

2809.Автоматизация в электроэнергетике и электротехнике
..pdfРассмотрим, как создается режим нагрузки синхронного двигателя. Двигатель возбуждается номинальным током, его угловая характеристика имеет вид, представленный на рис. 4. Для изменения нагрузочного режима двигателя деформируем угловую характеристику синхронного генератора изменением его тока возбуждения. При малом токе возбуждения критический момент генератора станет меньше, его угловая характеристика по оси моментов сожмется и установившийся режим наступит при малом угле нагрузки θ.
Если увеличить ток возбуждения генератора, то критический момент машины увеличится, угловая характеристика генератора по оси моментов растянется и установившийся режим наступит при большем угле нагрузки θ.
Установившийся режим с углом нагрузки θн наступит при номинальном токе возбуждения генератора. Угловая характеристика генератора при этом токе возбуждения примет вид, представленный на рис. 4.
На рис. 5 и 6 приведены рабочие характеристики машин нагрузочного устройства, содержащего две синхронные машины серии СТД-12500 (Uн = 10 000 В,
Iн = 819,8 А, Pн = 12 500 кВт, nн = = 3000 об/мин), в режиме загрузки син-
хронного двигателя. Характеристики получены путем изменения тока возбуждения синхронного генератора в диапазоне от нуля до номинального значения.
Анализ рабочих характеристик СД показывает следующее: активная мощность Р1д, потребляемая двигателем из сети, и ток I1д обмотки статора растут по величине; реактивная мощность двигателя Q1д является емкостной и уменьшается; коэффициент мощности двигателя cosφ1д и угол нагрузки θ возрастают.
Анализ рабочих характеристик СГ показывает следующее: активная мощность Р1г, отдаваемая генератором в сеть,
Рис. 5. Рабочие характеристики СД нагрузочного устройства
Рис. 6. Рабочие характеристики СГ нагрузочного устройства
и ток обмотки статора I1г растут по величине; реактивная мощность генератора Q1г при малых токах возбуждения является индуктивной и уменьшается по величине, а при больших токах возбуждения становится емкостной и возрастает; коэффициент мощности генератора cosφ1г растет и достигает значения, равного единице, а затем уменьшается; угол нагрузки θг генератора уменьшается.
Расчеты показали, что данное нагрузочное устройство имеет высокий КПД во всем диапазоне нагрузочного режима синхронного двигателя (рис. 7). Актив-
151
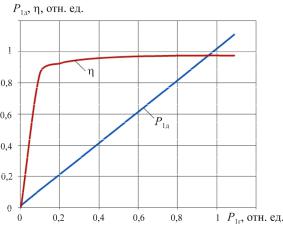
Рис. 7. Зависимость КПД устройства от нагрузки
ная мощность, потребляемая синхронным двигателем из сети, возвращается генератором в сеть за вычетом потерь в обмотках статора и обмотках возбуждения машин, потерь в стали и механических потерь.
Выводы. Предлагаемое нагрузочное устройство обеспечивает рекуперацию энергии в сеть и имеет высокий КПД практически во всем диапазоне изменения нагрузки.
Список литературы
1.Сипайлов Г.А., Лоос А.В. Математическое моделирование электрических машин. – М.: Высш. шк., 1980. – 176 с.
2.Трефилов В.А. Установившийся режим работы электромашинной системы с двухмашинным агрегатом. Электрические машины и электромашинные системы // Cб. науч. тр. ПГТУ. – Пермь, 2003. – С. 61–66.
152
УДК 621.313.3
ИССЛЕДОВАНИЕ ХАРАКТЕРИСТИК ТЯГОВОГО ЛИНЕЙНОГО АСИНХРОННОГО ДВИГАТЕЛЯ
Ф.Н. Сарапулов, С.Ф. Сарапулов, С.Е. Миронов, И.Е. Родионов, И.А. Смольянов
Уральский федеральный университет имени первого Президента России Б.Н. Ельцина, Екатеринбург
Рассматривается методика расчета тяговых характеристик линейного асинхронного двигателя на основе детализированных электрических и магнитных схем замещения. Приводятся результаты расчета его характеристик, полученные при различной дискретизации области моделирования по толщине. Показано влияние учета поперечного краевого эффекта на характеристики двигателя.
Ключевые слова: линейный асинхронный двигатель, тяговые характеристики, нормальные усилия, энергетические параметры, детализированные схемы замещения.
RESEARCH OF CHARACTERISTICS OF THE TRACTION LINEAR
ASYNCHRONOUS MOTOR
F.N. Sarapulov, S.F. Sarapulov, S.E. Mironov, I.E. Rodionov, I.A. Smolianov
Ural Federal University named after the first President of Russia Boris Yeltsin, Ekaterinburg
The method of calculation of traction characteristics of the linear asynchronous motor on the basis of the detailed electric and magnetic equivalent circuits is considered. The results of calculation of its characteristics received at various sampling of area of modeling on thickness are given. Influence of the accounting of cross regional effect on characteristics of the motor is shown.
Keywords: linear asynchronous motor, traction characteristics, normal efforts, power parameters, detailed equivalent circuits.
В работе рассматриваются характе- |
слева и справа от активной зоны), по |
|
ристики тягового линейного асинхрон- |
толщине (начиная от внутренней по- |
|
ного двигателя, полученные методом де- |
верхности индуктора) – 2 слоя воздуш- |
|
тализированных электрических и маг- |
ного зазора, 2 слоя алюминиевого по- |
|
нитных схем замещения [1, 3]. |
крытия, 8 слоев ферромассивного сер- |
|
Основные |
параметры индуктора |
дечника вторичного элемента (ВЭ) и 2 |
трехфазного |
линейного асинхронного |
слоя воздуха (рис. 1). Отсчет слоев на- |
двигателя, предназначенного для приво- |
чинается от поверхности индуктора. За |
|
да транспортной системы: длина индук- |
базовые значения магнитной проницае- |
|
тора 2,24 м, ширина его сердечника 0,48 |
мости и электропроводности принима- |
|
м, толщина индуктора 0,13 м, глубина |
ются значения, соответствующие слоям |
|
паза 0,07 м, ширина паза 0,06 м, ширина |
алюминиевого покрытия ВЭ. Толщины, |
|
зубца 0,033, число пазов 24. Моделируе- |
относительные значения магнитной про- |
|
мая область двигателя включает в себя |
ницаемости и электропроводности слоев |
|
по длине активную зону (24 зубцовых |
зоны моделирования (в пакете Mathcad): |
|
деления) и две краевых (по 24 деления |
|
|
153
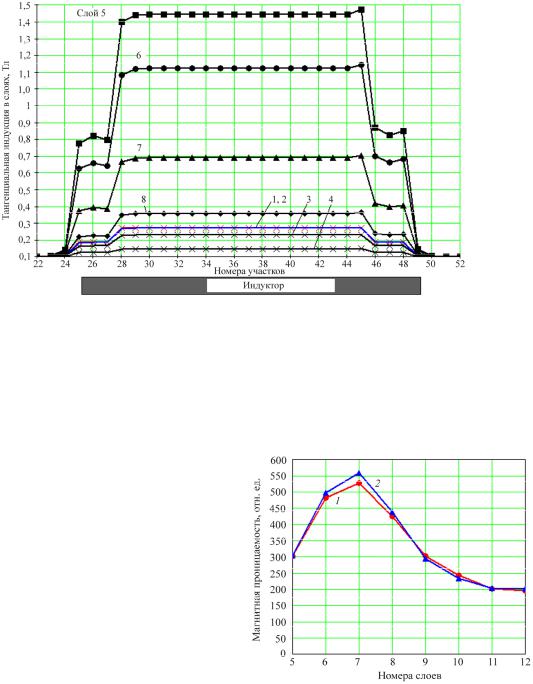
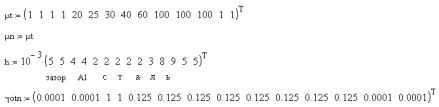
Рис. 1. Распределение тангенциальной составляющей магнитной индукции по длине слоев (c 1-го по 8-й)
Конечные значения магнитной проницаемости ферромассивных слоев ВЭ подбираются методом последовательных приближений для средней по длине области. Зависимость магнитной проницаемости стального слоя от магнитной индукции и температуры задается выражением [2]
|
|
T |
2 |
||
f4 (z) =1+( f2 (z) −1) 1 |
− |
t |
|
, |
|
750 |
|||||
|
|
|
|
||
|
|
|
|
|
|
где функция f2 (z) = f2 (B) получена на основе кривой намагничивания стали для температуры Tt = 20 °C.
На рис. 1 показано распределение магнитной индукции в зазоре и во ВЭ по длине индуктора при неподвижном ВЭ.
Как видно, магнитный поток сосредоточен в поверхностных слоях стального сердечника ВЭ. С учетом рис. 1 принимаем магнитную проницаемость в каждом слое одинаковой по всей его длине. Полученные на 13-й итерации кривые распределения магнитной проницаемости в слоях показаны на рис. 2.
Основные показатели, полученные для данного режима работы: тяговое
усилие 2942 Н, нормальное усилие (отталкивания) 4982 Н, активная мощность 77 кВт, напряжение 171 В, ток фазы индуктора 312 А, плотность тока 4,8 А/мм2.
Рис. 2. Исходная 1 и полученная при расчете 2 кривые распределения магнитной проницаемости по стальным слоям ВЭ
Кривые распределения тягового усилия по длине слоев ВЭ показаны на рис. 3 (номер слоя указан в индексе обозначения усилия). Как видно, основной вклад в тяговое усилие дают алюминиевые слои 3 и 4, ферромагнитные массивные слои создают на порядок меньшие усилия.
154
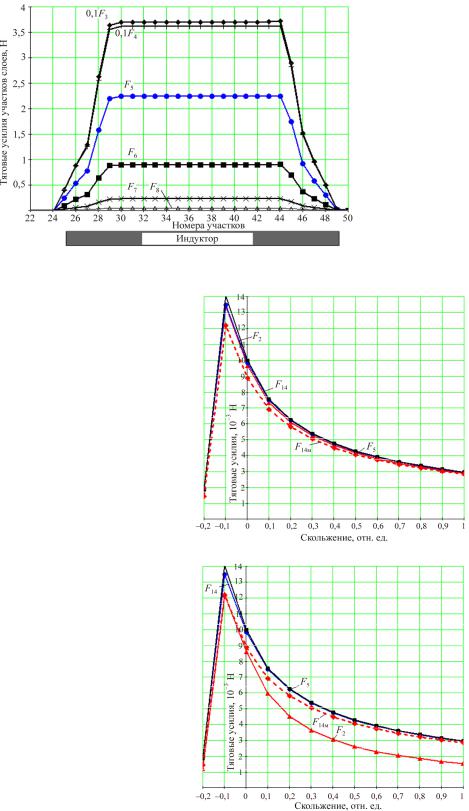
Рис. 3. Распределения тягового усилия по длине слоев ВЭ
Существенный интерес представляет вопрос о выборе количества слоев при моделировании линейного электродвигателя. На рис. 4 показаны расчетные зависимости, полученные при помощи моделей с различным количеством слоев ВЭ (2, 5, 14 слоев и 14 слоев с 7 ферромассивными во ВЭ).
Легко видеть, что поскольку основной вклад в создание тягового усилия вносят алюминиевые слои,
– то замена при расчете массивных слоев ВЭ шихтованными несущественно изменяет тяговую характеристику двига-
теля F14 и F14м;
– пренебрежение влиянием попе-
речного краевого |
эффекта |
приводит |
к существенному |
искажению |
тяговой |
характеристики (F2 на рис. 4, б);
– зависимости усилий, полученных с помощью математических моделей двух-, пяти-, и четырнадцатислойных ДМСЗ, практически не отличаются друг от друга.
Анализ рабочих характеристик (рис. 5), полученных с помощью двухслойной ДМСЗ, показывает, что двигатель даже при большом немагнитном зазоре 19 мм и плотности тока 4,8 А/мм2 имеет достаточно высокие энергетические показатели: в области высоких скоростей КПД η достигает 80 %, а коэффи-
а
б
Рис. 4. Тяговые усилия: а – рассчитанные при помощи моделей с различным числом слоев в области моделирования; б – для двухслойной ДМСЗ электропроводность ВЭ определена без учета поперечного краевого
эффекта
155
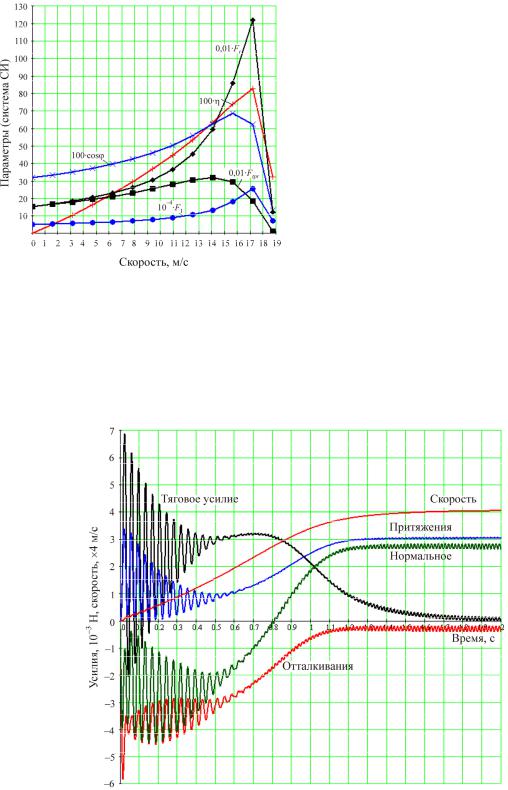
циент мощности cosφ = 0,69. При этом потребляемая мощность P1 = 260 кВт, тяговое усилие Ft = 12 кН, нормальное усилие (притяжения) Ftpr = 2 кН.
Рис. 5. Рабочие характеристики, определенные по двухслойной модели с учетом поперечного краевого эффекта при фиксированном токе индуктора
На рис. 6 показаны кривые изменения усилий – тягового, притяженияи отталкивания индуктора от вторичного элемента, полного нормального, а также скорости при прямом включении двигателя на напряжение 180 В. В основу положена двухслойная ДМСЗ без учета токов в ферромассивном слое ВЭ и поперечного краевого эффекта. Программа расчета реализована в пакете Mathсad. Указанный расчет занимает 15 мин на компьютере средних возможностей. Можно отметить, что в начале переходного процесса наблюдается пульсирующая составляющая усилия, порожденная апериодическими составляющими фазных токов индуктора. Важно также, что нормальное усилие по мере разгона изменяет знак, «нагружая» или «разгружая» транспортное средство. При расчете применен приближенный учет поперечного КЭ путем умножения электропроводности ВЭ на коэффициент Болтона [1] в начале пуска (γ · kq = = 0,33 · 108 · 0,529 1/Ом·м).
Рис. 6. Характеристики ТЛАД при прямом пуске от напряжения 180 В
156
Приведенные выше материалы де- |
Список литературы |
||
монстрируют |
широкие |
возможности |
1. Веселовский О.Н., Коняев А.Ю., |
применения детализированных схем за- |
|||
мещения в практике разработки и иссле- |
Сарапулов Ф.Н. Линейные асинхронные |
||
дования линейных асинхронных двига- |
двигатели. – М.: Энергоатомиздат, |
||
телей. Они позволяют получить обшир- |
1991. – 256 с. |
||
ную информацию о статических и |
2. Кувалдин А.Б. Индукционный |
||
динамических |
характеристиках таких |
нагрев ферромагнитной стали. – М.: |
|
электрических |
машин |
средствами |
Энергоатомиздат, 1988. – 200 с. |
Mathсad и Simulink MatLab, не прибегая |
3. Сидоров О.Ю., Сарапулов Ф.Н., |
||
к использованию конечно-элементных |
Сарапулов С.Ф. Методы конечных эле- |
||
пакетов, имеющих определенные огра- |
ментов и конечных разностей в электро- |
||
ничения в исследовании |
динамических |
механике и электротехнологии. – М.: |
|
режимов систем. |
|
Энергоатомиздат, 2010. – 331 с. |
|
157
УДК 621.313.282: 622.276.054.23
ЦИЛИНДРИЧЕСКИЙ ЛИНЕЙНЫЙ ВЕНТИЛЬНЫЙ ЭЛЕКТРОДВИГАТЕЛЬ ДЛЯ ПОГРУЖНОГО БЕСШТАНГОВОГО НАСОСА
А.Т. Ключников, А.Д. Коротаев, Н.В. Шулаков, С.В. Шутемов
Пермский национальный исследовательский политехнический университет
Рассмотрено моделирование различных конструкций статора и ротора цилиндрического линейного вентильного двигателя. Выбрана оптимальная по усилию конструкция. Выполнена экспериментальная проверка полученных результатов.
Ключевые слова: линейный двигатель, постоянные магниты, угловая статическая характеристика, привод.
CYLINDRICAL LINEAR AC ELECTRONIC MOTOR FOR OPERATION PUMP
A.T. Klyuchnikov, A.D. Korotaev, N.V. Shulakov, S.V. Shutemov
Perm National Research Polytechnic University
Consider modeling of various designs of stator and rotor cylindrical linear ac electronic motor. Selects the best design for traction. The experimental verification of the results.
Keywords: linear motor, permanent magnets, angular static characteristic, drive.
Цилиндрический |
линейный |
вен- |
консервации таких скважин. Это позво- |
||||
тильный электродвигатель (ЦЛВД) мож- |
лит более тщательно производить отбор |
||||||
но использовать для |
электроприводов |
нефти из стареющих месторождений и, |
|||||
возвратно-поступательного |
движения |
соответственно, повысить коэффициент |
|||||
различных общепромышленных |
меха- |
извлечения нефти. Также применение |
|||||
низмов, а также в нефтедобывающей |
ПБЭНА должно снизить затраты элек- |
||||||
промышленности для безштанговой до- |
троэнергии, что обусловлено отсутстви- |
||||||
бычи нефти из скважин, в качестве аль- |
ем необходимости подъема веса колон- |
||||||
тернативы широко распространенных в |
ны штанг. |
|
|
|
|||
настоящее время станков-качалок. Для |
ЦЛВД вместе с плунжерным насо- |
||||||
этого ЦЛВД включают в состав погруж- |
сом опускается в скважину, а на обмотку |
||||||
ного бесштангового |
электронасосного |
двигателя с помощью длинного кабеля |
|||||
агрегата с целью добычи нефти из мало- |
подается трехфазное напряжение от пре- |
||||||
дебитных скважин. Основным принци- |
образователя частоты (ПЧ), который на- |
||||||
пом действия штангового насоса являет- |
ходится на поверхности вблизи устья |
||||||
ся возвратно-поступательное движение |
скважины. |
|
|
|
|||
поршня, связанного посредством штока |
ЦЛВД |
с |
постоянными магнитами |
||||
с электродвигателем типа ЦЛВД. С при- |
конструктивно |
отличается от |
обычных |
||||
менением ПБЭНА становится возможна |
электрических машин лишь тем, что |
||||||
добыча нефти в скважинах глубиной бо- |
магнитное поле перемещается по пря- |
||||||
лее 2 км, с большой кривизной, а также в |
мой, т.е. по направлению оси ротора. |
||||||
горизонтальных скважинах. При исполь- |
Но принцип действия, основанный на |
||||||
зовании агрегата исчезает |
потребность |
движении |
электромагнитного |
поля и |
|||
подготовки фундамента под станок- |
создании электромагнитных сил, со- |
||||||
качалку, что существенно снижает риски |
храняется |
и |
соответствует |
принципу |
|||
158
действия обычного синхронного двигателя (СД).
Особенностью вентильного двигателя (ВД) является использование преобразователя частоты – коммутатора (ПЧ), работающего согласованно с датчиком положения ротора (ДП). При таком сочетании СД с преобразователем и датчиком положения электрическую машину можно называть бесконтактным двигателем постоянного тока или ВД.
Таким образом, основой для расчета характеристик ЦЛВД является теория синхронных машин.
Погружной ЦЛВД состоит из отдельных модулей, длина которых составляет 960 мм. В зависимости от необходимого тягового усилия определяется число модулей в составе электронасосного агрегата и длина реального ЦЛВД.
Характеристики модуля ЦЛВД при длине 960 мм:
–номинальное усилие модуля двигателя составляет 400 кГс при фазном токе 30 А;
–частота питающего напряжения
0,5–7 Гц;
–число двойных ходов 0,5–6 в ми-
нуту;
–длина хода штока 0,6–1,2 м.
Вмодуль ЦЛВД встроен датчик измерения температуры обмотки индуктора и датчик нулевого положения штока.
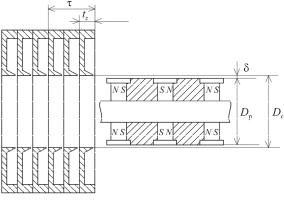
ЦЛВД состоит из неподвижного круглого индуктора и штока с постоянными магнитами. Постоянные магниты группы 4МКГ46х21х8, имеющие сле-
дующие параметры: Нс = 1400 кА/м, Вr = 1,2 Тл. Продольный разрез ЦЛВД (статора и ротора) показан на рис. 1. На индукторе имеются зубцы и пазы, в которых находятся цилиндрические ка-
тушки статора. Полюсное деление τ = 30, а зубцовое деление tz = 10. Катушки соединяются последовательно на
протяжении длины индуктора и образуют трехфазную обмотку, которая питается от преобразователя частоты (ПЧ). Обмотка цилиндрического индуктора создает бегущее магнитное поле, скорость движения которого и направление изменяются с помощью ПЧ. Ротор имеет диаметр Dp = 53. Зазор δ между статором и ротором составляет 1,5 мм по всей длине.
Рис. 1. Продольный разрез статора
иротора
Ввентильном двигателе – ЦЛВД скорость электромагнитного поля определяется выражением
vэм = 2 τf . |
(1) |
Известно, что скорость движения магнитного поля в воздушном зазоре ЦЛВД определяется частотой питающего напряжения f и межполюсным расстоянием τ, которое неизменно в кон-
кретном двигателе, и |
в нашем случае |
τ = 0,03 м. |
|
Поскольку в ЦЛВД скорость элек- |
|
тромагнитного поля |
равна скорости |
штока (принцип действия синхронной машины), то максимальная частота питающего напряжения, подаваемая на обмотку статора двигателя,
fmax = |
vmax |
. |
(2) |
|
|||
|
2τ |
|
|
159

Напряжение источника энергии – преобразователя частоты определяется по закону
U = 2 R1 Iзад + ∆U f , |
(3) |
где R1 – сопротивление обмотки статора; Iзад – ток статора прямого движения; ∆U – добавка напряжения на 1 Гц частоты.
Для расчета ЦЛВД используются современные представления о расчете электромагнитного поля с помощью основных уравнений электродинамики, записанных в дифференциальной форме. При этом расчетная модель двигателя разбивается на определенное число элементов и на базе уравнений Пуассона и Лапласа с использованием необходимых граничных условий производится расчет электромагнитного поля методом конеч- но-разностных элементов.
Эта методика позволяет рассчитать электромагнитное поле в каждой точке расчетной модели двигателя, учесть насыщение магнитной системы, а затем определить рабочие характеристики ЦЛВД с повышенной точностью.
Использовалась модульная структура построения ЦЛВД (рис. 2).
Рис. 2. Стенд для динамических испытаний модуля ЦЛВД
Модули соединяются между собой в единый статор последовательно для
получения необходимой величины усилия на роторе. Между модулями расположены подшипники скольжения. Каждый модуль статора состоит из 96 зубцовых делений. Все расчеты проводились для одного модуля ЦЛВД. Внешний диаметр статора определялся размером обсадных труб скважины. Внутренний диаметр выбирали из необходимого компромисса между максимальным диаметром ротора с магнитами, с одной стороны, и необходимостью уложить в элемент магнитопровода статора как можно большее количество ампервитков, для увеличения линейной токовой нагрузки и тягового усилия – с другой. Толщина элемента магнитопровода определяет длину полюсного деления и рабочую частоту питающего напряжения. Значение толщины элементов магнитопровода оптимизируется при расчете.
Индуктор неподвижен, а шток совершает возвратно-поступательные движения с различной величиной хода и частоты. Одно направление движения штока является рабочим (перемещение вверх). В этом направлении усилие имеет наибольшую величину. В обратном направлении шток перемещается без рабочего усилия в режиме холостого хода до исходного положения.
ЦЛВД питается от ПЧ, который, в свою очередь, управляется компьютером через кабельную связь RS-485. Управление электроприводом ЦЛВД позволяет регулировать число двойных ходов от 0,2 до 6 и ход штока в одном направлении в пределах 1,2–2 м в соответствии с техническим заданием. Силу на штоке можно изменять с помощью тока ЦЛВД. При этом следует учесть, что электромагнитная сила превышает силу, зафиксированную динамометром, на величину сил трения штока в подшипниках. Зависимость усилия, которое равно
160