

2809.Автоматизация в электроэнергетике и электротехнике
..pdfкачества в процессах приготовления многокомпонентных смесей на основе оптолептической информации об их поверхности // Актуальные проблемы науки и техники – 2014: материалы VII Междунар. науч.-практ. конф. молодых ученых. – Уфа: Ред.-изд. центр УГНТУ, 2014. – С. 200–201.
2. Способ и алгоритмы оперативного контроля и управления качеством в процессах приготовления многокомпонентных смесей / А.Г. Шумихин,
П.Ю. Сокольчик, С.И. Сташков, Л.Е. Поповцева // Актуальные проблемы электронного приборостроения. АПЭП – 2014: Тр. XII Междунар. конф. – Новосибирск:
Изд-во НГТУ, 2014. – С. 150–156.
3. Способ определения степени гомогенизации гетерогенных смесей по оптолептической информации об их поверхности: пат. 2489705 Рос. Федерация / Шумихин А.Г., Сокольчик П.Ю.,
Сташков С.И. – Опубл. 10.08.2013.
71
УДК 621.438: 004.032.26
ПОЛУЧЕНИЕ НЕЛИНЕЙНОЙ МОДЕЛИ ГТУ НА ОСНОВЕ НЕЙРОННОЙ СЕТИ
Г.А. Килин, И.В. Бахирев, Б.В. Кавалеров
Пермский национальный исследовательский политехнический университет
Описывается использование нейронных сетей в задачах идентификации и получения моделей газотурбинных установок.
Ключевые слова: нейронная сеть, модель, идентификация, функция активации, алгоритм обучения, газотурбинная установка.
NONLINEAR GTU MODEL RECEIVING BY NEURAL NETWORK
G.A. Kilin, I.V. Bahirev, B.V. Kavalerov
Perm National Research Polytechnic University
Neural network using in tasks of gas-turbine units identification and model receiving describe in this article.
Keywords: neural network, model, identification, activation function, learning algorithm, gas-turbine unit.
Введение. Использование нейронных сетей необходимо для получения быстрорешаемых многорежимных нелинейных математических моделей электроэнергетических систем.
Недостатки модели на основе уравнений регрессии. Подход, исполь-
зованный ранее [2, 3, 4], имел существенный недостаток, который заключался в том, что структуру математической модели необходимо подбирать вручную. Были предприняты попытки по автоматизации процесса подбора структуры математической модели [5], но в итоге они могли применяться только в определенных, строго заданных условиях. Если при работе с ГТУ и различными ее вариациями (микротурбина, газоперекачивающий агрегат) генетический алгоритм показывал приемлемые результаты для заданных режимов [5], то в случае с многорежимной системой добиться положительных результатов так и не удалось. В первую очередь это обусловлено тем, что генетический алгоритм не ищет оптимальную многорежимную структуру модели ГТУ, а подбирает такую
структуру, которая показывает наилучшие результаты для данного режима, при использовании нелинейных элементов количество комбинаций возрастает многократно [1].
Модель на основе нейронной сети.
Нейросетевая модель лишена данного существенного недостатка, так как в ходе обучения она самостоятельно определяет зависимость параметров друг от друга. Необходимо учитывать, что с нейросетевой моделью также связаны некоторые сложности, которые заключаются в выборе:
1)критерия первоначальной обработки данных;
2)функции активации;
3)коэффициента скорости обучения;
4)алгоритма обучения.
Советуют использовать в качестве функции активации гиперболический тангенс, график которого представлен на рис. 1. Экспериментальные данные обрабатываются следующим образом: в первую очередь определяется средняя величина на основе всего массива экспериментальных данных, затем эта вели-
72

чина вычитается из каждого значения экспериментальных данных, после полученные данные делятся на максимальное число (по модулю) из данной выборки. В ходе всех этих операций обучающий массив принадлежит диапазону от –1 до 1.
Рис. 1. График функции гиперболического тангенса
Был выбран алгоритм обратного распространения ошибки, так как он является самым простым в понимании и реализации. С выбором коэффициента обучения задача обстоит сложнее, так как в случае слишком малой его величины обучение происходит долго, в случае большего значения можно не добиться приемлемой точности. Именно поэтому
коэффициент обучения необходимо подбирать вручную для каждого эксперимента.
Результаты работы нейросетевой модели. Хотя с помощью нейронной сети можно получать несколько выходов, изначально для отработки методов были предприняты попытки с одним единственным выходом для каждой переменной. В случае с ГТУ это скорость вращения турбокомпрессора и скорость вращения свободной турбины. Поэтому существует 2 модели для каждой переменной. Данный подход имеет свои недостатки: во-первых, возрастает количество моделей, во-вторых, так как каждая модель обладает определенным приближением, при их объединении результат может выходить за рамки принятой нами меры адекватности. На рис. 2 и 3 представлены результаты работы объединенной модели (совместная работа нейронной модели по скорости вращения турбокомпрессора и модели по скорости вращения свободной турбины) при изменении мощности нагрузки 5750 – 5850 – 6000 – 6250 кВт. Ниже представлена мера адекватности объединенной модели по критерию Тейла [6].
Рис. 2. График изменения скорости вращения турбокомпрессора: 1 – модельная; 2 – экспериментальная
73
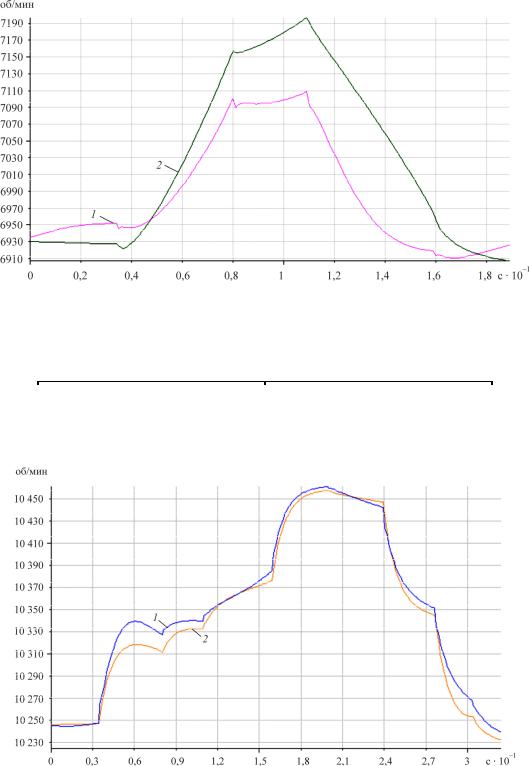
Рис. 3. График изменения скорости вращения свободной турбины: 1 – модельная; 2 – экспериментальная
Мера адекватности объединенной модели по критерию Тейла
Мера адекватности скорости |
Мера адекватности скорости |
вращения турбокомпрессора |
вращения свободной турбины |
|
|
0,00150605 |
0,009152819 |
|
|
Рис. 4. График изменения скорости вращения турбокомпрессора: 1 – модельная; 2 – экспериментальная
В дальнейшем на основе полученных |
сетевой модели с 2 выходами при изме- |
данных нейросетевая модель была улуч- |
нении мощности нагрузки 5750 – 5850 – |
шена: она одновременно может работать |
6000 – 6250 – 6200 – 6000 – 5900 – |
с несколькими выходами. На рис. 4 и 5 |
5750 кВт. Ниже представлена мера адек- |
представлены модельные данные нейро- |
ватности по критерию Тейла [6]. |
74 |
|

Рис. 5. График изменения скорости вращения свободной турбины: 1 – модельная; 2 – экспериментальная
Мера адекватности модели по критерию Тейла
Мера адекватности скорости |
Мера адекватности скорости |
вращения турбокомпрессора |
вращения свободной турбины |
9,44 · 104 |
0,006264 |
Рис. 6. График изменения скорости вращения турбокомпрессора совместно
сработой САУ: 1 – модельная; 2 – экспериментальная
Вдальнейшем полученная нейросе6250 кВт, то и ее тестирование также
тевая модель была протестирована со- |
проводилось с нагрузками, принадлежа- |
вместно с системой управления (рис. 6 |
щими этому диапазону (6000 – 5800 – |
и 7). Поскольку эксперименты, на основе |
6200 – 5800 кВт). Ниже представле- |
которых была получена данная модель, |
на мера адекватности по критерию |
проводились в диапазоне от 5750 до |
Тейла [6]. |
|
75 |
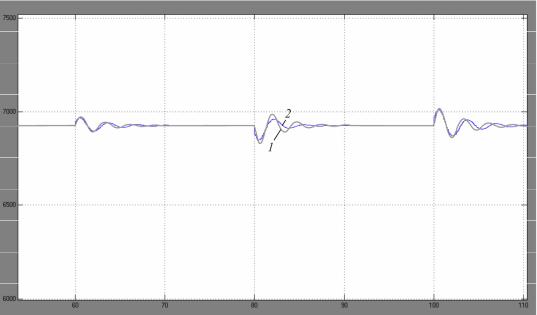
Рис. 7. График изменения скорости вращения свободной турбины совместно с работой САУ: 1 – модельная; 2 – экспериментальная
Мера адекватности модели с САУ по критерию Тейла
Мера адекватности скорости |
Мера адекватности скорости |
вращения турбокомпрессора |
вращения свободной турбины |
0,0014862 |
0,001227 |
|
|
Как видно из представленных дан- |
тодологических |
основ |
адаптивного |
|||
ных, нейростетевая модель замечательно |
управления автономными и неавтоном- |
|||||
справляется с |
задачей |
моделирования |
ными газотурбинными |
электростан- |
||
нелинейных процессов на примере ГТУ, |
циями мощностью до 25 МВт». |
|||||
также необходимо отметить, что полу- |
Список литературы |
|||||
ченная модель является многорежимной |
||||||
и нелинейной. |
|
|
|
|
|
|
Вывод. Уникальной |
особенностью |
1. Бахирев И.В., Килин Г.А., Кава- |
||||
нейронных сетей является тот факт, что |
леров Б.В. Алгоритм поиска нелинейной |
|||||
в некотором роде |
они |
универсальны, |
модели ГТУ для привода ГПА // Вестник |
|||
и алгоритмы, которые использовались |
Иж. гос. техн. ун-та им. М.Т. Калашни- |
|||||
для получения |
нейросетевой модели |
кова. – 2014. – № 2(62). |
|
|||
ГТУ, также подходят для получения мо- |
2. Алгоритм |
построения быстроре- |
||||
дели ГПА, микротурбины, объединенной |
шаемой модели газотурбинной газопере- |
|||||
системы ГТУ–СГ. |
|
|
качивающей установки по эксперимен- |
|||
Опубликованные в статье резуль- |
тальным данным / И.В. Бахирев, Г.А. Ки- |
|||||
лин, А.Ю. Поварницын, Б.В. Кавалеров, |
||||||
таты получены в рамках выполнения го- |
К.А. Один // Вестник Иж. гос. техн. |
|||||
сударственного |
задания |
Минобрнауки |
ун-та им. М.Т. Калашникова. – 2013. – |
|||
РФ № 13.832.2014/K |
«Разработка ме- |
№ 3(59). |
|
|
||
76 |
|
|
|
|
|
|
3. Кавалеров Б.В., |
Килин |
Г.А., |
тета. Электротехника, информационные |
||
Один К.А. |
Всережимная |
быстрорешае- |
технологии, системы управления. – |
||
мая модель газотурбинной газоперека- |
2013. – № 8. |
||||
чивающей установки // Известия Юго- |
5. Килин Г.А., Один К.А., Кава- |
||||
Зап. гос. ун-та. Сер.: Техника и техноло- |
леров Б.В. Структурно-параметрическая |
||||
гия. – 2013. – № 2. |
|
|
|
идентификация модели газотурбинной |
|
4. Килин Г.А., Кавалеров |
Б.В., |
установки на основе генетического алго- |
|||
Один К.А. Выбор математических моде- |
ритма // Фундаментальные исследова- |
||||
лей для газотурбинных установок раз- |
ния. – 2014. – № 11–7. – С. 1480–1484. |
||||
личных версий применения // Вестник |
6. Тейл Г., Ершов Э.Б. Прикладное |
||||
Пермского |
национального |
исследова- |
экономическое прогнозирование – М.: |
||
тельского |
политехнического |
универси- |
Прогресс, 1970. – 502 с. |
||
77

Секция 2 ЭЛЕКТРОМЕХАНИЧЕСКИЕ СИСТЕМЫ
УДК 621-133.33
МАТЕМАТИЧЕСКАЯ МОДЕЛЬ ВИБРАЦИОННОГО СЕПАРАТОРА С ЛИНЕЙНЫМ АСИНХРОННЫМ ЭЛЕКТРОПРИВОДОМ
Р.С. Аипов1, С.В. Акчурин1, В.В. Пугачев2
1Башкирский государственный аграрный университет, Уфа
2Оренбургский государственный аграрный университет
Предлагается математическая модель вибрационного сепаратора на базе линейного асинхронного электропривода, которая составлена на основе расчетной схемы с применением кусочно-постоянных функций и также реализована в приложении Simulink (MatLab). Приведенные временные характеристики подтверждают работоспособность математической модели.
Ключевые слова: математическая модель, вибропривод, линейный двигатель, технологическая машина, кусочно-постоянные функции.
MATHEMATICAL MODEL OF A VIBRATORY SEPARATOR
WITH LINEAR INDUCTION ELECTRIC DRIVE
R.S. Aipov1, S.V. Akchurin1, V.V. Pugachev2
1Bashkir State Agrarian University, Ufa
2Orenburg State Agrarian University
A mathematical model of the vibratory separator based on the linear induction motor is proposed in the article. The mathematical model compiled on the basis of settlement scheme with application of piecewise constant functions, and also realized in application Simulink (MatLab). The provided temporary characteristics confirm operability of mathematical model.
Keywords: mathematical model, vibrodrive, linear motor, technological machine, constant functions.
В сельском хозяйстве, пищевой про- |
На рис. 1 приведена кинематическая |
||
мышленности для сепарирования сыпу- |
схема вибрационного сепаратора слож- |
||
чих материалов широко применяются виб- |
ного колебательного движения деки, |
||
рационные |
сепараторы. Эффективность |
подвешенного на упругих элементах. |
|
сепарирования вибрационными сепарато- |
Вибрационный сепаратор состоит из |
||
рами достигается приданием |
рабочему |
деки 1, подвешенной на упругих подвес- |
|
органу (деке) машины сложного регули- |
ках попарно 2 и 3. Статор ЛАД выпол- |
||
руемого колебательного движения [3]. |
нен из двух равных частей 4 и 5, распо- |
||
Целью |
научной работы |
является |
ложенных с разных сторон деки 1 парал- |
разработка эффективного вибрационного |
лельно друг другу. Обмотка части |
||
сепаратора на базе привода с линейным |
статора 5 является продолжением об- |
||
асинхронным двигателем (ЛАД). |
мотки части ЛАД 4. Части статора рас- |
||
Одной из задач научной работы яв- |
положены на вторичных элементах (ВЭ) |
||
ляется разработка математического ап- |
соответственно 6 и 7 (рис. 1, б) и могут |
||
парата для расчета и исследования рабо- |
перемещаться на ВЭ относительно деки. |
||
ты технологической машины. |
|
В свою очередь, концы ВЭ закреплены |
|
78
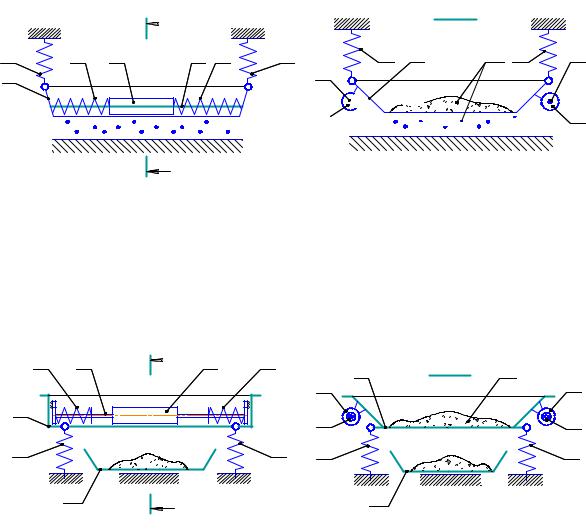
к деке 1. На каждом ВЭ со стороны статора установлены попарно упругие элементы привода 8 и 9. Под декой 1 может быть установлена приемная емкость для сбора сепарируемого материала 10.
На рис. 2 приведена аналогичная конструкция вибрационного сепаратора сложного колебательного движения деки, установленного на упругих элементах.
Частота включений блока управления ЛАД, а также длительность его включения определяются применительно к сепарируемому материалу необхо-
димой частотой и амплитудой колебаний деки. В приводах с ЛАД и упругими накопителями механической энергии в режиме вынужденных колебаний при изменении длительности включений ЛАД изменяется амплитуда, а при изменении частоты – частота колебаний рабочего органа [1].
Приводы в приведенных схемах основаны на ЛАД и имеют схожую конструкцию, что позволяет на начальном этапе моделирования и исследования свести их к общей схеме.
|
|
|
À |
|
|
|
|
À-À |
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
8 |
4 |
6 |
9 |
3 |
2 |
1 |
10 |
2 |
7 |
1 |
|
|
|
|
|
6 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
4 


 5
5
À |
а |
б |
Рис. 1. Кинематическая схема вибрационного сепаратора с ЛАД, подвешенного на упругих элементах: а – вид сбоку; б – разрез А–А; 1 – дека; 2, 3 – упругие подвески деки; 4, 5 – части статора ЛАД; 6, 7 – вторичные элементы ЛАД; 8, 9 – упругие элементы привода; 10 – сепарируемый материал
À
8 |
6 |
4 |
9 |
1 |
1 |
À-À |
11 |
|
4 |
5 |
6 |
7 |
2 |
3 |
2 |
2 |
10 |
|
|
10 |
À |
а |
б |
Рис. 2. Конструкция вибрационного сепаратора с ЛАД, установленного на упругих элементах: а – вид сепаратора сбоку; б – вид А
79

На рис. 3 показана упрощенная рас- |
магнитное поле. Под воздействием пе- |
|||||||
четная схема вибрационного сепаратора |
ременного магнитного поля на вторич- |
|||||||
на базе ЛАД с указанием действующих |
ном элементе 5 ЛАД индуцируется ЭДС. |
|||||||
на сепарируемый материал 6 сил, решет- |
При взаимодействии |
магнитного поля |
||||||
ный стан 2 и индуктор ЛАД 4. Расчетная |
индуктора 4 и тока во вторичном эле- |
|||||||
схема включает решетный стан 2, |
менте |
5 |
возникает |
электромагнитная |
||||
установленный на основании на упругих |
сила, действующая на индуктор и вто- |
|||||||
элементах 1, и вибровозбудитель на |
ричный элемент, заставляющая их |
|||||||
базе ЛАД. Вторичный элемент |
ЛАД 5 |
двигаться встречно-параллельно относи- |
||||||
горизонтально |
закреплен |
концами |
тельно друг друга. |
|
|
|||
к решетному стану 2. Индуктор ЛАД 4 |
ЛАД |
преобразует |
электрическую |
|||||
имеет длину меньше вторичного эле- |
энергию непосредственно в поступатель- |
|||||||
мента, установлен с возможностью |
ную без применения каких-либо преоб- |
|||||||
возвратно-поступательного перемеще- |
разователей вида движения, а за счет ре- |
|||||||
ния вдоль вторичного элемента и свя- |
верса или циклического включения пи- |
|||||||
зан с решетным станом 2 упругими эле- |
тания с помощью блока управления |
|||||||
ментами. |
|
|
осуществляется |
возвратно-поступа- |
||||
Решетный стан совершает возврат- |
тельное (колебательное) движение. |
|||||||
но-поступательное движение под дина- |
По рис. 3 составлены уравнения |
|||||||
мическим воздействием на него индук- |
сил, действующих на вторичный эле- |
|||||||
тора |
ЛАД 4 через упругие элементы 3 и |
мент, решетный стан и сепарируемый |
||||||
вторичный элемент 5. |
|
материал, и построена математическая |
||||||
Перемещения |
сепарируемого мате- |
модель их движения с применением ку- |
||||||
риала 6 происходят за счет силы инер- |
сочно-постоянных функций Хевисайта |
|||||||
ции при резких изменениях скорости |
θ(х) и «сигнум» sign(х). Применение |
|||||||
решетного стана 2. |
|
данных функций значительно упрощает |
||||||
ЛАД работает следующим образом: |
процесс математического и компьютер- |
|||||||
при подключении индуктора 4 блоком |
ного |
моделирования |
технологической |
|||||
управления (на рисунке не показан), |
машины с возвратно-поступательным |
|||||||
вдоль |
индуктора |
создается |
бегущее |
движением [2]. |
|
|
||
Рис. 3. Расчетная схема вибрационного сепаратора на базе ЛАД: 1, 3 – упругие элементы; 2 – решетный стан; 4 – индуктор ЛАД; 5 – вторичный элемент ЛАД; 6 – сепарируемый материал
80