |
Энергоиздат, 1982. – 392 с. |
8. Идентификация газоперекачиваю- |
10. Краснова С.А., Мысик Н.С. Кас- |
щего агрегата для модельного испытания |
кадный синтез наблюдателя состояния |
и настройки системы управления / |
с нелинейными корректирующими воз- |
Г.А. Килин, Б.В. Кавалеров, И.В. Бахи- |
действиями // Автоматика и телемехани- |
рев, А.Ю. Поварницын // Вестник Воро- |
ка. – 2014. – №. 2. – С. 106–128. |
37
УДК 62-503.51
ПРИМЕНЕНИЕ НЕЙРОСЕТЕВЫХ ДИНАМИЧЕСКИХ МОДЕЛЕЙ В ЗАДАЧЕ ПАРАМЕТРИЧЕСКОЙ ИДЕНТИФИКАЦИИ УПРАВЛЯЕМЫХ ОБЪЕКТОВ
А.Г. Шумихин, А.С. Бояршинова
Пермский национальный исследовательский политехнический университет
Приведены результаты исследований по идентификации управляемого объекта, основанной на аппроксимации его поведения нейросетевой моделью. Обученная на примерах функционирования объекта с системой управления модель, представленная динамической нейронной сетью и моделью регулятора с известной функцией регулирования, эмулирует поведение системы и позволяет получить ее отклик, в том числе и на периодическое испытательное воздействие. По полученной комплексной частотной характеристике находят значения параметров передаточной функции канала. Представлен пример идентификации канала системы управления.
Ключевые слова: объект с системой управления, идентификация, нейронная сеть, моделирование, комплексная частотная характеристика, передаточная функция.
PARAMETRIC CONTROL OBJECTS IDENTIFICATION
WITH DYNAMIC NEURAL NETWORK MODELS
A.G. Shumikhin, A.S. Boyarshinova
Perm National Research Polytechnic University
We develop the identification approach and algorithms for the dynamics of control objects with neural network modeling and active experimentation with the models. The resulting model represented with a dynamic neural network models the behavior of the object and lets us find the object’s output, including outputs for periodic test influences. By the resulting complex frequency response, with the method of least squares we find the parameters of the channel’s transfer function.
Keywords: control object, identification, neural network, modeling, frequency response, transfer function.
Введение. Непрерывные управляемые объекты, в том числе объекты энергетической отрасли, функционируют в условиях постоянного изменения множества различным образом взаимосвязанных величин. Подобные объекты отличаются высоким уровнем автоматизации. В состав специализированного программного обеспечения систем управления такими объектами включаются приложения, позволяющие реализовать управляющие функции, повышающие качество процессов управления, например функцию компенсации разомкнуто-замкнутыми системами регулирования контролируемых возмущений, для настройки которых требуется идентификация соответствующих кана-
лов передачи «вход-выход», например в линейном приближении, передаточными функциями.
Зачастую необходимо идентифицировать определенные каналы объекта, не вмешиваясь в управляемый процесс и не влияя на работу системы регулирования, что исключает множество известных методов активной идентификации объектов [13]. Однако по результатам пассивного эксперимента на объекте с двумя и более каналами передачи не всегда можно получить адекватную модель объекта. Получить достаточно точное математическое описание объекта управления аналитически для сложных объектов с большим количеством взаимосвязанных переменных, управляющих и возмущаю-
38
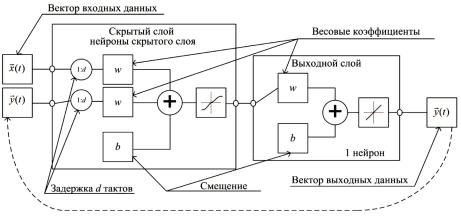
щих сигналов практически невозможно, или это связано с большими материальными и временными затратами [4, 6, 9]. В связи с этим разработка простого способа моделирования подобных систем с достаточной точностью остается актуальной задачей. Одним из эффективных способов является использование методов постобработки измерений [3], например с применением нейронных сетей в качестве инструмента для идентификации взаимосвязей переменных автоматизированных объектов [5, 8, 11, 12]. Класс нейронных сетей, имеющих в своем составе элементы в виде обратных связей, называется рекуррентными сетями и позволяет моделировать поведение динамических объектов [1, 2]. Структура нелинейной автокорреляционной нейронной сети, являющейся рекуррентной сетью с обратной связью и скрытым слоем, представлена на рис. 1.
ВременнÏе задержки входных сигналов и сигналов обратных связей позволяют моделировать поведение инерционных объектов с чистым запаздыванием, каковыми обычно являются управляемые объекты различных отраслей промышленности. Подобные нейронные сети позволяют моделировать поведение системы управления, состоящей из объекта и регулятора.
Модель системы управления состоит из динамической нейронной сети, аппроксимирующей поведение объекта, и модели системы регулирования, позволяющей вычислять значение управляющих воздействий, что необходимо для адекватной работы нейронной сети. Подобная нейросетевая модель позволяет провести на ней опыты активного вычислительного эксперимента, которые невозможны на реальной системе управления в режиме ее эксплуатации, и получить необходимые данные для идентификации каналов объекта передаточными функциями. Например, подавая на соответствующие входы нейросетевой модели периодические испытательные воздействия, можно получить частотные характеристики моделируемого объекта. Для этого проводится ряд экспериментов. В каждом эксперименте на входе идентифицируемого канала нейросетевой модели объекта при застабилизированных остальных входах реализуется периодическое испытательное воздействие. Отклик модели на данное воздействие соответствует определенному значению частоты испытательного воздействия. Зная частоту, амплитуду и сдвиг по фазе испытательного и выходного сигналов находят значения действительной и мнимой частей комплексной частотной
Рис. 1. Структура сети
39

характеристики для данной частоты. По выражению аппроксимирующей передаточной функции находят выражения действительной и мнимой частей аппроксимирующей комплексной частотной характеристики. Зная экспериментальные значения комплексной частотной характеристики на различных частотах и выражения действительной и мнимой частей аппроксимирующей комплексной частотной характеристики, одним из методов нелинейного программирования с целевой функцией метода наименьших квадратов получают параметры, соответствующие передаточной функции [7]:
{Φ(kоб, τзап, a, b) =
N |
|
|
= ∑(Reэ (ων ) −Reап (ων ))2 + |
||
ν=1 |
|
(1) |
N |
|
|
+ ∑(Imэ (ων ) −Imап (ων ))2 → |
||
ν=1 |
|
|
→ min |
→ kоб0 , τ0зап, a0 |
, b0 , |
kоб,τзап,a,b} |
|
|
где kоб0 , τ0зап, a0 , b0 |
− оценки параметров |
|
передаточной функции. |
|
|
Пример идентификации |
каналов |
|
передачи «вход-выход» объекта с за-
паздыванием. Для иллюстрации изложенного подхода к идентификации исследована простая имитационная модель системы управления, состоящая из объекта и регулятора. Объект имеет два входа и один выход и обладает различным транспортным запаздыванием по каналам передачи. Один из входов является управляющим воздействием µ, второй – контролируемым возмущением λ. Выходная управляемая величина y изменяется в результате управляющего воздействия µ, вырабатываемого регулятором, работающим по пропорциональноинтегральному закону регулирования, на основании отклонения управляемой ве-
личины от задания. Структурная схема модели системы представлена на рис. 2.
Рис. 2. Структурная схема модели системы управления
Математическое описание объекта имеет вид
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
y(s) = ∑ yi (s) = |
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
i=1 |
|
|
|
|
|
|
|
|
|
|
|
= Wyλ (s)λ(s) +Wyµ (s)µ (s) = |
|
|||||||||||||||||||
= Wyλ (s)λ(s) +Wyµ (s)Wr (s) × |
|
||||||||||||||||||||
|
|
|
|
|
|
×(u(s) − y(s)) = |
|
|
|
|
(2) |
||||||||||
|
|
|
|
|
|
|
|
|
|
W (s)λ(s) |
|
|
|
|
|
|
|
||||
|
|
|
|
= |
|
|
|
|
|
yλ |
|
|
|
|
+ |
|
|
||||
|
|
|
|
|
|
1 +Wyµ (s)Wr (s) |
|
|
|
||||||||||||
|
|
|
|
+ |
|
Wyµ (s)Wr (s)u(s) |
, |
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
1 +Wyµ (s)Wr (s)) |
|
|||||||||||||
где W |
yλ |
= |
|
|
k1 |
|
e−sτ1 , |
W |
yµ |
= |
|
|
k2 |
|
e−sτ2 , |
||||||
T s + |
1 |
T s +1 |
|||||||||||||||||||
|
|
|
|
|
|
|
|
||||||||||||||
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
2 |
|
|
||||
W (s) = k |
r |
+ |
kr |
, |
|
y(s) − изображение сиг- |
|||||||||||||||
|
|
||||||||||||||||||||
r |
|
|
|
Ti s |
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
нала на выходе объекта; λ(s) − изображение сигнала на контролируемом входе объекта; µ(s) − изображение сигнала на управляемом входе объекта; k – коэффициент передачи объекта по соответствующему каналу; τ – чистое запаздывание по соответствующему каналу; T – постоянная времени объекта по соответствующему каналу; kr – коэффициент передачи регулятора; Ti – постоянная интегрирования регулятора.
В вычислительном эксперименте на модели (2) на входе системы, являющемся контролируемым возмущением
40