

2809.Автоматизация в электроэнергетике и электротехнике
..pdfrotor winding is eliminated. The value of current in the excitation winding reduces with eliminating short circuit current in rotor winding. The rotor axes and magnetic flux axis cannot be in the same line because in this case the torque is zero. So, the sin- gle-phase wound rotor induction motor behaves as considered before the motor with two winding placed on the stator and salient pole rotor.
Consider the single-phase squirrel cage induction motor Fig. 8
Here, winding excitation AA’ is connected to DC voltage source Vs. The output winding BB’ is short circuited. Let rotor is spinning by external primary motor with speed ω in an opposed clock wise direction as indicated in picture. In output winding is induced voltage which create current in short circuit. This current is in magnetic flux mowed by the rotor pole. Mechanical force appears between immobile winding and moved rotor pole.Winding is fixed in stator slots.
Fig. 8. Single-phase squirrel-cage induction motor with stationary rotor position
Fig. 9. One phase machine with DC stator excitation
In squirrel cage motor, the conductors of rotor winding placed symmetrically around the rotor periphery. Fig. 8 depicts direction currents and forces in rotor bars. The sum of the forces equal zero. There is not starting or moving torques. But in this case, the current is very high in the excitation winding. Because, currents in right side and left side of rotor conductors create torques which is in opposite direction to each other and do not move rotor to eliminate electromotive forces. Here, we see difference between the single-phase considered machine with two coils placed in the stator and the squirrel cage induction motor.
Induction mode operation in electrical machine with dc stator excitation.
Consider the simple one phase electrical machine with DC stator excitation Fig. 9.
Force acts on rotor pole creating break torque applied to rotor. In this mode, the machine operates in generator mode. Shot circuit current in output winding create a torque which is a break toque in generator mode operation.
Now, consider the case when DC voltage source is disconnected, the rotor is immobilized but magnetic flux theoretically spins in the same direction Fig. 10. In this case, we can imagine that immobilized rotor spins in opposed direction in relative to magnetic flux. Again, the machine operates in generator mode, and short circuit current creates a break torque for this generator. This torque moves the rotor poles in the direction of rotation magnetic field. That is exactly the induction mode operaion in the electrical machine with the salient pole rotor.
101
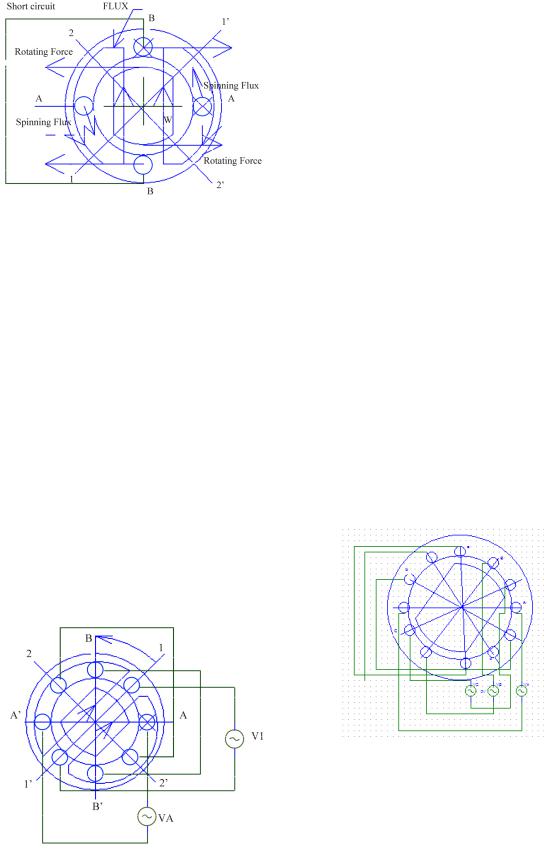
Fig. 10. Induction mode operation in electrical machine with DC stator Excitation
For practical realization of this mode, it is need to know how to create rotation magnetic field and short circuited (output) coils in an internal stator circumference.
Two-phase induction motor with short circuited and excitation windings placed on the stator. In two phase induction motor, external voltage sources should be shifted ninety degrees from each other.For creation rotating (running) magnetic field the excitation winding should be placed in space ninety degrees also. Because machine with DC stator excitation generate two periods during one rotor tern, the angle between two coils should be forty five degrees. Two-phase induction motor
with two short circuit windings and two excitation windings placed on the stator is shown in Fig. 12.
In Fig. 11, the excitation windings are placed along lines AA’ and 11’, and the output windings are placed along lines BB; and 22’.
Three-phase induction motor with short circuited and excitation windings placed on the stator. In three phase induction motor, external voltage sources should be shifted one hundred twenty degrees from each other. For creation rotating magnetic field the excitation winding should be placed in space one hundred twenty degrees also. Because the generator with DC stator excitation generate two periods during one rotor tern, the angle in space between two coils should be sixty degrees. The induction motor with the three short circuit windings and three excitation windings placed on the stator are shown in Fig. 12.
In Fig. 12, the excitation windings are placed along lines A, B, and C and the output windings are placed along lines a; and b, and c.
Fig. 12. Three-phase induction motor with three short circuit windings and three excitation windings are placed on the stator
Fig. 11. Two phase induction motor with two short circuit windings and two excitation windings are placed on the stator
102
Experimental verification. The purpose of experimental verification is the proving of the induction mode operation in the machine where short circuited winding and excitation winding placed on the stator
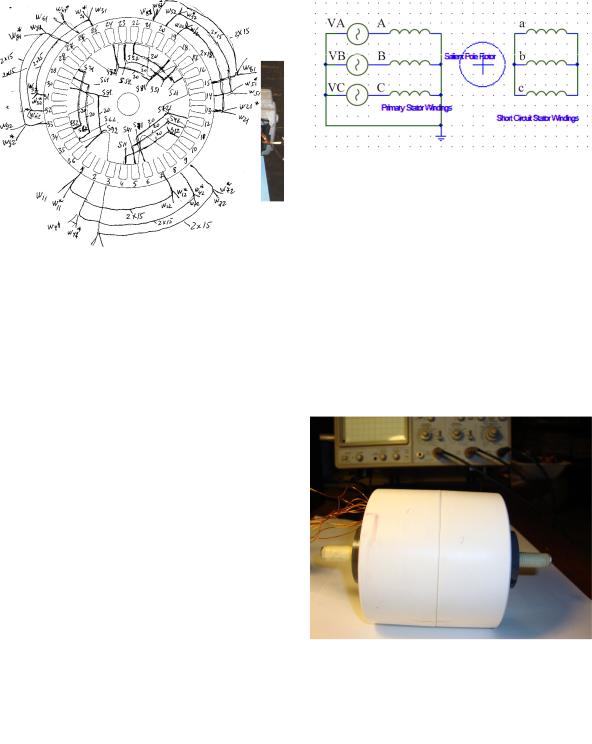
and where the salient pole rotor does not have windings. Experimental three phase electrical machine is depicted on Fig. 13 (right side). On the left side, there is a regular induction machine which is used as a motor or as a load for experimental machine. The six pole rotor machine has a salient poles design without windings Fig. 14. The rotor and stator core are laminated
The electrical circuit of experimental three phase machine is depicted on Fig. 15. AC voltage sources are connected to the excitation (primary) windings A, B, and C. The output windings a, b, and c are short circuited.
Fig. 13. Three phase experimental machine (on right side) and regular induction motor (left side)
There are three machines placed in the stator. Two poles and two winding are used in each machine. Each machine has excitation winding (Primary) and short circuited. The winding excitation and short circuited are shifted by ninety electrical degrees. The same type of windings of three different machines is connected in series. The maximum synchronous speed in the machine is 600 rev / min if AC frequency is 60 Hz.
Fig. 15. Experimental electrical circuit of the three phase induction motor with all winding placed on the stator
The experimental verification confirms that three phase motor is spinning. This experiment is proving the possibility design of an induction motor with both windings the excitation and the short circuited is placed on the stator and with the salient pole rotor without windings. Experimental two phase electrical machine is depicted on Fig. 16.
Fig. 16. Two phase experimental induction machine with all winding placed on the stator and rotor is without windings
Fig. 14. Distribution windings in the stator of the three phase experimental machine
The electrical circuit of experimental two phase machine is depicted on Fig. 17.
103
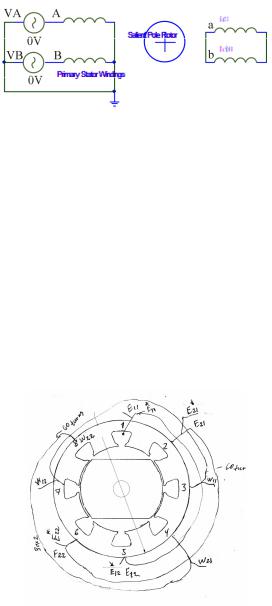
Fig. 17. Experimental electrical circuit of the two phase induction motor with all winding placed on the stator
Fig. 18 shows distribution of windings in the stator of the two phase experimental machine. The experimental verification of the two phase machine also confirms that two phase induction motor is spinning. This experiment is proving the possibility design of two phases an induction motor with both windings the excitation and the short circuited is placed on the stator and with the salient pole rotor without windings.
Fig. 18. Distribution of windings in the stator of the two phase experimental motor
Summary. The theoretical possibility of design induction motor with both: excitation and short circuit winding placed on the stator and with salient pole rotor without winding is described.
The considered machine has advantages: Short circuit winding placed in the stator enables control the short circuit current, facilitate of the motor cooling condition, and in some cases increase value of start / rated current ratio. The rotor of this machine has less weight than regular induction motor.
104
Experimental verification confirms design possibility of the induction motor with salient pole rotor and with both windings excitation and short circuited placed on the stator.
References
1. Electric machines: theory, operation, applications, adjustment, and control. – 2nd ed. – NJ: Prentice Hall Upper Saddle River, 2002.
2.Gladyshev S., Mi C., Okrainskaya I. One phase machine with DC stator excitation // SAE Technical. – 2010. – Paper 2010-01-0489. DOI: 10.4271/2010-01-0489
3.Walker J.H. The theory of the inductor alternator // Proc. IEE. – 1942. – Vol. 89. – P. 227–241.
4.Ramshaw R., van Heeswijk R.G. Energy conversion, electric motors and generators. – Sauders College Publishing, A Division of Holt, Rinehart and Winston Inc., 1990.
УДК 621.313.8
ИССЛЕДОВАНИЕ МОМЕНТА ВЕНТИЛЬНЫХ МАШИН С ЦЕЛЫМ И ДРОБНЫМ ЧИСЛОМ ПАЗОВ НА ПОЛЮС И ФАЗУ
С.А. Ганджа, А.И. Согрин, И.Е. Киесш
Южно-Уральский государственный университет (Национальный исследовательский университет), Челябинск
Оцениваются величины моментов и уровни их пульсаций для двух двигателей с одинаковыми главными размерами и разными обмотками якоря: с целым и дробным числом пазов на полюс и фазу. Для исследований используются конечно-элементные модели магнитных полей в рабочих объемах рассматриваемых двигателей.
Ключевые слова: вентильный двигатель, пульсации момента, реактивный момент, дробная зубцовая обмотка, метод конечных элементов.
INVESTIGATION OF ELECTROMAGNETIC TORQUE
OF BRUSHLESS PERMANENT MAGNET DC MOTORS
WITH INTEGER-AND FRACTIONAL-SLOT WINDINGS
S.A. Gandzha, A.I. Sogrin, I.E. Kiessh
South Ural State University (National Research University), Chelyabinsk
The amount of torque and torque ripple for two brushless DC motors with the same size and different armature windings are estimated. Electric motors with integer and fractional number of slots per pole and phase are considered and compared. The finite element method is used to simulate the electromagnetic field in the volume of the motors, and calculating their properties.
Keywords: brushless DC motor, torque ripple, cogging torque, fractional-slot winding, finite element method.
Вводные замечания. Вентильные электроприводы постоянного тока динамично развиваются в течение ряда лет. В настоящее время можно наблюдать новый интенсивный виток их развития. Это связано с появлением и промышленным освоением мощных, относительно недорогих высококоэрцитивных магнитов, развитием силовой электроники.
По своей природе электрическая машина – достаточно консервативный элемент привода, который совершенствуется медленнее, чем электронные компоненты и программная логика управления. Тем не менее оптимизация этой части очень важна, так как именно двигатель во многом определяет энергетические и массогабаритные показатели электропривода в целом.
Одной из последних тенденций является применение машин с дробным
числом пазов на полюс и фазу [4]. Если несколько десятилетий назад такие решения использовались для маломощных устройств, то в настоящее время появляются достаточно мощные электроприводы с подобными машинами [6, 7, 9]. В подтверждение этого можно сослаться и на научные работы кафедры электромеханики и электромеханических систем энергетического факультета ЮУрГУ [2, 3]. Среди них можно выделить разработки приводов для транспортных средств, радаров системы навигации.
Следует отметить, что теория анализа и синтеза рассматриваемых преобразователей отстает от требований практики, что связано со сложностью электромагнитных процессов в машинах с дробным числом пазов на полюс и фазу. В научной среде можно наблюдать активные споры по поводу эффективности
105
применения таких машин. Данная статья направлена на частичное разрешение этих споров. Исследование проведено с использованием современного программного средства конечно-элемент- ного анализа электромеханических и электромагнитных устройств ANSYS Maxwell.
Постановка задачи. Основной за-
дачей данной работы является исследование влияния дробности обмотки на величину и пульсации электромагнитного момента вентильного двигателя.
В качестве объекта исследования выбран серийный электродвигательДБ72 (вариант 1) производства ОАО «Миассэлектроаппарат» (г. Миасс). Паспортные характеристики двигателя представлены ниже. Число пазов статора двигателя 18, число полюсов индуктора 20. Таким образом, двигатель выполнен с дробным числом пазов на полюс и фазу q = 3/10. Двигатель имеет обращенную конструкцию: якорь расположен внутри, вращающийся индуктор – снаружи.
Паспортные данные двигателя ДБ-72:
Номинальная мощность, Вт |
25 |
Номинальное напряжение |
|
постоянного тока, В |
24 |
Номинальная частота |
|
вращения, об/мин |
1000 |
Номинальный ток, А |
2,5 |
Номинальный момент, Нм |
0,25 |
Число фаз |
3 |
Схема соединения фаз |
Y |
В качестве альтернативного варианта (вариант 2) был принят специально спроектированный двигатель с целым числом пазов на полюс и фазу, имеющий одинаковые с базовым двигателем главные размеры. Индуктор альтернативного двигателя такой же, как у базовой модели. Статор имеет число пазов на полюс и фазу q = 1. При этом число пазов машины
z = 2 p m q = 20 3 1 = 60,
где p – число пар полюсов индуктора; m – число фаз обмотки якоря. Отметим, что для данных размеров и полюсности машины число q = 1 оказалось максимально возможным по конструктивным соображениям: увеличение числа пазов недопустимо измельчает размеры зубцов статора.
Для корректности сравнения число ампервитков фаз рассматриваемых двигателей было принято одинаковым (180 витков в фазе, токи фаз – номинальные согласно паспорту на базовый двигатель). Суммарные площади пазов и зубцов у рассматриваемых двигателей соответственно одинаковы.
Расчетные модели. Расчет магнит-
ного поля в активных объемах двигателей проводился методом конечных элементов в 3D-постановке задачи. Это позволило учесть при анализе возможный скос пазов статора. Построенные модели двигателей учитывают нелинейность свойств ферромагнитных материалов, изменение электромагнитных величин во времени, движение частей машины друг относительно друга. В качестве материала сердечника статора была выбрана сталь 2212, для сердечника ротора – сталь 3. Магниты выполнены из сплава NdFeB, коэрцитивная сила по индукции Hc = 890 кА/м, остаточная индукция Br = 1,23 Тл. Материал обмоток – медь.
Питание фаз двигателей осуществлялось от источника тока, что позволило исключить из числа влияющих на электромагнитный момент факторов сопротивление якорной цепи. Соответственно, для 120-градусной коммутации (на каждом межкоммутационном интервале работают две фазы, а третья отключена) были заданы постоянные токи (номинальный паспортный ток) для фазы А
ифазы С с соответствующими знаками
инулевой ток для фазы В.
106
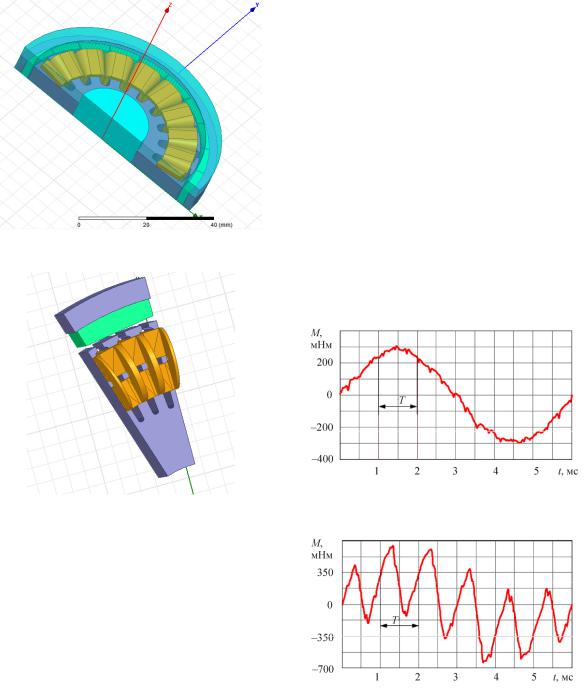
Модели, построенные с учетом осевой и радиальной симметрии машин, представлены на рис. 1.
а
б
Рис. 1. Трехмерные расчетные модели исследуемых двигателей: а – с дробным числом пазов на полюс и фазу; б – с целым числом пазов на полюс и фазу
В процессе эксперимента ротору сообщалась номинальная скорость, измерялся момент на валу двигателя, рассчитывалось среднее значение момента на отрезке, соответствующем межкоммутационному интервалу.
Для оценки электромагнитного момента каждого двигателя было произведено измерение реактивного момента, обусловленного неравномерностью воздушного зазора машины. В ходе экспе-
римента ротор приводился во вращение с номинальной скоростью, токи фаз принимались равными нулю. Электромагнитный момент двигателей рассчитывался по результатам проведенных экспериментов путем покоординатного вычитания кривой реактивного момента из кривой полного момента:
Мэм(t) = M (t) – Mp (t).
Результаты экспериментов. Полу-
ченные в ходе эксперимента осциллограммы суммарного момента представлены на рис. 2. Осциллограммы реактивного момента, снятые при повороте ротора, представлены на рис. 3.
На рис. 4 представлены кривые электромагнитного момента, полученные вышеописанным способом.
а
б
Рис. 2. Зависимость суммарного момента от времени при повороте ротора: а – для варианта 1; б – для варианта 2
107

а |
б |
Рис. 3. Зависимость реактивного момента от времени при повороте ротора: а – для варианта 1; б – для варианта 2
|
|
а |
|
|
|
б |
|
|
Рис. 4. Зависимость электромагнитного момента от времени при повороте ротора: |
||||||||
|
|
|
а – для варианта 1; б – для варианта 2 |
|
|
|||
|
Результаты расчетов моментов и коэффициентов |
Таблица 1 |
||||||
|
|
|||||||
|
|
|
|
|
|
|
|
|
Номер варианта |
M |
ср |
, Нм |
M эм, Нм |
k |
|
kэм |
M р , Нм |
|
|
|
ср |
п |
|
п |
m |
|
1 |
0,271 |
0,272 |
0,129 |
|
0,101 |
0,040 |
||
|
|
|
|
|
|
|
||
2 |
0,272 |
0,274 |
1,415 |
|
0,292 |
0,400 |
||
|
|
|
|
|
|
|
|
|
Средние за межкоммутационный интервал значения моментов для каждого двигателя рассчитывались по выражению
1 N
Mcp = T ∫0 M (t)dt,
где T – межкоммутационный интервал; M(t) – зависимость момента от времени. Для полного и электромагнитного моментов рассчитывался коэффициент пульсаций на межкоммутационном интервале [5]
k= (Мmax −Mmin ) / 2 ,
пMcp
где Mmax и Mmin – максимальное и минимальное значения момента на межкоммутационном интервале соответственно.
Реактивный момент оценивался по его наибольшей величине. Результаты расчетов сведены в табл. 1. В табл. 1 обозначено: Mср – средний момент на ва-
лу двигателя; Mсрэм – средний электро-
магнитный момент двигателя; kп – коэффициент пульсаций момента на валу
двигателя; kпэм – коэффициент пульсаций электромагнитного момента двигателя; Mmр – наибольшее значение реактивного момента двигателя.
108
Обсуждение результатов. Как по-
казал эксперимент, по величине электромагнитного момента оба двигателя приблизительно равнозначны, а в части уровня пульсаций момента вариант 1 безоговорочно выигрывает у варианта 2. Следует заметить, что пульсации момента присущи всем вентильным двигателям и связаны с дискретным характером изменения положения в пространстве вектора МДС якоря, однако в данном случае пульсации имеют недопустимо высокие значения.
Согласно полученным данным основными причинами высоких пульсаций является существенный реактивный момент двигателя с целым q и, в меньшей мере, моменты от взаимодействия высших гармоник полей якоря и индуктора.
Действительно, в создании реактивного момента в данном случае в равной степени участвуют все зубцы статора, расположенные на каждом полюсном делении одинаково относительно полюсов.
Вдвигателе с дробным q указанные факторы выражены слабее. При этом реактивный момент меньше, чем в варианте 2, из-за меньшего количества зубцов, являющихся причиной неравномерности воздушного зазора, и благодаря тому, что зубцы на разных полюсных делениях расположены несимметрично относительно полюсов.
Вмашине варианта 2 обмотка имеет полный шаг, распределение отсутствует. Вследствие указанных особенностей обмотки двигателя в кривой поля якоря кроме основной присутствуют и достаточно сильные неосновные гармоники, которые при взаимодействии с гармониками поля индуктора способны создавать пульсации электромагнитного момента [1].
Неосновные гармоники поля якоря в машинах с дробным q cущественно ос-
лаблены из-за смещения зубцов, принадлежащих одной фазе, друг относительно друга в пределах полюсного деления, что действует так же, как укорочение шага и распределение обмотки по пазам в обмотке с целым q [8].
Для подтверждения указанных фактов расчетные зависимости электромагнитных моментов от времени были разложены в гармонические ряды.
Электромагнитный момент двигателя с дробным числом пазов на полюс и фазу представлен основной гармоникой, которая имеет амплитуду 0,287 Нм. Амплитуды высших гармоник момента не превышают 1 % от амплитуды основной.
Кривая электромагнитного момента двигателя с целым q кроме основной гармоники (0,290 Нм) содержит ряд высших, сильнейшими из которых являются пятая (34 % от основной) и седьмая (9,85 % от основной). Следует отметить, что основные гармоники моментов двигателей обоих вариантов примерно одинаковы.
Снизить пульсации момента двигателя варианта 2 можно, ослабив высшие гармоники поля якоря и уменьшив реактивный момент. Уменьшение амплитуд высших гармоник поля якоря, которые в данном случае являются гармониками зубцового порядка, возможно лишь при увеличении числа пазов на полюс и фазу, что при заданных габаритах не представляется возможным без уменьшения числа полюсов машины. Другую возможность снижения моментов от зубцовых гармоник и реактивного момента дает увеличение воздушного зазора машины, что также связано с увеличением ее габаритов.
Эффективным способом уменьшения влияния зубцовых гармоник на электромагнитный момент машины является скос пазов статора [1]. Несмотря на то
109
что при этом амплитуды гармоник поля якоря не изменяются, происходит смещение этих гармоник вдоль оси машины относительно зубцовых гармоник поля индуктора, что ослабляет моменты, создаваемые одноименными гармониками якоря и индуктора. Введение скоса пазов благоприятно сказывается и на снижении реактивного момента.
Оценим влияние скоса пазов на суммарный и реактивный моменты двигателя варианта 2. Исследования проводились на той же модели при изменении скоса пазов от 0 до 1 зубцового деления. Большие значения скоса не рекомендованы практикой, поскольку это существенно увеличивает рассеяние [1]. Токовая нагрузка для определения суммарного момента также оставалась неизменной.
Наилучшие результаты были получены при скосе на одно зубцовое деле-
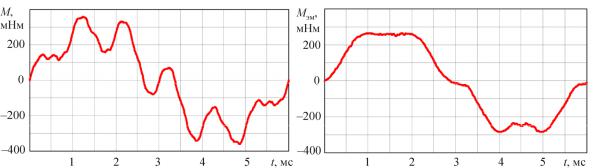
ние. При этом среднее на межкоммутационном интервале значение момента составило 0,279 Нм. Суммарный и электромагнитный моменты двигателя с целым q при скосе на одно зубцовое деление показаны на рис. 5. В табл. 2 приведены результаты расчета максимальных значений реактивного момента и амплитуд сильнейших гармоник электромагнитного момента.
В результате экспериментов установлено, что при скосе пазов на одно зубцовое деление реактивный момент существенно уменьшается, оставаясь при этом все-таки выше реактивного момента двигателя с дробным q. Весьма эффективно ослабляются и высшие гармоники электромагнитного момента двигателя. Отметим, что, несмотря на снижение пульсаций более чем на 50 %, их величина всё равно осталась высокой.
а |
б |
Рис. 5. Зависимость полного (а) и электромагнитного (б) моментов от времени при повороте ротора для варианта двигателя с целым числом пазов на полюс и фазу и скосом пазов на одно зубцовое деление
|
Результаты расчета |
|
Таблица 2 |
|
|
|
|
||
|
|
|
|
|
Пример |
Мэм1 , Нм |
Мэм5 , Нм |
Мэм7 , Нм |
Mp, Нм |
Без скоса |
0,290 |
0,098 |
0,029 |
0,400 |
|
|
|
|
|
Скос на одно зубцовое деление |
0,277 |
0,033 |
0,004 |
0,097 |
110