

2809.Автоматизация в электроэнергетике и электротехнике
..pdf+1837,0398е3 −461, 4907е4 ).
Исследования показали [2], что если в уравнении алгоритма сигнальной адаптации оставить только один сигнал
z(t) = −hsgn (BтРе) = −hsgn (242,157е1 )
по внешней переменной – частоте вращения свободной турбины nс.т, то кратность изменения параметров может быть существенно повышена, качество регулирования по nс.т также значительно улучшается. Однако в этом случае по эталонной модели настраивается только nс.т, по остальным переменным x = (x1, x2, x3, x4)т переходные процессы существенно отличаются от поведения эталонной модели, что, помимо прочего, ставит вопрос физической реализуемости. Поэтому целесообразно экспериментальным путем установить допустимую кратность изменения переменных (таблица).
Допустимая кратность изменения переменных
|
Удовлетворяет |
Удовлетворяет |
Модели |
критериям |
критериям |
|
качества |
устойчивости |
Линейная |
|
|
модель с |
|
|
адаптивной |
|
|
САУ с одной |
|
|
переменной |
14 |
16 |
Линейная |
|
|
модель с |
|
|
адаптивной |
|
|
САУ с че- |
|
|
тырьмя пере- |
|
|
менными |
8 |
60 |
Нелинейная |
|
|
модель с |
|
|
адаптивной |
|
|
САУ с одной |
|
|
переменной |
8 |
16 |
Нелинейная |
|
|
модель с |
|
|
адаптивной |
|
|
САУ с че- |
|
|
тырьмя пере- |
|
|
менными |
2 |
5 |
Как видим из таблицы, диапазон кратности, удовлетворяющий критериям устойчивости, значительно выше диапазона кратности, удовлетворяющий критериям качества, также выявляем, что диапазон измерений в линейной модели с адаптивной САУ шире, чем в соответствующей ей нелинейной модели.
Постоянная времени ротора турбокомпрессора изменяется от 3 с (на холостом ходе) до 0,5 с (номинальный режим), т.е. его кратность равна 6. Сравним переходный процесс линейной модели с линейной моделью, в которой используется адаптивное САУ (рис. 2–5).
Рис. 2. Переходный процесс частоты вращения свободной турбины с изменением постоянной времени в 6 раз: 1 – линейная модель; 2 – линейная модель с СН
Рис. 3. Переходный процесс частоты вращения турбокомпрессора с изменением постоянной времени в 6 раз: 1 – линейная модель; 2 – линейная модель с СН
51

Добавим в систему нелинейность и установим кратность изменения переменных равной 6 (рис. 7). Также проведем анализ по критериям качества и устойчивости.
Рис. 4. Переходный процесс выхода интегратора регулятора дозатора газа с изменением постоянной времени в 6 раз: 1 – линейная модель; 2 – линейная модель с СН
Рис. 5. Переходный процесс выхода интегратора регулятора свободной турбины с изменением постоянной времени в 6 раз: 1 – линейная модель; 2 – линейная модель с СН
Изменим постоянную времени от 30 до 0,5, т.е. постоянная времени системы будет кратна 60, и проведем в ней анализ критерия качества и устойчивости(рис. 6).
Рис. 6. Переходный процесс частоты вращения свободной турбины с изменением постоянной времени системы в 60 раз: 1 – линейная модель; 2 – линейная модель с СН
52
Рис. 7. Переходный процесс частоты вращения свободной турбины с изменением постоянной времени в 6 раз: 1 – линейная модель; 2 – нелинейная модель с СН
С нелинейной моделью с изменеием постоянной времени в 6 раз система неустойчива. Понизим кратность и проведем дальнейший анализ, пока не достигнем предела, удовлетворяющего критерию качества и устойчивости.
Исследование адаптивной системы регулирования с ограничением.
Как видно из первого эксперимента, необходимо учитывать диапазон изменения параметров, что существенно влияет на результаты адаптации. Кроме того, следует учитывать физические ограничения, среди которых одним из ведущих является ограничение по расходу топлива Gт.
Линейная система с одной пере-
менной. Добавим ограничение в линейную модель по внешней переменной – частоте вращения свободной турбины nс.т (рис. 8).
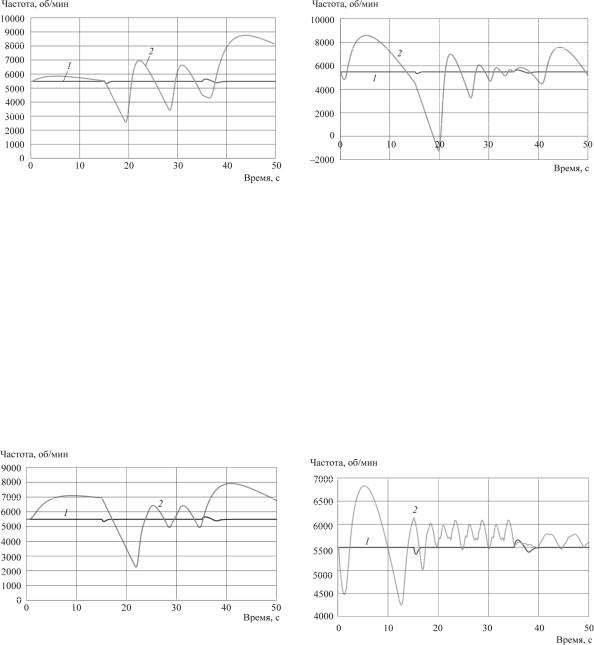
Рис. 8. Переходный процесс частоты свободной турбины (линейная система с одной переменной): 1 – линейная модель; 2 – линейная модель с СН
Линейная система с четырьмя пе-
ременными. Добавим ограничение в ли-
нейную модель с четырьмя переменными в виде x = (x1, x2, x3, x4)т, где x1 = nс.т; x2 = nтк; x3 – выход интегратора регуля-
тора дозатора газа; x4 – выход интегратора регулятора nс.т (рис. 9).
Рис. 9. Переходный процесс частоты свободной турбины (линейная ситема с четырьмя переменными): 1 – линейная модель; 2 – линейная модель с СН
Нелинейная система с одной пе-
ременной. Добавим ограничение в нелинейную модель по внешней переменной – частоте вращения свободной турбины nс.т (рис. 10).
Рис. 10. Переходный процесс частоты свободной турбины (нелинейная система с одной переменной): 1 – линейная модель; 2 – нелинейная модель с СН
Нелинейная система с четырьмя переменными. Добавим ограничение в нелинейную модель с четырьмя пере-
менными |
в |
виде |
x = (x1, |
x2, x3, |
x4)т, |
где x1 = |
nс.т, |
x2 = |
nтк, x3 |
– выход |
ин- |
тегратора регулятора дозатора газа; x4 – выход интегратора регулятора nс.т
(рис. 11).
Рис. 11. Переходный процесс частоты свободной турбины (нелинейная система с четырьмя переменными): 1 – линейная модель; 2 – нелинейная модель с СН
Делаем вывод, что при введении ограничения по расходу топлива ситуация резко ухудшается. Требуются дальнейшие исследования.
Результаты. Методика адаптивного управления с эталонной моделью и сигнальной настройкой [1] в принципе может быть работоспособна при управлении ГТУ. Однако необходимо учитывать
53
диапазон изменения параметров, что |
с адаптивным и модельным управлени- |
|||
существенно влияет на результаты адап- |
ем. – Л.: Энергоатомиздат, 1984. – 216 с. |
|||
тации. Кроме того, следует учитывать |
2. Зиятдинов И.Р., |
Кавалеров Б.В., |
||
физические ограничения, среди которых |
Бахирев И.В. Исследование системы уп- |
|||
одним из ведущих является ограничение |
равления с эталонной моделью и сиг- |
|||
по расходу топлива Gт. При введении |
нальной настройкой для электроэнер- |
|||
ограничения по расходу топлива ситуа- |
гетической газотурбинной установки |
// |
||
ция резко ухудшается. Требуются даль- |
Фундаментальные |
исследования. |
– |
|
нейшие исследования. |
2015. – № 6–2. – С. 1480–1484. |
|
||
Список литературы |
3. Автоматика |
и |
регулирование |
|
авиационных двигателей и энергети- |
||||
|
ческих установок |
/ А.А. Иноземцев, |
||
1. Борцов Ю.А., Поляхов Н.Д., Пу- |
М.А. Нихамкин [и др.]. – М.: Машино- |
|||
тов В.В. Электромеханические системы |
строение, 2008. – Т. 5. – 190 с. |
|
||
54
УДК 620.424.1
ДИНАМИЧЕСКИЕ РЕЖИМЫ РАБОТЫ ПОДСТАНЦИИ
С.А. Бэетрэу, А.Т. Ключников, Н.В. Шулаков
Пермский национальный исследовательский политехнический университет
Исследовались режимы работы подстанции 110/35/6 кВ. Разработана упрощенная схема питания подстанции для моделирования. В процессе моделирования в схеме использовались параметры трехобмоточного трансформатора, а также параметры асинхронного и синхронного двигателей. Для исследования переходных процессов применялся программный продукт MatLab/Simulink. Рассмотрено несколько режимов работы подстанции. Оптимальным вариантом оказался тот, при котором сначала включается синхронный, а потом асинхронный двигатель. В результате исследования определены пусковые токи и напряжения в различных точках эквивалентной схемы.
Ключевые слова: моделирование, энергетика, электропривод, подстанция.
DYNAMIC MODES OF SUBSTATION WORK
S.A. Beetreu, A.T. Klyuchnikov, N.V. Shulakov
Perm National Research Polytechnic University
This article is investigated the modes of operation of the substation 110/35/6kV. Developed a simplified diagram of the power substation for modeling. In the modeling process used in the circuit three-winding transformer, as well as the parameters of induction and synchronous motors. To study the transient use the software MatLab/Simulink. Considered several modes of operation substation. The optimal option turned out, when first switched synchronousthenasynchronous motor. The study determined the starting currents and voltages at various points in the equivalent circuit.
Keywords: simulation, energetic, electric drive, substation.
Введение. Аварийные и внезапные |
теле. Аварийный режим предполагает |
|||||
перерывы электроснабжения потребите- |
питание от одного силового трансфор- |
|||||
лей влекут за собой простой оборудова- |
матора. Вторая секция шин запитана че- |
|||||
ния, затраты на ремонт и снижение каче- |
рез секционный выключатель. На рис. 1 |
|||||
ства выпускаемой продукции. |
представлена упрощенная эквивалентная |
|||||
В настоящие время для анализа пе- |
схема питания подстанции 110/35/6 кВ, |
|||||
реходных процессов используют совре- |
смоделированной в программной среде |
|||||
менные компьютеры. Кроме того, для |
MatLab/Simulink. Схема состоит из од- |
|||||
исследования систем электроснабжения |
ного |
трехобмоточного |
понижающего |
|||
необходимо учесть специфику функцио- |
трансформатора мощностью 6,3 МВА и |
|||||
нирования систем электроснабжения. |
напряжениями Uв = 110 кВ, Uср = 35 кВ, |
|||||
Целью исследования является со- |
Uн = 6кВ. |
На |
средней |
стороне Uср = |
||
вместная работа понижающего силового |
= 35 кВ подключена RL-нагрузка, кото- |
|||||
трансформатора на подстанции и группы |
рая эквивалента мощности 1,6 МВА. |
|||||
электроприводов с помощью программ- |
На низкой стороне Uн = 6 кВ подключе- |
|||||
ной среды MatLab/Simulink, а также ана- |
ны: синхронный двигатель мощностью |
|||||
лиз режимов работы подстанции и выбор |
1600 кВт и напряжением U = 6 кВ; два |
|||||
оптимального режима пуска электрообо- |
эквивалентных |
асинхронных |
двигателя |
|||
рудования на подстанции. |
с мощностями 600 и 260 кВт соответст- |
|||||
Номинальный режим работы пред- |
венно |
и |
напряжением |
на |
статоре |
|
полагает питание от двух силовых |
Uст = 380 В, запитанных через понижаю- |
|||||
трансформаторов марки ТДТН-6300/110 |
щие трансформаторы 6/0,4 кВ мощно- |
|||||
при разомкнутом секционном выключа- |
стью |
720 кВА |
каждый; |
трансформатор |
||
55
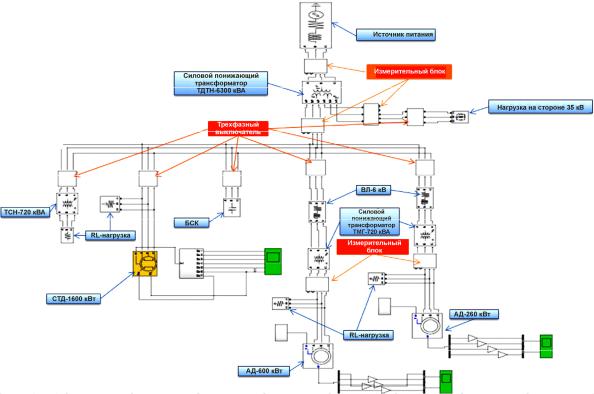
Рис. 1. Упрощенная эквивалентная схема питания подстанции 110/35/6 кВ, смоделированной в программной среде MatLab/Simulink
собственных нужд (ТСН) мощностью |
Uв = 103,5 кВ, |
падение напряжения |
|||||
720 кВА с нагрузкой 630 кВт; батарея |
∆Uв = 2,8 %; на средней стороне напря- |
||||||
статических конденсаторов (БСК) мощ- |
жение составляет Ucр = 32,5 кВ, падение |
||||||
ностью 900 кВАр |
|
напряжения ∆Uср = 3 %; напряжение на |
|||||
Воздушная линия ВЛ 6 кВ задается |
низкой стороне Uн = 5,5 кВ, падение на- |
||||||
в программе Simulink с помощью блока |
пряжения ∆Uн = 2,4 %. При этом потреб- |
||||||
последовательной RL-нагрузки. В про- |
ляемый ток на стороне 110 кВ равен |
||||||
цессе моделирования управление време- |
19 А, что соответствует загрузке транс- |
||||||
нем включения нагрузки осуществляется |
форматора на 60,6 %. Мощность, потреб- |
||||||
с помощью |
трехфазных выключателей |
ляемая по средней стороне 1,6 МВА, при |
|||||
переменного тока. |
|
этом потребляемый ток на стороне 35 кВ |
|||||
Основные режимы работы. Реаль- |
равен 24,5 А, а загрузка трансформатора |
||||||
но в процессе эксплуатации возможны |
составила 25 %. Мощность, потребляемая |
||||||
четыре основных режима: |
на стороне 6 кВ, составила 2,2 МВА, при |
||||||
Первый |
режим. |
Рассматривается |
этом потребляемый ток на низкой сторо- |
||||
режим включения всей нагрузки при |
не равен 210 А, загрузка трансформатора |
||||||
мощности источника питания 26 МВА. |
составила 36 %. |
|
|
||||
Номинальная |
нагрузка |
Sр = 3,81 МВА. |
|
На рис. 2 показаны токи и напря- |
|||
Включение нагрузки происходит одно- |
жения |
потребляемого |
эквивалентного |
||||
временно при t = 1,0 c. |
|
АД |
мощностью |
600 |
кВт, запитано- |
||
Напряжения на шинах трехобмо- |
го |
от |
понижающего |
трансформатора |
|||
точного понижающего силового транс- |
ТМГ-720 кВА через ВЛ 6 кВ длиной |
||||||
форматора ТДТН-6300/110 составляет |
10 км. Из графика видно, что АД, имеет |
||||||
56 |
|
|
|
|
|
|
|
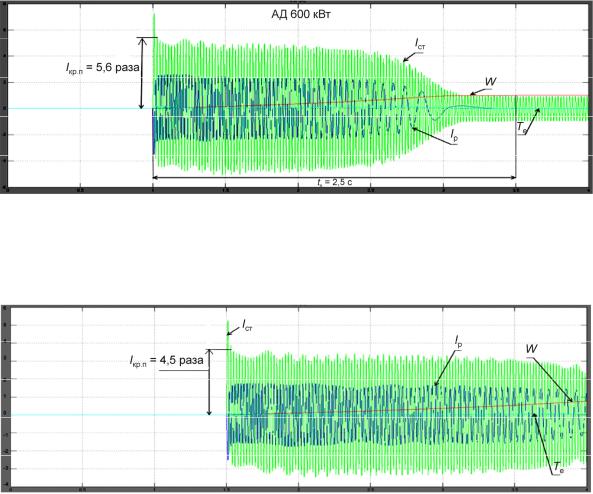
время пуска t = 2,5 c, а кратность пуско- |
составляет Uн = 3,4 кВ, падение |
напря- |
|||||
вого тока составила 5,6 раза. |
|
жения |
составило |
∆Uн = 46,6 %. |
Мощ- |
||
Второй режим. Рассматривается ре- |
ность |
источника |
напряжения 12 МВА, |
||||
жим включения всей нагрузки при мощ- |
при этом потребляемый ток на стороне |
||||||
ности к.з. источника питания 12 МВА. |
110 кВ равен 28 А, на стороне 35 кВ ток |
||||||
При времени t = 1,5 с происходит вклю- |
равен 15,9 А, на стороне 6 кВ – 440 А. |
||||||
чение всей нагрузки. |
|
|
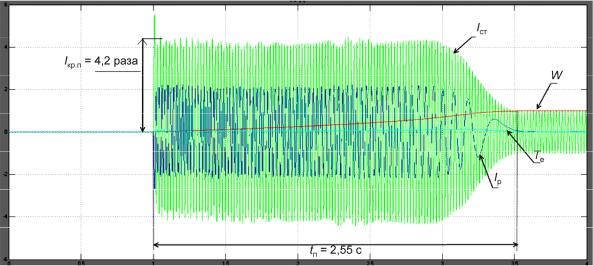
На рис. 3 представлены ток статора |
||||
Напряжение |
на |
шинах |
силового |
и ротора, скорость вращения ротора и |
|||
трансформатора ТДТН-6300/110 на |
электромагнитный момент для двигателя |
||||||
высокой стороне |
Uв = 70 кВ, |
падение |
600 кВт. Из графика видно, что процесс |
||||
напряжения составило ∆Uв = 40 %; на |
на четвертой секунде не установился, |
||||||
средней стороне напряжение Ucр = 21 кВ, |
а напряжение резко возрастает. Крат- |
||||||
падение напряжения |
составило ∆Uср = |
ность пускового тока составила пример- |
|||||
= 44,5 %; напряжение на низкой стороне |
но 4,5 раза. |
|
|
||||
Рис. 2. Ток статора и ротора, скорость вращения ротора и электромагнитный момент для АД мощностью 600 кВт (первый режим)
Рис. 3. Ток статора и ротора, скорость вращения ротора и электромагнитный момент для двигателя 600 кВт при мощности к.з. источника напряжения 12 МВА (второй режим)
57
Третий режим. Рассматривается режим включения всей нагрузки при мощности к.з. источника питания 12 МВА. Включение нагрузки осуществляется ступенчато. Порядок включения:
1)синхронный двигатель (СД-1600)
при t = 0,1 с;
2)асинхронный двигатель (АД-600)
при t = 1,0 c;
3)батарея статических конденсаторов (БСК-900 кВАр) при t = 1,1 c;
4)асинхронный двигатель (АД-260)
при t = 2,0 c;
5) нагрузка |
на стороне |
35 |
кВ при |
t = 2,5 c; |
|
|
|
6) трансформатор |
собственных |
||
нужд (ТСН-720) при t = 3 c. |
|
|
|
Напряжение |
на высокой |
стороне |
|
Uв = 106 кВ, падение напряжения соста- |
|||
вило ∆Uв = 3,6 %; на средней |
сторо- |
||
не напряжение |
составляет |
Ucр = 34 кВ, |
|
падение напряжения ∆Uср = 2,8 %; напряжение на низкой стороне составляет
Uн = 5,9 |
кВ, |
падение напряжения |
∆Uн = 1,6 %. |
|
|
Токи |
на |
шинах трансформатора |
ТДТН-6300/110, мощность источника
питания Sист = 12 МВА. При сравнении со вторым режимом видно, что броски
тока уменьшились на стороне 110 кВ с 28 до 19 А, на стороне 35 кВ остались неизменными, а на стороне 6 кВ уменьшились с 440 до 208 А.
На рис. 4 представлены токи статора и ротора, скорость вращения ротора и электромагнитный момент для двигателя номинальной мощностью 600 кВт при мощности источника напряжения 12 МВА. Включение нагрузки происходит ступенчато. Сравнивая с рис. 3, можно сделать выводы, что процесс установился, при этом время разгона t = 2,55 с, а кратность пускового тока составила примерно 4,2 раза.
Четвертый режим. Рассматривается режим включения всей нагрузки при мощности источника питания 12 МВА. Полная нагрузка Sр = 3,81 МВА. Включение нагрузки осуществляется ступенчато. Порядок включения:
1)асинхронный двигатель (АД-600)
при t = 0,1 с;
2)батарея статических конденсаторов (БСК-900 кВАр) при t = 0,3 c;
3)синхронный двигатель (СД-1600)
при t = 0,5 c;
4)асинхронный двигатель (АД-260)
при t = 0,6 c;
Рис. 4. Ток статора и |
ротора, скорость вращения ротора и электромагнитный момент |
для двигателя 600 кВт |
при мощности к.з. источника напряжения 12 МВА и ступенчатом |
|
пуске (третий режим) |
58

Рис. 5. Ток статора и ротора, скорость вращения ротора и электромагнитный момент для двигателя 600 кВт при мощности к.з. источника напряжения 12 МВА и ступенчатом пуске (четвертый режим)
5) нагрузка на стороне 35 кВ при
t= 2,5 c;
6)трансформатор собственных нужд (ТСН-720) при t = 3 с.
Напряжение на высокой стороне Uв = 101 кВ, падение напряжения составило ∆Uв = 8 %; на средней стороне напряжение составляет Ucр = 32 кВ, падение напряжения составило ∆Uср = 8,5 %; напряжение на низкой стороне составляет
Uн = 5,5 |
кВ, |
падение напряжения |
∆Uн = 8,3 %. |
|
|
Токи |
на |
шинах трансформатора |
ТДТН-6300, мощность источника питания Sист = 12 МВА. Сравнивая с третьим режимом, можно сделать выводы, что броски тока не изменились и составляют 33 А, на стороне 35 кВ остались неизменными, а на стороне 6 кВ возросли с 590 до 595 А.
На рис. 5 представлены токи статора и ротора, скорость вращения ротора и электромагнитный момент для двигателя номинальной мощностью 600 кВт при мощности источника напряжения 12 МВА. Сравнение с данными на рис. 4 позволяет сделать выводы, что процесс установился, при этом время разгона t = 2,6 с, а кратность пускового тока составила более 8 раз.
Заключение. Исследуя режимы эксплуатации подстанции, можно сделать следующие выводы:
Если источник питания обладает запроектированной мощностью, равной 12 МВА, то одновременный запуск невозможен, так как в этом режиме происходят большие падения напряжения, выходящие за пределы нормы. При этом электродвигатели (СД и АД) не могут выйти на номинальный режим работы, т.е. происходит затяжной пуск за счет большого падения напряжения.
В работе исследован ступенчатый пуск с заданной последовательностью включения нагрузки. Наиболее оптимальным режимом при ступенчатом пуске является тот, при котором сначала запускается СД, потом АД и оставшаяся нагрузка, при этом падение напряжения составило 3,6 %, а кратность пусковых токов 5,5 раз. Если запускать СД первым, он генерирует реактивную мощность в сеть. Изменяя последовательность включения нагрузки на подстанции, можно выполнять требования энергосистемы по величине падения напряжения.
Используя данные, полученные в результате моделирования, можно про-
59
извести расчет релейных защит: отходя- |
В.И. Афоннн, Е.А. Соболенская. – М.: |
щих фидеров, трансформатора и элек- |
Энергоиздат, 1982. – 504 с. |
троприводов. |
4. Правила устройства электроуста- |
Список литературы |
новок: все действующие разделы ПУЭ-6 |
и ПУЭ-7. – Новосибирск: Сиб. унив. изд- |
|
|
во, 2008. – 853 с. |
1. Вольдек А.И. Электрические ма- |
5. Справочник по проектированию |
шины: учебник. – 2-е изд., перераб. и |
электроэнергетических систем / под ред. |
доп. – Л.: Энергия, 1974. – 840 с. |
С.С. Рокотяна и И.М. Шапиро. – М.: |
2. Иванов-Смоленский А.В. Элек- |
Энергоатомиздат, 1985. – 352 с. |
трические машины: учебник для вузов. – |
6. Федоров А.А., Каменева В.В. Ос- |
М.: Энергия, 1980. – 928 с. |
новы электроснабжения промышленных |
3. Асинхронные двигатели серии 4А: |
предприятий. – М.: Энергоатомиздат, |
справочник / А.Э. Кравчик, М.М. Шлаф, |
1984. – 472 с. |
60