

2809.Автоматизация в электроэнергетике и электротехнике
..pdf(λ), реализован дискретный случайный процесс с постоянным периодом квантования и значениями дискрет, представляющими собой нормально распределенные случайные числа. Входные сигналы пропущены через высокочастотный фильтр в виде апериодического звена второго порядка, что позволило получить на входе системы сигналы, близкие по характеру зашумленным низкочастотным сигналам промышленных объектов.
По полученным в результате вычислительного эксперимента на модели (2) данным была обучена во временнóй области динамическая нейронная сеть.
Сеть имеет два внешних входа, на которые подаются значения входных сигналов объекта − контролируемого возмущения и управляющего воздействия. Сигнал управляющего воздействия формируется аналитической моделью регулятора, описывающей поведение регулятора имитационной системы управления. На вход сети подается также значение выходного сигнала объекта. Время квантовано с заданным периодом дискретности. Сигналы, подаваемые на вход сети, соответствуют определенным дискретным моментам времени. Структура нейросетевой модели системы приведена на рис. 3.
Рис. 3. Структура нейросетевой модели системы
Процесс обучения нейронной сети является итерационной процедурой, основанной на минимизации количества элементов структуры сети и объема обу-
чающей выборки при ограничении на значение показателя качества работы нейросетевой модели [13].
В сети установлены задержки на 4 такта, что обеспечивает влияние «исторических» данных с глубиной в 4 такта на значение выходной величины объекта. Сеть имеет 20 нейронов в скрытом слое. Нейрон выходного слоя выдает значения выходного сигнала. Сеть была обучена на выборке, полученной в эксперименте, состоящей из пар, включающих вектор значений внешних сигналов и выходной сигнал сети в соответствующие конфигурации сети дискретные моменты времени, начиная с текущего момента времени и далее в глубину «исторических данных».
Предполагая «зашумленность» каналов помехами, целесообразно предварительно оценить возможность аппроксимации рекуррентной нейронной сетью экспериментальных данных, представленных в виде временнËго ряда. Для этого по экспериментальным данным вычисляются взаимнокорреляционные функции по всем каналам передачи. Исследования на построенной нейронной сети следует проводить для тех каналов, взаимнокорреляционная функция которых указывает на наличие линейной связи.
На обученной нейронной сети проведен эксперимент по определению частотных характеристик каналов передачи «вход-выход» (см. рис. 2). Входной незашумленный синусоидальный сигнал реализован на частотах ω, равных 0,045, 0,05, 0,055, 0,06, 0,07, 0,08, 0,09, 0,1, 0,11, 0,12, 0,13, 0,14 и 0,15 1/ед. времени.
Модуль и фазовый сдвиг экспериментальной частотной характеристики в ν-й точке, соответствующей частоте ων, вычисляются по формулам
Aвых
M (ων ) = Aννвх ;
41
φ(ων ) = − ∆TTkν 2π,
kν
где Aνвых , Aνвх, Tkν и ∆ Tkν – взятые с графиков периодических процессов на входе и выходе сети для частоты ων значения соответственно амплитуд колебаний, периода колебаний и временнËго сдвига входного и первой гармонической составляющей выходного сигналов.
Действительной и мнимой частям экспериментальной комплексной частотной характеристики для частоты ων соответствуют выражения
Reэ(ων) = M(ων) cos(φ(ων)), Imэ(ων) = M(ων) sin(φ(ων)).
Для оценки параметров модели (2) по результатам эксперимента с нейронной сетью на всей области исследованных частот составлено выражение для аппроксимирующей комплексной частотной характеристики первого канала «вход-выход»:
|
|
|
|
|
Wysysλ ( jων ) = |
|
|
|
|||||
|
|
|
|
|
|
k1 |
− jω τ |
|
|
|
|||
|
|
|
|
|
T s +1 e |
ν 1 |
|
|
|
||||
= |
|
|
|
|
|
1 |
|
|
|
|
|
= |
|
|
|
|
|
|
|
|
|
|
|
|
|
||
1+ |
|
|
k2 |
|
|
|
e− jωντ2 kr + |
kr |
|
||||
T2 |
jων +1 |
|
|||||||||||
|
|
|
|
|
Ti jων |
||||||||
=Resysyλ (ων ) + jImsysyλ (ων ).
ивыражение функции ошибки, соответствующей задаче (1),
Φ(k1, τ1,T1, k2 , τ2 ,T2 ) = |
|
||
N |
|
2 |
|
(ων ) −Resysyλ (ων )) + (3) |
|||
= ∑(ResysE |
|||
ν=1 |
1 |
|
|
|
|
||
N
+ ∑(ImsysE (ων ) −Imsysyλ1 (ων ))2.
ν=1
Решение задачи (1) с функцией ошибки (3), доставляющее ей минимум, дает значения искомых оценок k1, τ1, T1, k2, τ2, T2. Решение получено методом сканирования. Найденные при решении
значения оценок параметров модели (2)
(k1 |
= |
1,1, T1 |
= 35, τ1 = 3; k2 = 0,6, |
T2 |
= |
41, τ2 = |
1) близки к значениям па- |
раметров исходной имитационной моде-
ли (k1 = 0,7, T1 = 20, τ1 = 4; k2 = 0,5, T2 = 50, τ2 = 1).
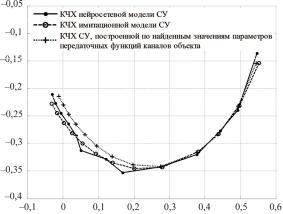
Годографы комплексных частотных характеристик экспериментальной (нейросетевой) модели системы управления, эталонной (имитационной) модели системы управления и модели системы управления, построенной по найденным значениям параметров передаточных функций каналов объекта, представлены на рис. 4.
Рис. 4. Комплексная частотная характеристика (КЧХ) для первого канала передачи, построенная непосредственно на имитационной модели системы управления, экспериментально по результатам опытов на нейросетевой модели системы управления и на основании найденных значений параметров передаточных функций каналов объекта
Заключение. Проведенные на имитационной системе управления исследования показали, что рассмотренный в статье метод позволяет параметрически идентифицировать объект, входящий в состав системы управления, передаточными функциями каналов «вход-выход». Это является, очевидно, в первую очередь следствием высокой аппроксимирующей способности примененной динамической рекуррентной нейронной се-
42
ти с обратной связью, а также коррект- |
пособие для вузов. – М.: Академкнига, |
||||||||||||
ности изложенной методики определе- |
2006. – 416 с. |
|
|
|
|||||||||
ния параметров передаточных функций |
7. Жданов А.И. Прямые рекуррент- |
||||||||||||
каналов объекта с системой управления |
ные алгоритмы решения линейных задач |
||||||||||||
по их экспериментальной частотной ха- |
метода наименьших квадратов // Журнал |
||||||||||||
рактеристике. |
|
|
|
|
|
|
вычислит. математики и матем. физи- |
||||||
Метод применÅм для идентифи- |
ки. – 1994. – Т. 34, № 6. – С. 805–814. |
||||||||||||
кации |
автоматизированных |
объектов |
8. Идрисов И.И. Алгоритмы адапта- |
||||||||||
управления, в том числе объектов энер- |
ции и |
обеспечения |
отказоустойчивости |
||||||||||
гетики, с непрерывным характером про- |
систем управления газотурбинными дви- |
||||||||||||
изводства по данным пассивных наблю- |
гателями на основе нейросетевых техно- |
||||||||||||
дений переменных объекта в режимах |
логий: автореф. дис. … канд. техн. наук. – |
||||||||||||
нормальной эксплуатации. |
Найденные |
Уфа, 2009. – 19 с. |
|
|
|
||||||||
передаточные функции каналов контро- |
9. Кафаров В.В., Дорохов И.Н. Сис- |
||||||||||||
лируемых возмущений используют при |
темный |
анализ процессов |
химической |
||||||||||
настройке алгоритмов |
их |
компенсации |
технологии. – М.: Наука, 1976. – 394 с. |
||||||||||
в автоматических системах управления. |
10. Шумихин А.Г., Бояршинова А.С. |
||||||||||||
|
|
|
|
|
|
|
|
Алгоритм выбора структурных парамет- |
|||||
|
Список литературы |
|
ров искусственной нейронной сети и |
||||||||||
|
|
|
|
|
|
|
|
объема обучающей выборки при аппрок- |
|||||
1. Аведьян |
Э.Д. |
Алгоритмы |
на- |
симации поведения динамического объ- |
|||||||||
стройки многослойных нейронных се- |
екта |
// |
Компьютерные |
исследования |
|||||||||
тей // |
Автоматика |
и |
телемеханика. – |
и моделирование. – 2015. – Т. 7, № 2. – |
|||||||||
1995. – № 4. – С. 106–118. |
|
|
|
С. 243–251. |
|
|
|
||||||
2. Автоматизация синтеза и обуче- |
11. Шумихин А.Г., Бояршинова А.С. |
||||||||||||
ние интеллектуальных систем управле- |
Идентификация |
сложного |
объекта |
||||||||||
ния / И.М. Макаров [и др.]; под ред. |
управления по частотным характеристи- |
||||||||||||
И.М. Макарова и В.М. Лохина. – М.: |
кам, полученным экспериментально на |
||||||||||||
Наука, 2009. – 228 с. |
|
|
|
|
|
его нейросетевой динамической моде- |
|||||||
3. Арановский |
С.В., |
Бардов |
В.М. |
ли // |
Автоматика |
и телемеханика. – |
|||||||
Метод оптимальной идентификации па- |
2015. – № 4. – С. 125–134. |
|
|
||||||||||
раметров линейного динамического объ- |
12. Шумихин А.Г., Бояршинова А.С., |
||||||||||||
екта в условиях возмущения // Проблемы |
Орехов М.С. Применение нейросетевых |
||||||||||||
управления. – 2012. – № 3. – С. 35–40. |
моделей |
при |
автоматизированном |
||||||||||
4. Бояринов А.И., Кафаров В.В. Ме- |
управлении сложными химико-техно- |
||||||||||||
тоды оптимизации в химической техно- |
логическими системами // Ползуновский |
||||||||||||
логии. – М.: Химия, 1975. – 564 с. |
|
вестник. – 2012. – № 3/2. – С. 9−12. |
|||||||||||
5. Габитов |
Р.Ф. Многомерное |
мо- |
13. Эйкхофф П. Основы идентифи- |
||||||||||
дельно-предикторное управление про- |
кации систем управления. Оценивание |
||||||||||||
калкой катализаторов крекинга, осно- |
параметров и состояния. – М.: Мир, |
||||||||||||
ванное на алгоритме с интервальной не- |
1975. – 680 с. |
|
|
|
|||||||||
определенностью: автореф. дис. … канд. |
|
|
|
|
|
|
|||||||
техн. наук. – Уфа, 2012. – 19 с. |
|
|
|
|
|
|
|
||||||
6. Гартман Т.Н., Клушин Д.В. Осно- |
|
|
|
|
|
|
|||||||
вы компьютерного моделирования хи- |
|
|
|
|
|
|
|||||||
мико-технологических |
процессов: учеб. |
|
|
|
|
|
|
||||||
43
УДК 65-523.2
ЭФФЕКТ ВНЕДРЕНИЯ ЧАСТОТНОГО ПРИВОДА В УПРАВЛЕНИИ ПОДАЧЕЙ ЖИДКИХ СРЕД НАСОСНЫМ ОБОРУДОВАНИЕМ
А.Г. Шумихин, И.А. Вялых, С.А. Власов
Пермский национальный исследовательский политехнический университет
Предложена методика оценки экономического эффекта и срока окупаемости частотного привода центробежных насосов жидких сред. Определяются характеристик Q–h насоса, Q–h сети, Q–N насоса по экспериментальным данным или из справочной литературы и рассчитывается экономия в зависимости от схемы измерений.
Ключевые слова: частотный привод, жидкие среды, система управления, центробежные насосы.
EFFECT OF IMPLEMENTATION IN MANAGEMENT FREQUENCY DRIVE SUPPLYING THE LIQUID MEDIUM PUMPING EQUIPMENT
A.G. Shumikhin, I.A. Vyalyh, S.A. Vlasov
Perm National Research Polytechnic University
The method of evaluation of the economic impact and the payback period frequency drive centrifugal pumps for liquid media. Defines the characteristics of the pump Q-h, Q-h network, Q-N pump from experimental data or from the literature and calculated savings depends on the measuring circuit.
Keywords: frequency drive, liquid media, control system, centrifugal pumps.
Внастоящее время в насосных агрегатах нефтеперерабатывающей промышленности применяются в основном нерегулируемые асинхронные электроприводы, и режим их работы не связан с фактическим потреблением (расходом) перекачиваемых жидкостей для тех или иных нужд. Как правило, расход жидких сред при этом регулируется дроссельной трубопроводной арматурой вручную или системами автоматического регулирования технологических параметров. Насосы по производительности и создаваемому напору обычно выбирают с большим запасом, что приводит к большим потерям давления при дросселировании регулирующими органами и, следовательно, к перерасходу электроэнергии на привод насосов.
Вработе рассматривается оценка экономической целесообразности внедрения частотно-регулируемого привода насосного оборудования на предприяти-
ях нефтеперерабатывающей, химической и других отраслей промышленности.
Согласно паспорту на насос Д500-65 применение частотного преобразователя позволяет осуществить:
–ПИД-регулирование технологиче-
ского параметра (расход жидкости, давление, температура и др.) в зависимости от скорости вращения двигателя;
–плавный пуск – пуск и торможение осуществляются плавно, чтобы уменьшить пусковой ток;
–меньшая частота вращения дви-
гателя – увеличение срока работы подшипников;
–подключение на ходу – возможно подключение преобразователя к еще вращающемуся двигателю, например при скачке питающего напряжения;
–генераторное торможение – дви-
гатель работает в генераторном режиме, отдавая энергию в резистор звена постоянного тока преобразователя частоты;
44
–запрещенные частоты – для ряда частот возможен резонанс, поэтому их установка не допускается;
–конфигурируемые цифровые вхо-
ды-выходы – многочисленные возможности управления.
Задача оценки эффективности применения насосного оборудования с час- тотно-регулируемым приводом предполагает определение экономии потребляемой из сети электроэнергии асинхронным двигателем и срока окупаемости самого частотного преобразователя. Выбор алгоритма расчета экономии определяется следующим:
1. Построение характеристик Q–h насоса, Q–h сети, Q–N насоса осуществляется по опытным данным (на действующей установке) или на основании справочной литературы (на стадии проектирования):
1.1. Построение характеристики Q–h сети без дросселирующей арматуры (без РО).
1.2. Построение характеристики Q–h сети с РО.
1.3. Определение потребляемой мощности нерегулируемым асинхронным двигателем.
1.4. Расчет потребляемой мощности асинхронным двигателем с частотнорегулируемым преобразователем на основе законов кинематического подобия.
2. Расчет экономии по опытным данным, в свою очередь, зависит от схемы измерений (наличие в схеме мано-
метра Рвс (рис. 1)).
Рассмотрим подробнее порядок расчета.
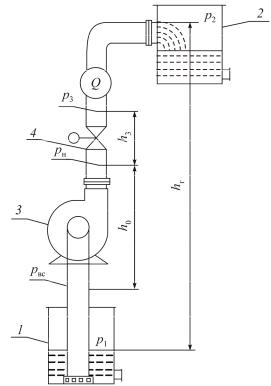
Построение характеристик Q–h насоса, Q–h сети, Q–N насоса. Типовая схема включения центробежного насосного оборудования для перекачивания жидкости приведена на рис. 1, в качестве напорной емкости могут служить любые аппараты технологических процессов и
производств (теплообменные, колонные и др.). Здесь рн – давление в нагнетательном трубопроводе на выходе жидкости из насоса, Па; рвс – давление во всасывающем трубопроводе на входе жидкости в насос, Па; р2 и р1 – давления в пространстве нагнетания и в пространстве всасывания, Па; h0, h3 – вертикальное расстояние между точками измерения давлений рн и рвс, рн и р3, соответственно; Q – расход жидкости, м3/с.
Рис. 1. Схема подачи жидкости: 1 – приемная емкость; 2 – напорная емкость; 3 – насос; 4 – дроссельный РО
Полный напор, развиваемый насосом 3 (см. рис. 1), определяется уравнением, получаемым из уравнения Бернулли:
z + |
p |
+α |
ω2 |
= z |
|
+ |
p |
+α |
|
ω2 |
+ h , |
|
1 |
1 |
|
2 |
|
2 |
(1) |
||||||
ρg |
|
|
ρg |
2 2g |
||||||||
1 |
1 2g |
|
2 |
|
|
п |
|
|||||
где z – геометрический (высотный напор); p/(ρg) – пьезометрический (скоростной) напор; ω2/(2g) – скоростной (динамический) напор; hп – напор, потерян-
45
ный на преодоление сопротивлений; α – коэффициент Кориолиса.
Потеря мощности на РО составля-
ет [4]
N |
п |
= ρgQh = ρgQ |
|
pн − p3 |
= |
|
|
|
|
||||
|
п |
ρg |
(2) |
|||
|
|
|
|
|||
|
= Q ( pн − p3 ) = Q∆pРО, |
|
||||
где Nп – потеря полезной мощности; Q – |
||||||
подача насоса (расход жидкости); |
ρ – |
|||||
плотность |
жидкости; g |
– ускорение |
||||
свободного падения; ∆pРО – потеря давления на РО.
Построение характеристики сети без дросселирующей трубопровод-
ной арматуры. Характеристика насоса, представленная в паспорте (на насос) или в справочнике, обычно дана для воды. Между тем насос можно использовать для перекачивания и других жидкостей, физические свойства которых могут значительно отличаться от свойств воды. Характеристику Q–h насоса можно получить опытным путем или из справочной литературы.
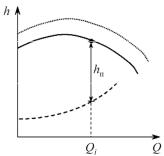
Рассмотрим расчет полного напора, развиваемого насосом, на основе данных, полученных опытным путем. Эксперимент проводится по схеме, представленной на рис. 1. Во время опыта снимаются показания манометров и расхода при изменении степени открытия РО. Желательно снять значения при полностью открытом РО и в ряде промежуточных точек, на основании этого строится характеристика Q–h (рис. 2).
Если отсутствует манометр рвс, то характеристика Q–h берется из паспорта на насос, пересчитывается на вязкость жидкости и номинальную частоту вращения асинхронного двигателя по формуле [1]
Q = Q |
n2 |
, |
(3) |
|
|||
1 n |
|
|
|
1 |
|
|
|
где n1, n2 – частота вращения насоса (по паспорту) и двигателя соответственно; Q1 – подача насоса по паспорту.
Рис. 2. К определению характеристики сети
без РО: …. – характеристика насоса по поспорту (при частоте оборотов n1 (n1 > n2), перекачиваемая среда – вода; ––– –
характеристика насоса при частоте двигателя n2 и данной вязкости жидкости; – – – характеристика сети без РО
Пересчет напора на частоту вращения двигателя производится по следующей формуле [1]:
h = h1 |
|
2 |
|
|
n2 |
|
, |
(4) |
|
|
n1 |
|
|
|
где h1 – напор насоса по паспорту. Вычитая из соответствующих зна-
чений напора полученной характеристики насоса потерю напора hп на РО, определяемую по формулам (3) или (4), строим характеристику Q–h сети без РО
(см. рис. 2).
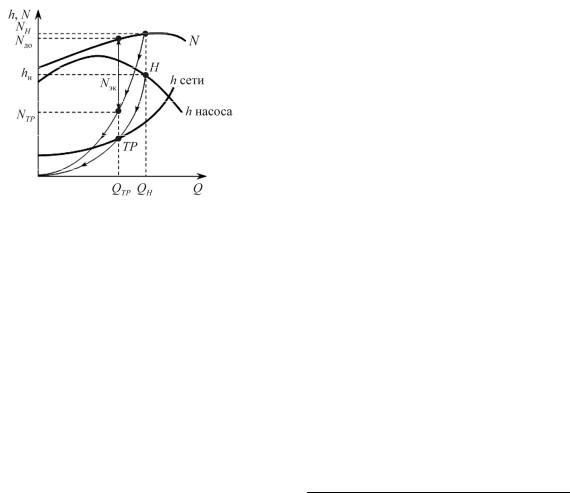
Построение характеристики сети с дросселирующей трубопроводной арматурой. Точка пересечения характеристики насоса с характеристикой сети называется рабочей точкой, она отвечает наибольшей производительности насоса при его работе на данную сеть [3]. Если требуется более высокая производительность, то необходимо либо увеличить число оборотов двигателя, либо заменить данный насос на насос большей производительности. Увеличение может быть достигнуто также путем уменьшения гидравлического сопротивления сети.
46
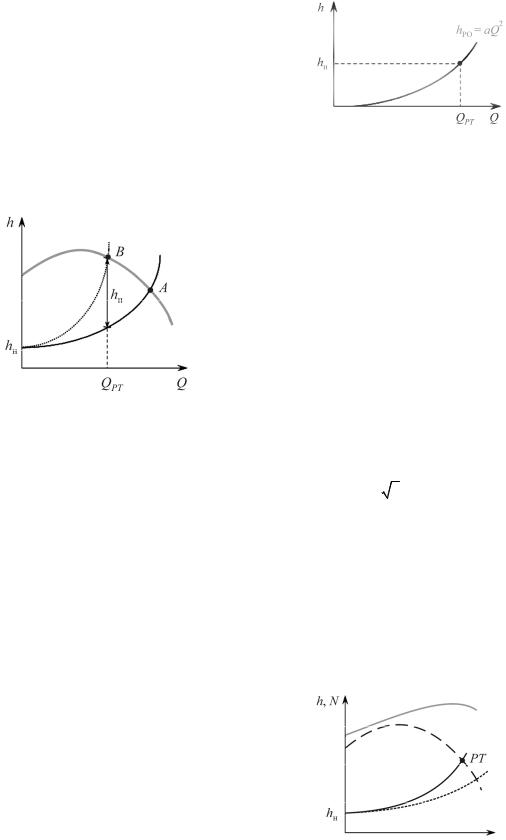
При использовании дросселирующей трубопроводной арматуры (РО) рабочая точка (рис. 3) переместится из точки А (пересечение характеристик насоса и сети без РО) в точку B (пересечение характеристик насоса и сети с РО). Потеря напора, обусловленная потерей на местное сопротивление, при подаче (производительности) насоса QРТ обозначена на рисунке как hп.
Рис. 3. К расчету потери напора на РО: …. – характеристика сети с РО; –– – характеристика сети без РО; –– – характеристика насоса
По полученным экспериментальным данным можно получить характеристику насоса Q–h и с ее помощью построить характеристику Q–h сети без РО.
При построении характеристики Q–h сети с РО известны только (см. рис. 3) две точки hн (работа на закрытую задвижку: напор совпадает с напором hн характеристики сети без РО) и В (рабочая точка системы с РО). Для восстановления характеристику Q–h сети с РО во всем диапазоне работы насоса Q [0; QРТ] можно использовать зависимость вида y = ax2, где a в уравнении зависит от геометрической формы местного сопротивления (РО) и не зависит от режима течения жидкости (рис. 4), проходящую через точку (0; 0) и точку (QРТ; hп(QРТ)). Коэффициент a можно определить из уравнения
a = |
hп (QРТ ) |
. |
(5) |
|
Рис. 4. График потери напора на РО
Построение характеристики «подача насоса – потребляемая мощность асинхронным двигателем». Для того чтобы построить характеристику Q–N (подача насоса – потребляемая мощность асинхронным двигателем), измеряют несколько значений расхода жидкости Q (см. рис. 3), одновременно замеряя потребляемую мощность N электродвигателем из сети. Для наиболее точного построения характеристики Q–N необходимо снять показания при полностью открытом, полностью закрытом РО и в нескольких промежуточных точках.
Потребляемая из сети мощность [2]
N = 3 I U cos ϕ. |
(6) |
Определение экономии мощности и расчет экономического эффекта при применении насосов с частотно-регули-
руемым приводом. Совмещаем характеристики Q–h насоса, сети с РО или без РО (в зависимости от того, будет ли полностью открыт РО в технологической схеме регулирования расхода жидкости с помощью ЧП), Q–N на одном графике (рис. 5).
Рис. 5. Характеристика насоса и сети: - - - – характеристика сети Q–h без РО; –– –
характеристика сети Q–h с РО; –– –– – характеристика Q–h насоса; –– – характеристика Q–N
47
Теория подобия лопастных насосов устанавливает следующие зависимости кинематического подобия (если рассматривают зависимости характеристик одного насоса от частоты вращения ва-
ла) [1]:
|
|
|
|
H1 |
|
2 |
N1 |
|
3 |
ρ1 |
|
|||
Q1 |
= |
n1 |
, |
= |
n1 |
|
, |
= |
n1 |
|
. |
|||
|
|
|
|
|
||||||||||
Q2 |
|
n2 |
H2 |
n2 |
|
N2 |
n2 |
ρ2 |
||||||
Допустим, что необходимо определить экономию мощности при требуемом расходе жидкости QТР (рис. 6).
Рис. 6. К расчету экономии мощности
При использовании нерегулируемого асинхронного двигателя потребляемая мощность соответствует на графике точке Nдо. Для расчета экономии мощности необходимо найти на кривой Q–h насоса такую точку Н, которая при изменении частоты вращения двигателя с n1 (номинальная частота вращения двигателя, которой соответствуют характеристики насоса Q–h, Q–N) до n2 пересечет кривую Q–h сети в точке ТР. Подача насоса для точки Н будет составлять QН, а потребляемая из сети мощность NН. Мощность NН необходимо пересчитать с учетом требуемого расхода QТР (или, что тоже самое, на число оборотов двигателя n2). Получим мощность NТР, потребляемую асинхронным электродвигателем при использовании частотного преобразователя. С учетом КПД частотного преобразователя получим
48
Nпосле = |
NТР |
|
|
. |
|
КПДчаст.преобразователя |
||
Без использования ЧП потребляемая мощность была бы Nдо. Следовательно, экономия мощности при требуемом расходе жидкости Qтр
Nэк = Nдо − Nпосле.
Методика расчета экономического эффекта от внедрения частотнорегулируемого привода. Экономия электроэнергии за время T при применении частотного преобразователя рассчитывается по формуле
T
Экономия эл. энергии = ∫ Nэкdt.
0
Экономия электроэнергии в точке (заданного расхода жидкости) при применении частотного преобразователя будет
Экономия эл. энергии =
= (Nдо − Nпосле ) 100 %, Nдо
где Nдо – потребляемая электродвигателем мощность при нерегулируемом приводе; Nпосле – потребляемая электродвигателем мощность при использовании частотного привода.
Срок окупаемости частотного привода (лет) при 24-часовой работе весь год при заданном расходе вычисляется по формуле
Срок = = Стоимость ЧП
(Nдо − Nпосле ) 24 365 Стоимостьед. эл. энергии,
где Стоимость ЧП – стоимость частотного преобразователя, у.е.; Стоимость ед. эл. энергии – стоимость 1 кВт ч электроэнергии, у.е.
Следует подчеркнуть некорректность оценок по мощности в точке (в одном режиме) для процессов, изменяю-
щихся во времени (например, расход жидкости может меняться в разное время суток в несколько раз).
Полную оценку фактической энергетической эффективности любой системы можно сделать только путем сравнения потребления энергии за некоторый период. В качестве времени для оценки при циклических процессах удобно брать время цикла (например, сутки).
Недостатком частотного привода насосов является нестабильная работа на малых расходах, что делает возможным использование частотного привода при значениях расхода от середины напорной характеристики. При меньших значениях расходов целесообразно использовать регулирование за счет управляющего клапана.
Пример применения методики.
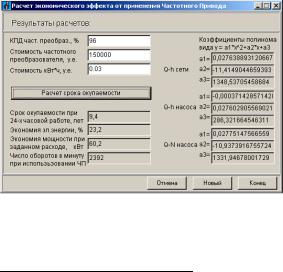
Насос марки НКВ-360/220; Q = 315 м3/ч; Н = 25,8 кг/см2, частота вращения установки вакуумной перегонки мазута 2950 об/мин, перекачиваемая среда – мазут, температура 180–210 °С (плотность 950 кг/м3)1. Результаты расчета для насоса НКВ-360/220 приведены на рис. 7.
Эксперимент проводился одновременным открытием регулирующих клапанов. Асинхронный двигатель – тип ВА 02-450 (высоковольтный) 3000 об/мин, N = 315 кВт, U = 6000 В. Измерение потребляемого тока проводилось по показаниям амперметра Э8030, 150×5, Кл.2.5, установленного на щите питания двигателя.
В результате обследования по настоящей методике выяснилось, что при применении ЧРП будет достигнута экономия электроэнергии ≈23 %, однако срок окупаемости ЧРП составит десять лет (связано с высокой стоимостью высоковольтного частотного преобразователя).
Список литературы
1.Насосы и компрессоры / С.А. Абдурашидов [и др.]. – М.: Недра, 1974. – 296 с.
2.Касаткин А.Г. Основные процессы и аппараты химической технологии. –
М.: Химия, 1971. – 784 с.
3.Электротехника / А.С. Касаткин
[и др.]. – М.: Высш. шк., 1999. – 542 с.
4.Павлов К.Ф. Примеры и задачи по курсу процессов и аппаратов химической технологии. – Л.: Химия, 1987. – 576 с.
Рис. 7. Результаты расчета для насоса НКВ-360/220
1 Руководства пользователя частотными преобразователями фирмы Siemens: MICRO/ MIDIMASTER (Basic, Vector, Eco, Integrated), COMBIMASTER.
49
УДК 621.311.238:681.513.66
РЕЗУЛЬТАТЫ ИССЛЕДОВАНИЯ СИСТЕМЫ УПРАВЛЕНИЯ С ЭТАЛОННОЙ МОДЕЛЬЮ ДЛЯ ЭЛЕКТРОЭНЕРГЕТИЧЕСКОЙ ГАЗОТУРБИННОЙ УСТАНОВКИ
И.Р. Зиятдинов, Б.В. Кавалеров
Пермский национальный исследовательский политехнический университет
Статья продолжает исследование возможности построения систем автоматического управления электроэнергетическими газотурбинными установками с использованием эталонной модели и сигнальной настройкой. Обсуждаются результаты двух компьютерных экспериментов: допустимая кратность изменения переменных, ограниченная критериями качества и устойчивости, и адаптивная система регулирования с ограничением по расходу топлива. Производится сравнительный анализ системы, когда в алгоритме сигнальной адаптации используются один или несколько сигналов.
Ключевые слова: эталонная модель, система автоматического управления, газотурбинная установка, моделирование.
THE RESULT ELECTRIC ENERGY GAS TURBINE POWER
WITH A REFERENCE MODEL SETTING IS INVESTIGATION
CONTROL SYSTEM
I.R. Ziyatdinov, B.V. Kavalerov
Perm National Research Polytechnic University
The possibility electric energy power gas turbine automatic control constructing systems is article investigates. The signal settings is application, because it has one indisputable advantage – the highest rate of adaptive processes, in contrast to the algorithms of parametric settings. Furthermore, nonlinear properties manifested in this model GTU primarily. It is expedient to choose the method of Lyapunov functions for reasons of reducing the search time of extreme as a method of adaptation. It is apply simplified models of gas turbines for the synthesis of control algorithms and testing of ACS GTU, which are obtained by identification.
Keywords: reference model, automatic control system, power gas turbine, modeling.
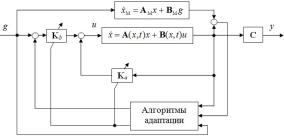
Введение. Рассмотрим возможности использования адаптивного управления ГТУ с эталонной моделью и сигнальной настройкой (СН) для улучшения управления электроэнергетическими ГТУ (рис. 1). В качестве базы для построения таких систем возьмем методологический
Рис. 1. Структурная схема системы с параметрической и сигнальной настройкой
аппарат из работы [3], где с системных позиций рассматривается научно-техни- ческая проблема создания адаптивных алгоритмов управления для нелинейных электромеханических объектов с нелинейными свойствами.
Допустимая кратность изменения переменных. Вектор состояния предста-
вим в виде |
x = (x1, x2, x3, x4)т, где |
x1 = nс.т , x2 = |
nтк, x3 – выход интеграто- |
ра регулятора дозатора газа; x4 – выход интегратора регулятора nс.т.
Тогда сигнальный алгоритм получим в следующем виде:
z(t) = −hsgn (BтРе) =
= −hsgn (242,157е1 +55,5178е2 +
50