

2809.Автоматизация в электроэнергетике и электротехнике
..pdf= 2500 А/м; удельные потери P1,5/50 ≤ ≤ 5,0 Вт/кг). Пакет ротора СРД (рис. 1, в) был сделан из стали марки Ст 2412, 0,5 мм (B ≥ 1,5 Тл при H = 2500 А/м;
удельные потери P1,5/50 ≤ 3,1 Вт/кг). Листы ротора были изготовлены путем электроэрозионного вырезания. Сравниваемые машины имеют одинаковую величину воздушного зазора.
а
б
Рис. 2. Испытательный стенд (а) и измеренный КПД экспериментальных образцов АД и СРД в различных режимах (б)
Для проведения экспериментального сравнения рабочих и энергетических характеристик рассматриваемых конфигураций электропривода был разработан испытательный стенд, общий вид которого показан на рис. 2, а. Для корректности сравнительных испытаний для питания всех рассматриваемых двигателей использовался один и тот же промышлен-
ный векторный ПЧ Emerson Unidrive
M 701-034 00031 A. Асинхронный двига-
тель испытывался в режиме скалярного частотного регулирования без компенсации скольжения. СРД испытывался при использовании векторного управления с использованием датчика положения. Во всех случаях была установлена несущая частота ШИМ 4 кГц. На валу СРД, со стороны вентилятора, устанавливается инкрементальный энкодер EH3-25LG8845, сигналы с которого поступают на ПЧ для вычисления скорости и положения вала двигателя. Для возможности одновременного крепления вентилятора и энкодера с торца вала двигателя было выполнено резьбовое отверстие для крепления дополнительной ступени вала. Со стороны выходного конца вала испытуемый двигатель соединяется с валом балансирного индукционного динамометра ID-B-14 (±0,05 Н·м), который позволяет измерять момент на валу двигателя. Обмотка динамометра питается постоянным током. Для измерения токов, напряжений и активной мощности применяются датчики тока
инапряжения на выходе ПЧ, включенные по схеме Арона. В стенде используются датчики LEM (LV 25-P/SP-5, HX 06-P, HX 02-P). Сигналы с датчиков записываются с помощью АЦП QMBox20-16.
Для образцов АД и СРД были выполнены опыты номинальной нагрузки. Для образца СРД также были выполнены опыты нагрузки 0,75 кВт, 3000 об/мин
и1,1 кВт, 3000 об/мин для оценки возможности продолжительной работы в этих режимах. Для достижения установившейся температуры двигатели продолжительно работали с заданной нагрузкой. По данным испытаний было проведено сопоставление рабочих характеристик двигателей. Для примера на рис. 2, б показаны зависимости КПД АД
иСРД от нагрузки после длительной работы в номинальном режиме. С помощью термодатчиков, встроенных в об-
91
мотку статора, было подтверждено, что температура СРД при длительной работе не превысила допустимую температуру класса изоляции.
На основе данных испытаний в ходе исследования было подтверждено, что рассматриваемый образец СРД имеет класс энергоэффективности IE4 при длительной работе в режиме 750 Вт, 3000 об/мин и класс IE3 в режиме 1100 Вт, 3000 об/мин. Таким образом, разработанный двигатель может использоваться как двигатель самого высокого класса IE4 в стандартных габаритах IE2 асинхронного двигателя либо как малогаба-
ритный двигатель класса IE3 при работе на повышенную мощность (снижение массы на 20 % в сравнении с IE2 АД, 1100 Вт, 3000 об/мин).
Список литературы
1.Estima J., Cardoso A.J.M. Efficiency analysis of synchronous reluctance motors // International Conference on Engineering – ICEUBI, 27–29 November 2013.
2.IEC 60034-30-1. Ed. 1.0. Rotating electrical machines. Part 30-1 / Efficiency
Classes of Line Operated AC Motors
(IE Code). – Geneva, 2014.
92
УДК 621.313.33
ЭКСПЕРИМЕНТАЛЬНАЯ САМОУРАВНОВЕШЕННАЯ КАРТОФЕЛЕСОРТИРОВАЛЬНАЯ УСТАНОВКА
С ЛИНЕЙНЫМ АСИНХРОННЫМ ЭЛЕКТРОПРИВОДОМ
А.В. Линенко, Т.И. Камалов
Башкирский государственный аграрный университет, Уфа
Одной из актуальных проблем в установках с колебательным движением рабочего органа является проблема уравновешивания инерционных масс. Разработка установок двухстороннего действия с электроприводом в виде линейного асинхронного электродвигателя с упругими накопителями механической энергии позволит решить эту проблему.
Ключевые слова: сортировка, линейный асинхронный двигатель, картофель, экспериментальная установка.
THE EXPERIMENTAL SELF-BALANCED POTATO-SORTING SYSTEM
WITH LINEAR ASYNCHRONOUS ELECTRIC DRIVE
A.V. Linenko, T.I. Kamalov
Bashkir State Agrarian University, Ufa
One of the actual problems in the devices with oscillation of working part is the equilibration of inertial mass. The solution to this problem is the development of the devices with double-sided operation which consist of the linear induction motor with springs.
Keywords: sorting, linear induction motor, potatoes, experimental system.
Современные требования к машинам для послеуборочной обработки сельскохозяйственной продукции заключаются в повышении производительности, надежности и качества обработки с уменьшением затрат на топливо, металл, труд и энергию на объем обработанной продукции. Это достигается путем совершенствования технологических приемов и создания высокопроизводительных, надежных и экономически оправданных машин.
Анализ устройств послеуборочной обработки картофеля показал, что разработанные устройства либо не обеспечивают очистку и сортировку, либо имеют сложную конструкцию и ненадежны в работе [2].
Одним из перспективных направлений в послеуборочной обработке картофеля является создание надежных и экономически оправданных установок с
применением линейного асинхронного электропривода. Последний позволяет получить непосредственно поступательное движение без каких-либо преобразователей вида движения [1]. Однако колебания массивных рабочих органов сопровождаются значительными динамическими нагрузками, которые вызывают вибрацию рам машин, превышающую в 2–3 раза допустимые нормы, искажение кинематических параметров, нарушение технологического процесса, снижение производительности машин, сокращение срока эксплуатации и потерю урожая.
При использовании в качестве привода рабочего органа линейного электропривода компенсация колеблющихся инерционных масс становится затруднительна, при наличии других достоинств по сравнению с приводом от двигателя вращения [1]. В связи с вышесказанным
93

нами предлагается самоуравновешенная |
управления 10 подключает индуктор 2 |
|||||
инерционная картофелесортировальная |
ЛАД к источнику питания, индуктор |
|||||
установка |
двухстороннего действия на |
создает бегущее магнитное поле, ротор 3 |
||||
базе линейного асинхронного электро- |
приходит в поступательное движение, |
|||||
привода, в которой решается поставлен- |
например вниз (рис. 1, б). При этом ры- |
|||||
ный вопрос. |
|
чаги 4, шарнирно связанные и с ротором, |
||||
Предлагаемая установка |
содержит: |
и с ветвями рабочего органа, расходятся. |
||||
основание 1, цилиндрический линейный |
Ветви рабочего органа совершают про- |
|||||
асинхронный электродвигатель (ЛАД), |
дольное |
движение в |
противоположных |
|||
состоящий из индуктора 2, установлен- |
направлениях. При движении ротора 3 |
|||||
ного жестко на основании 1, и ротора 3, |
упругий элемент 7 деформируется (сжи- |
|||||
соединенного шарнирно через рычаги 4 |
мается). По достижении выступом на ро- |
|||||
с ветвями рабочего органа 5 (рис. 1, а). |
торе датчика 9 блок управления отключа- |
|||||
Продольная ось ЛАД перпендикулярна |
ет ЛАД, его бегущее магнитное поле ис- |
|||||
продольной оси рабочего органа. Ветви |
чезает, |
картофель |
по |
инерции |
||
рабочего органа установлены на роли- |
продолжает движение вперед. Под дейст- |
|||||
ках 6 на основании 1. С другой стороны |
вием потенциальной энергии, накоплен- |
|||||
ротор 3 взаимодействует с упругим эле- |
ной в упругом элементе 7, ветви рабочего |
|||||
ментом 7. Включение и отключение |
органа 5 движутся в обратном направле- |
|||||
ЛАД осуществляется по датчикам 8 и 9 |
нии, и по достижении ротором датчика |
|||||
блоком управления 10. |
|
положения 8 ЛАД снова подключается к |
||||
Картофелесортировальная |
машина |
сети. Далее описанный процесс повторя- |
||||
работает |
следующим образом. Блок |
ется. При этом рабочий орган 5 совершает |
||||
а
б
Рис. 1. Картофелесортировальная установка двухстороннего действия с линейным асинхронным электроприводом
94
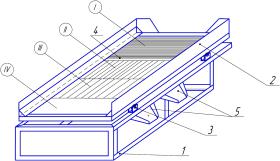
колебательное движение, а картофель, подаваемый на рабочий орган, инерционно перемещается по нему. Рабочий орган представляет собой участки из прутков (рис. 2): I – участок очистки от мелких примесей (поперечные прутки); II – участок сортировки (мелкая фракция); III – участок сортировки (средняя фракция); IV – участок сортировки (крупная фракция). Сортировка корнеплодов по размеру обеспечивается за счет установки поперечных прутков на необходимом друг от друга расстоянии. Таким образом, картофель, инерционно перемещаясь по ветвям рабочего органа, сначала очищается от мелких примесей на I участке, где прутки расположены с небольшим расстоянием между собой перпендикулярно направлению движения картофеля. Далее картофель поступает на II участок сортировки мелкой фракции, где прутки расположены параллельно направлению движения картофеля с соответствующим расстоянием между собой. Аналогично устроен III участок сортировки средней фракции. Окончательным сходом с рабочего органа будет крупная фракция картофеля (участок IV).
Рис. 2. Ветвь рабочего органа картофелесортировальной машины: 1 – основание; 2 – рама рабочего органа; 3 – ролики; 4 – прутки; 5 – лотки
Предложенная установка является самоуравновешенной за счет того, что рабочий орган представляет собой две
одинаковые ветви, которые приводятся в действие одним линейным асинхронным электроприводом. Ветви рабочего органа совершают движение в противоположных направлениях. Это позволит свети к минимуму динамические нагрузки на раму и привод установки. Такой способ привода рабочего органа линейным асинхронным электродвигателем позволяет повысить энергетические характеристики установки в целом.
На кафедре электрических машин и электрооборудования Башкирского ГАУ была выполнена описанная установка с линейным асинхронным электроприводом (рис. 3). Для ее всестороннего исследования была разработана методика экспериментального исследования. В качестве электромеханических определяющих параметров электропривода приняты ток, потребляемый индуктором ЛАД во время работы, и амплитуда колебательного движения рабочего органа.
На установку были смонтированы следующие активные датчики: датчик линейных перемещений Gefran LTS09N09KB5C и датчик тока марки CSLA1CF. Датчик тока основан на эффекте Холла с пределом измерения 100 А на переменном и постоянном токе. Сигнал с датчиков – напряжение, пропорциональное физическому изменению измеряемой величины, регистрируется двухканальным аналого-цифровым пре-
образователем Velleman PCS64L.
Установлены оптимальные длины участков очистки и сепарации картофеля исходя из максимальной производительности и скорости транспортирования не более 2 м/с. При скорости транспортирования более 2 м/с возможно повреждение клубней картофеля. Длина участка очистки составила 0,5 м, длины участков сортировки мелкой и средней фракций составили 0,6 м.
95

Рис. 3. Экспериментальная самоуравновешенная картофелесортировальная установка с линейным асинхронным электроприводом
|
Конструкции |
технологических ма- |
нологической машины, что соответству- |
|
шин с колебательным электроприво- |
ет новейшим тенденциям |
развития |
||
дом |
в течение последнего десятка лет |
техники. |
|
|
не совершенствовались, с чем связаны |
Список литературы |
|
||
не только огромные потери продукции, |
|
|||
но и большие затраты на энергоносители |
|
|
||
и обслуживание. Всё это позволяет счи- |
1. Аипов Р.С., Линенко А.В. Линей- |
|||
тать, что применение линейного асин- |
ные электрические машины и линейные |
|||
хронного электропривода в самоуравно- |
асинхронные электроприводы |
техноло- |
||
вешенной установке для послеубороч- |
гических машин: монография / Баш. гос. |
|||
ной |
обработки |
картофеля является |
аграр. ун-т. – Уфа, 2013. – 308 с. |
|
эффективным средством совершенст- |
2. Петров Г.Д. Картофелеуборочные |
|||
вования его очистки, сушки и сортиров- |
машины: учебник. – М.: Машинострое- |
|||
ки, а также повышения надежности тех- |
ние, 1984. – 320 с. |
|
||
96
УДК 621.313.333 = 111
INDUCTION MOTOR WITH SALIENT POLE ROTOR
AND ALL COILS PLACED ON THE STATOR
S.P. Gladyshev1, E.V. Lyubimov2, I.S. Okrainskaya3, P.S. Gladyshev4
1Michigan-Dearborn University, USA
2Perm National Research Polytechnic University
3South Ural State University (National Research University), Chelyabinsk
4University College Dublin, Ireland
The design and a principle of operation of the induction motor, with a salient pole rotor, having all windings placed on the stator is considered in the paper.
Keywords: induction motor, phase machine, immobile rotor, stator.
Introduction. The three phase induction motor [1, 3, 4] has a very simple design. It is reliable and law cost electrical machine. The induction motors find broad application in industrial, commercial and domestic electric drivers. However, the squirrel cage induction motor has very low start torque and very high start current. The high value of the start current overheats the motor windings and decreases the motor efficiency. In the squirrel cage induction motor, the short circuited rotor winding is not controllable. The wound rotor induction motor enables a rotor winding current control. But the rotor slip rings increase maintenance, reduces the motor reliability and increase the motor external dimension. In the single phase induction motor, the single phase winding with AC current creates only a pulse magnetic field. The pulse magnetic field does not create starting mechanical torque. This phenomenon is explained by representation the pulse magnetic field by two magnetic field rotation in opposite direction with the same speed. So, the one rotating field creates a mechanical torque which is in the opposite direction of the other. This torques is equal at the rotor standstill and motor does not create the start torque. If a rotor rotates by external mover in a one direction, the opposite direction torque decreases because of increased fre-
quency and reactive impedance, and the motor creates rotating torque in the same direction. In general, the single phase induction motor has two separate stator windings displaced in space by ninety degrees and squirrel-cage winding on the rotor.Sinusoidal voltage source is connected to one winding, but to the another winding the AC voltage source is connected through phase shifting circuit: capacitor or inductor. As a result, the rotating magnetic field is produced in the stator core. Rotation magnetic field induces current in short circuited rotor winding. The rotor current and a rotating magnetic field create start mechanical torque. The torque spins the rotor. Now, let us consider induction mode operation in the electrical machine with DC stator excitation [2].
Theoretical background for realization induction mode operation in a machine with salient pole rotor. Consider simple electrical machine with DC stator excitation Fig. 1. There are two coils in the stator. One coil AA’ is coil excitation and another coil BB’ is output winding. These coils are perpendicular to each other.
Let rotor spins with constant velocity ω by external primary mover. Magnetic field excitation F of the coil AA’ will rotate by the rotor and produce electromotive force in output coil BB’ Fig. 1. During one rotor
97
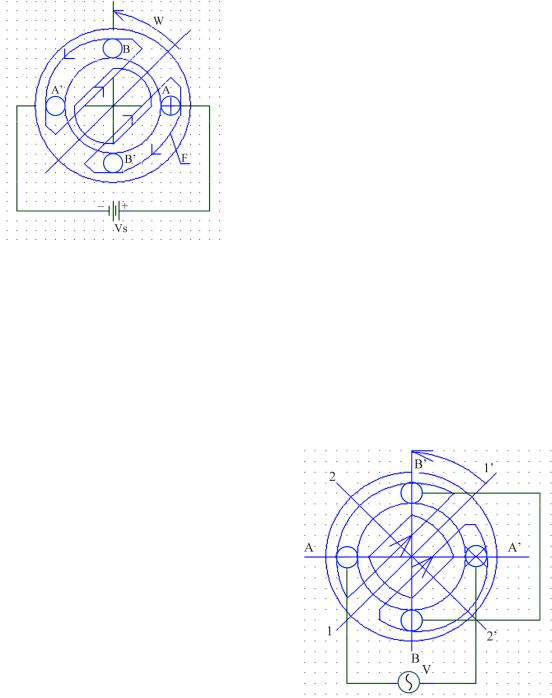
Fig. 1. One phase machine with DC stator excitation
revolution, the output coil BB’ produces two periods of voltage. With position of the output winding, the considered generator behaves like a generator with permanent magnet. If we connect a load resistor to output winding, the load current produces a break torque applied to the rotor. It is known, that any electrical machine is reversible. If theoretically, we apply to the output winding the external voltage, the same frequency and in opposite phase with output voltage, the electrical machine will operate in the generator or in the motor mode. It dependence if the amplitude of external voltage is higher or less than induced voltage. If applied voltage is higher, the machine will work as a motor, if it is less, the machine will operate as a generator. This situation is exactly like in DC motor. So, we can realize in this machine the DC motor and DC generator modes [2]. For DC motor mode realization, in [2] it was used sensor of rotor position, DC voltage source, and transistor switcher. So, the spinning salient pole rotor (without windings) and winding placed on the stator with DC excitation, behave like a spinning permanent magnet.From this point view, the considered machine operates also as a synchronous one phase machine. If it works as a synchronous machine, we can suppose that
it can work as an induction motor. In the induction mode operation, one coil should be connected to external alternative current (AC) source and another winding should be short circuited like in regular induction machine. But in considered machine both coils placed on the stator. Haw it will operate in this case? How it will work with salient pole rotor which is without winding? We need to answer on these questions.
Single-phase machine with AC stator excitation. The single-phase machine with AC stator excitation in induction mode operation is depicted on Fig. 2. The salient pole rotor has no windings. The rotor is a laminated iron core. The stator contains two identical windings spaced 90 degree apart. In the induction mode operation, the exciting winding AA’ is connected to alternating current source and the winding BB’ is short circuited.
Fig. 2. Single-phase machine with AC stator excitation in induction mode operation
Mechanical torque in different immobile rotor positions. Consider a case when the rotor is no spinning. In this machine, AC magnetic field is created by the primary coil AA’ and can be moved by the rotor poles when rotor change position. Like in a transformer, electromotive force is induced in the winding BB’. The trans-
98
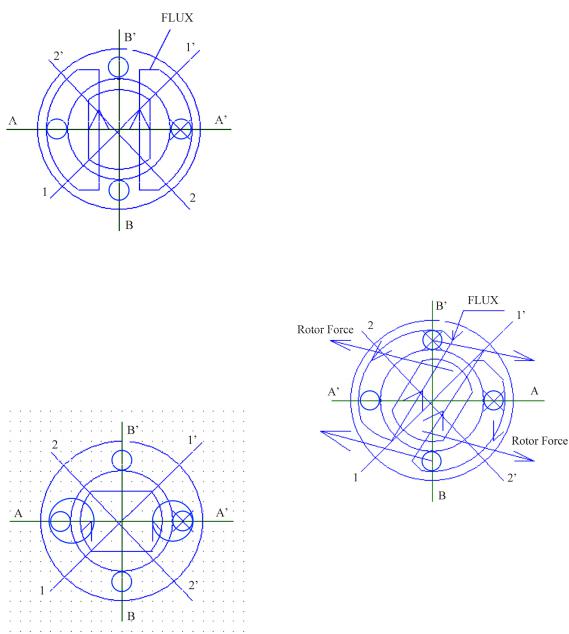
formers voltage induced in the coil BB’ depends from the rotor position. In the rotor axis position along line BB’ Fig. 3, voltage does not induced because magnetic flux does not passes through the coil BB’.
Fig. 3. Rotor axis is disposed along winding BB’. Magnetic flux does not cross coil BB’ and electromotive force does not induced in the coil
In the rotor axis position along line AA’, Fig. 4, voltage does not induced also because magnetic flux does not passes through the winding BB’.
In the rotor axis position along line 11’ Fig. 3, 4, the voltage amplitude, induced in winding BB’, is maximum because, maximum flux passes through the winding. In the axes rotor positions inside of the next two quarters, the voltage phase in the winding BB’ is changed on 180 degrees because the flux changes direction in winding BB’. In the considered mode operation, the machine operates as a transformer with variable transformer ratio.
Let consider ideal case, when the short circuit current in the winding BB’ has the same phase as electromotive force. Fig. 5 depicts a current carrying conductor in the magnetic field. As a result, the forces appears applied to the rotor poles and winding. These forces produce a mechanical torque.
Fig. 4. Rotor axis is disposed along winding AA’. Magnetic flux does not pass through winding BB’ and electromotive force does not induced
In the other rotor axis positions, between lines AA’ and BB’, the voltage is induced in the winding BB’. A value of the induced voltage in winding BB’ depends from the rotor axis position Fig. 2.
Fig. 5. Mechanical torque applied to the rotor
The forces exist between current caring conductors and magnetic field delivered by the rotor poles. The conductors are fixed in the stator and cannot move. The forces applied to the magnetic field of the rotor poles and move the rotor. According the BLI law, a torque produced by the machine is proportional production of the magnetic flux density, of winding AA’, and a current in winding BB’. The torque is proportional to square of applied voltage, because the current and flux are proportional voltage. In the next half period of input AC voltage, the poles flux and induced current change
99

direction but the direction of torque do not changes. The torque exists until rotor moves into stable position. Fig. 5 illustrates only the idea of the torque creation. It is need to know values and direction of torque distribution in the different rotor not moving positions. Fig. 6 depicts the distribution of torque in different not moving rotor positions along internal stator circumference. Horizontal arrows, inside torque curve, indicate direction of torque. According this direction, rotor moves from any position into one of the two stable positions along lines (AA’ or BB’). In these stable positions, electromotive force and torque are zero. Rotor in these positions can stay long time. Positions 11’ and 22’ are not stable like in an inverse pendulum. The rotor movement in one of stable position is possible if the output coil BB’ is short circuited. That is proving that considered machine works in an induction mode operation. We see that, one phase machine with AC stator excitation do not produce spinning starting torque but moves the rotor in one of the stable positions AA’, or BB’. That is because the direction of the AC excitation magnetic field axis is immobilized in the stator.
Fig. 6. The torque distribution along inside stator periphery. Arrows inside torque curve indicate direction of torque
Single-phase regular induction motors with immobile rotor. For a comparison, consider single phase wound-rotor induction motor with immobile rotor position Fig. 7, a, b. The stator excitation winding AA’ is connected to AC voltage source. The short circuited winding is on the rotor. Fig. 7 depicts two different rotor positions around axis BB’.
a
b
Fig. 7. Single-phase wound rotor induction motor with different stationary rotor position
The mechanical forces are created under short circuited current, in the rotor winding, and magnetic flux of excitation. The forces create mechanical torque which moves the rotor in position close to axis BB’. In the position BB’, the excitation flux does not crosses winding and do not produce electromotive force and torque. According Lentz’s law, the rotor takes position in which the change of magnetic flux in the
100