

2809.Автоматизация в электроэнергетике и электротехнике
..pdfСодержание работы. Основу мо-
бильной испытательной станции составляет ноутбук промышленного класса с подключенной к нему через интерфейс USB-платой ввода-вывода из состава NI CompactRIO. Плата ввода-вывода подключается к оборудованию испытательного стенда при помощи коннектора, состоящего в основном из датчиков тока и напряжения. Для регулирования тока возбуждения испытуемой синхронной машины при снятии ее характеристик используется штатный, входящий в комплект оборудования возбудитель или дополнительный статический тиристорный возбудитель с микропроцессорной системой управления (например, Simoreg DC Master). Структурная схема такой системы представлена на рис. 1. В ноутбуке содержится программный комплекс, который позволяет:
–производить снятие необходимых характеристик в ручном, полуавтоматическом и автоматическом режимах;
–дистанционно управлять всем процессом испытаний;
–производить обработку полученных данных и определять статические и динамические параметры испытуемой машины;
–автоматически формировать отчет
орезультатах испытаний;
– заносить результаты испытаний для сохранения в базу данных.
К процессу испытаний, как и к процессу производства синхронных машин, предъявляются требования, которые оговариваются в соответствующих стандартах. Анализ требований стандартов Российской Федерации (ГОСТ), Международной электротехнической комиссии (МЭК) и Института инженеров по электротехнике и электронике (IEEE) к испытаниям синхронных машин показал, что основные опыты и методы обработки их результатов, приведенные в стандартах разных стран, в основном совпадают [1–6]. Испытания состоят из опытов холостого хода, короткого замыкания, V-образной характеристики, нагрузочного испытания со снятием угловой характеристики и испытания в длительном режиме для определения нагревов. Из этих опытов по предварительно снятым характеристикам определяются статические параметры машины. К ним относятся: синхронное индуктивное сопротивление по продольной оси машины (насыщенное и ненасыщенное значение); расчетное индуктивное сопротивление; ток возбуждения, соответствующий номинальному напряжению по характеристике холостого хода; номинальный ток возбуждения; ток возбу-
Рис. 1. Блок-диаграмма мобильной испытательной станции
251
ждения при установившемся коротком замыкании, соответствующий номинальному току обмотки якоря; составляющая тока возбуждения воздушного зазора; отношение короткого замыкания; статическая перегружаемость; ток реакции якоря, приведенный к ротору; ток симметричного короткого замыкания; коэффициент насыщения стали сердечника; кратность тока короткого замыкания. Одновременно со снятием характеристик холостого хода и короткого замыкания параллельно снимаются характеристики потерь холостого хода и потерь короткого замыкания и по методу тарированного приводного двигателя определяются отдельные составляющие потерь и КПД испытуемой машины. Основным опытом определения динамических параметров машины на протяжении более 75 лет является опыт внезапного трехфазного короткого замыкания. Данный опыт рекомендуется всеми вышеперечисленными стандартами. К динамическим параметрам относятся постоянные времени и индуктивные сопротивления обмоток машины.
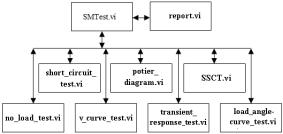
Требование соблюдения стандартов определило структуру разработанного программного комплекса для автоматизации испытаний синхронных неявнополюсных машин. Комплекс SMTest (рис. 2) реализован в среде графического программирования LabVIEW. Он состоит из взаимосвязанных виртуальных приборов (ВП): ВП опыта холостого хода (no_load_test.vi); ВП опыта установившегося короткого замыкания (short_circuit_ test.vi); ВП опыта V-образной характеристики (v-curve_test.vi); ВП построения диаграммы Потье (potier_diagram_vi); ВП опыта внезапного трехфазного короткого замыкания (SSCT.vi); ВП снятия переходной характеристики и определения параметров ПИД-регулятора (transient_ response_ testi.vi); ВП снятия угловой ха-
рактеристики (load-angle-curve_test.vi);
ВП формирования отчета (report.vi) и программы управления процессом испытаний (SMTest.vi). Структура комплекса открыта и при необходимости допускает возможность включения дополнительных ВП.
Рис. 2. Структурная схема программного комплекса SMTest
Программный комплекс SMTest представляет собой кросс-платформен- ное приложение, которое способно работать под управлением любой операционной системы (например, операционной системы семейств Windows, Linux, OS X
и др.), поддерживающей драйверы NIDAQ и набор библиотек Run-time engine.
Для определения статических параметров в виртуальных приборах использованы алгоритмы аналитической интерпретации графических построений, изложенных в стандартах. Характеристики машины аппроксимируются уравнениями регрессии различных порядков с контролем среднеквадратичной нормы. Для исключения больших случайных выбросов при аппроксимации применено известное правило «3 сигма». В дальнейшем по найденным аналитическим зависимостям производится автоматическое построение диаграммы Потье и по формулам определяются основные статические параметры, потери и КПД машины [7].
Определение динамических параметров машины в ВП SSCT.vi происходит в 3 этапа:
252
1) регистрация переходного процесса; |
Метод |
реализован |
в |
алгоритмах |
|||||||
2) выделение из процесса огибающих; |
двух внутренних ВП. ВП Angle.vi пред- |
||||||||||
3) расчет динамических параметров |
назначен для определения частоты, ам- |
||||||||||
машины на основе анализа огибающих. |
плитуды, начальной фазы синусоидаль- |
||||||||||
В алгоритме расчета динамических |
ных сигналов, снимаемых с датчиков |
||||||||||
параметров использован разработанный |
напряжения и тока, а также угла сдвига |
||||||||||
авторами |
комбинированный оптимиза- |
фаз между напряжением и током в уста- |
|||||||||
ционный метод [7]. Постоянные времени |
новившихся режимах. ВП OVKZ.vi пред- |
||||||||||
в предварительно определенных по фор- |
назначен для определения точек оги- |
||||||||||
мулам границах определяются методом |
бающих сигналов в переходных режи- |
||||||||||
покоординатного спуска, а начальные |
мах. В программной среде LabVIEW |
||||||||||
значения |
составляющих |
переходного |
имеется ВП Extract Single Tone Informa- |
||||||||
процесса на каждом шаге процесса по- |
tion VI по функциям аналогичный ВП |
||||||||||
иска – аналитически по формулам, выве- |
Angle.vi. В его алгоритме реализован ме- |
||||||||||
денным на основе метода наименьших |
тод, который основан на использовании |
||||||||||
квадратов. Затем по найденным в про- |
быстрого преобразования Фурье входно- |
||||||||||
цессе поиска постоянным времени и на- |
го сигнала, ограниченного с помощью |
||||||||||
чальным значениям составляющих рас- |
окна Ханна. После разложения сигнала |
||||||||||
считываются все остальные динамиче- |
отыскивается гармоника |
с |
наибольшей |
||||||||
ские параметры машины. |
|
|
|
амплитудой, для которой и определяют- |
|||||||
Наличие помех в каналах связи вы- |
ся параметры сигнала. |
|
|
||||||||
числительного |
комплекса |
с |
испытуемой |
Сравнительный анализ результатов |
|||||||
машиной существенно влияет на точность |
исследования показал, что ВП Angle.vi |
||||||||||
определения статических и динамических |
обеспечивает более точное определение |
||||||||||
параметров машины. Для фильтрации |
параметров сигналов напряжения и тока, |
||||||||||
помех возникающих в |
каналах |
связи, |
чем стандартный лицензионный прибор |
||||||||
в алгоритмах определения частоты, ам- |
Extract Single Tone Information VI. В ча- |
||||||||||
плитуды и начальной фазы синусоидаль- |
стности, при уровне помех 20 % от |
||||||||||
ных сигналов, снимаемых с датчиков тока |
уровня полезного сигнала среднеквадра- |
||||||||||
и напряжения в установившихся режи- |
тичные отклонения погрешностей разра- |
||||||||||
мах, и точек огибающих сигналов в пере- |
ботанного ВП и стандартного составля- |
||||||||||
ходных |
режимах использован |
новый |
ют при определении: частоты – соответ- |
||||||||
разработанный |
авторами |
эффективный |
ственно 0,25 и 0,45 |
%; амплитуды – 2 |
|||||||
адаптивный метод скользящей тригоно- |
и 2,5 %; начальной фазы – 1 и 2 %; угла |
||||||||||
метрической аппроксимации [8]. В основу |
сдвига фаз – 0,5 и 2,5 % [9]. |
|
|||||||||
метода положена аппроксимация участ- |
Анализ |
результатов |
|
тестирования |
|||||||
ков зарегистрированного |
сигнала |
возле |
ВП OVKZ.vi |
на модельных процессах |
|||||||
экстремальных точек эквивалентной си- |
и на процессах, которые были зафикси- |
||||||||||
нусоидой. Определение границ участков, |
рованы при заводских стендовых испы- |
||||||||||
«тяготеющих» к экстремальным точкам, |
таниях, показал: при числе точек на по- |
||||||||||
выполняется операцией |
центрирования, |
ловине |
периода N = 25 |
и |
разрядности |
||||||
т.е. смещения за счет итерационного про- |
числа в 16 бит относительная погреш- |
||||||||||
цесса начала координат таким образом, |
ность предложенного метода при вычис- |
||||||||||
чтобы экстремальная точка находилась по |
лении |
координат |
точек |
огибающих |
|||||||
возможности в середине рассматриваемой |
не превышает 1 %; при появлении слу- |
||||||||||
области. |
|
|
|
|
|
чайной |
составляющей, |
доходящей до |
|||
253

30 % от уровня полезного сигнала, относительная погрешность не превышает 3 %. Такое значение погрешности обусловлено тем, что для выделения огибающих используются только участки кривой переходного процесса возле экстремальных точек.
На программы Angle.vi и OVKZ.vi,
а также на комплекс SMTest получены свидетельства о государственной реги-
страции [10–12].
Для сокращения времени снятия статических характеристик испытуемой машины в автоматическом или ручном режиме в структуре комплекса имеются специально разработанные ВП: nsv_sit_pid_cjntrol.vi, nsv_sit_if_cjntrol.vi и nsv_sit_read_data.vi – для синтеза кон-
тура регулирования тока возбуждения с ПИД-регулятором, который обеспечивает форсировку возбуждения с допустимым значением перерегулирования. Предварительное снятие переходной характеристики, на основании которой рассчитываются оптимальные параметры настройки регулятора по критерию модульного оптимума, производится в ВП transient_response_testi.vi. Оптималь-
ные параметры настройки регулятора определяются в ВП PID_optimization.vi,
входящего в состав ВП transient_ response_testi.vi.
Моделированием установлено, что программно-аппаратная реализация предложенного способа форсировки при автоматическом снятии статических характеристик синхронных машин в диапазоне мощностей от 320 кВт до 12,5 МВт позволит сократить время снятия характеристик в 3–5 раз [13]. Этот показатель приведет к снижению затрат на проведение испытаний машин средней и большой мощности.
Для проверки работоспособности предлагаемой мобильной испытательной станции и функций разработанного для
нее программного обеспечения был создан лабораторный стенд на базе синхронного генератора Г273 от автомобиля КамАЗ (рис. 3, 4) [14].
Рис. 3. Внешний вид лабораторного стенда
Рис. 4. Испытуемый синхронный генератор (слева) и приводной тарированный асинхронный двигатель (справа) (защитный кожух с машин снят)
В состав стенда входят:
• асинхронный короткозамкнутый двигатель АИР72В2 с номинальными паспортными данными: Pн = 1,1 кВт,
Uн = 380 В, Iн = 2,5 A, nн = = 2990 об/мин, ηн = 78,5 %, cosφн = 0,8;
• автомобильный |
синхронный |
|
ге- |
||||
нератор Г273 с данными: Pмакс |
= 780 Вт, |
||||||
Uн = |
28 В, I |
= |
20 |
A |
при |
n |
= |
= 1100 |
об/мин, I |
= |
28 |
A |
при |
n |
= |
= 2200 об/мин, Iвозб. макс |
= 3,4 A; |
|
|
||||
254

•блок управления стендом и регулирования тока возбуждения синхронного генератора;
•блок нагрузки синхронного генератора;
•мобильная испытательная станция, которая, в свою очередь, состоит:
− из ноутбука промышленного клас-
са под управлением операционной сис-
темы Windows;
−программного обеспечения для проведения опытов (комплекс SMTest);
−платы сбора данных NI USB-6210 (16 аналоговых входов, 4 цифровых входа, 4 цифровых выхода, два 32-битных счетчика, питание от шины USB);
−кросс-коннектора, состоящего из блока стандартных датчиков тока и напряжения с гальванической развязкой на основе элементов Холла и блока питания датчиков.
На рис. 5 приведена характеристика КПД синхронного генератора Г273, полученная с помощью мобильной станции.
Рис. 5. Характеристика КПД генератора: сплошная линия – полученная в автоматическом режиме; точки – значения КПД, полученные в ручном режиме, по показаниям измерительных приборов
Создание лабораторного стенда с машинами средней и большой мощности сопряжено с большими финансовыми затратами. Кроме того такой стенд должен иметь в своей структуре высокона-
дежную систему предотвращения аварийных ситуаций. В связи с этим для тестирования разработанного программного комплекса применительно к испытуемым синхронным машинам средней и большой мощности были использованы современные средства программноаппаратного моделирования (HIL).
Реальный физический объект – испытуемая синхронная электрическая машина – был заменен математической моделью, которая реализована в среде визуального моделирования MatLAB + Simulink. Модель конвертировалась мастерской реального времени Real Time Workshop и с использованием набора библиотек Simulation Interface Toolkit
среды разработки LabVIEW загружалась на контроллер NIPXIe-8133, где выполнялась в среде реального времени. Связь разработанного программного комплекса с испытуемой моделью синхронной машины также осуществлялась с использованием набора библиотек Simulation Interface Toolkit. Структурная схема полученного программно-аппаратного комплекса приведена на рис. 6. Технические характеристики контроллера NIPXIe-8133 позволяют гарантировать то, что время протекания всех процессов в модели и сами процессы будут полностью соответствовать реальному объекту. Влияние помех, возникающих в каналах связи вычислительного комплекса с реальным объектом, учитывалось
спомощью генератора случайных чисел
снормальным законом распределения.
Спомощью HIL-моделирования программный комплекс SMTest был протестирован на моделях машин серии СТД в диапазоне мощностей от 320 кВт до 12,5 МВт. В качестве примера на рис. 7 приведена характеристика холостого хода, полученная с модели синхронного двигателя СТД-800-2 (мощностью 800 кВт).
255

Рис. 6. Структурная схема программноаппаратного комплекса
Рис 7. Характеристика холостого хода, снятая с модели двигателя СТД-800-2
Анализ результатов исследования показал, что при достижении в каналах связи уровня помех 30 % от полезного сигнала отклонение в идентификации параметров испытуемой машины не превышает 6 %.
Заключение. Разработанный программный комплекс SMTest является совершенно новым программным продуктом, реализованным в современной среде графического программирования LabVIEW и рассчитанным на использование современных аппаратных средств фирмы National Instruments. Структура комплекса и его функции определены таким образом, что они не противоречат требованиям отечественных и зарубежных стандартов, в то же время обеспечивают комплексность автоматизации
256
процесса испытаний и достоверность получения результатов испытаний синхронных машин средней и большой мощности.
Разработка и внедрение мобильных и стационарных испытательно-диагно- стических станций, на которых будет установлен комплекс SMTest, позволит:
−увеличить производительность испытаний за счет сокращения времени снятия характеристик и экспресс-обра- ботки результатов испытаний;
−увеличить точность и достоверность испытаний за счет использования более точных методов и алгоритмов и исключения в результатах субъективных ошибок;
−автоматически формировать отчет
орезультатах испытаний конкретной марки машины;
−создавать архив результатов испытаний всех испытанных марок машин;
−построить автоматизированную систему управления качеством производства синхронных машин
Работа выполняется по гранту Российского фонда фундаментальных исследований на 2014–16 гг., проект № 14-07-00104 «Разработка мобильной испытательно-диагностической станции электрических машин переменного тока», руководитель проекта – Э.В. Любимов. На ранних стадиях в работе принимали участие студенты-диплом- ники специальности «Электромеханика» кафедры «Электротехника и электромеханика» М.Э. Юшков и Е.А. Матвеев.
Список литературы
1. ГОСТ Р 52776–2007. Машины электрические вращающиеся. Номинальные данные и характеристики (введ. 31.10.2007). – М.: Стандартинформ, 2008. – 69 с.
2. ГОСТ 10169–77. Машины элек- |
9. Исцелемов Д.А., Любимов Э.В., |
|||
трические трехфазные синхронные. Ме- |
Беляев Н.А. Виртуальный прибор для |
|||
тоды испытаний (введ. 01.01.1978). – М.: |
определения основных параметров сину- |
|||
Изд-во стандартов, 1984. – 82 с. |
соидальных сигналов |
в стационарных |
||
3. IEC |
60034-4. Rotating electrical |
режимах // Электротехника. − 2013. − |
||
machines. Part 4: Methods for determining |
№ 11. − С. 32–35. |
|
||
synchronous machine quantities from tests. |
10. Виртуальный прибор для опре- |
|||
Edition 3.0. 2008–05. Geneve: IEC Central |
деления |
параметров |
синусоидальных |
|
Office, 2008. – 158 р. |
сигналов «Angle.vi»: св-во о гос. регист- |
|||
4. IEC 60034-2-2. Rotating electrical |
рации программ для ЭВМ / Д.А. Исце- |
|||
machines. Part 2-2: Specific methods for |
лемов, Э.В. Любимов; правооблада- |
|||
determining separate losses of large ma- |
тель Перм. нац. иссслед. техн. ун-т. |
|||
chines from tests – Supplement for IEC |
№ 2015611189 от 26.01.2015. |
|||
60034-2-1. Edition 1.0. 2010–03. Geneve: |
11. Виртуальный прибор для опре- |
|||
IEC Central Office, 2010. – 56 р. |
деления |
огибающих |
синусоидальных |
|
5. C50.12–2005 – IEEE standard for |
сигналов в стационарных и нестацио- |
|||
salient-pole 50 Hz and 60 Hz synchronous |
нарных режимах» («OVKZ.vi»): св-во о |
|||
generators and generator/motors for hydrau- |
гос. регистрации программ для ЭВМ / |
|||
lic turbine applications rated 5 MVA and |
Д.А. Исцелемов, Э.В. Любимов; право- |
|||
above. 2006–02–15. – New York: IEEE, |
обладатель Перм. нац. иссслед. техн. |
|||
2006. – 45 p. |
|
ун-т. № 2015616305 от 05.06.2015. |
||
6. C50.13–2005. IEEE standard for cy- |
12. Программный комплекс для ав- |
|||
lindrical-rotor 50 Hz and 60 Hz synchronous |
томатизации испытаний синхронных не- |
|||
generators rated 10 MVA and above. 2005– |
явнополюсных машин» (SMTest.exe): св- |
|||
12–29. – New York: IEEE, 2005. – 60 p. |
во о гос. регистрации программ для |
|||
12.115–2009. IEEE Guide for Test |
ЭВМ / Д.А. Исцелемов, Э.В. Любимов; |
|||
Procedures for Synchronous Machines. Part |
правообладатели: Перм. нац. иссслед. |
|||
I. Acceptance and Performance Testing. Part |
техн. ун-т, Д.А. Исцелемов, Э.В. Люби- |
|||
II. Test Procedures and Parameter De- |
мов. № 2015660820 от 09.10.2015. |
|||
termination for Dynamic Analysis. 2010– |
13. Исцелемов Д.А., Любимов Э.В. |
|||
05–07. – New York: IEEE, 2010. – 224 p. |
Метод форсировки возбуждения для со- |
|||
7. Software for testing alternators of |
кращения времени снятия характеристик |
|||
heavy-duty trucks and cars / E. Lyubimov |
испытуемых синхронных машин // Элек- |
|||
[et al.] // SAE World Congress 2012. − De- |
тротехника. − 2014. − № 11. − С. 2–7. |
|||
troit, 2012. − 2012-01-0022.−1. |
14. Демонстрационный стенд мо- |
|||
8. Любимов Э.В., Исцелемов Д.А., |
бильной испытательной станции элек- |
|||
Караневский С.Л. Метод скользящей |
трических машин переменного тока / |
|||
тригонометрической аппроксимации для |
Э.В. Любимов, Н.А. Беляев, Д.А. Исце- |
|||
определения |
основных параметров и |
лемов, М.Э. Юшков, Е.А. Матвеев // |
||
огибающих |
синусоидальных сигналов |
Энергетика. Инновационные направле- |
||
в установившихся и переходных режи- |
ния в |
энергетике. |
CALS-технологии |
|
мах [Электронный ресурс] // Современ- |
в энергетике: материалы VI Междунар. |
|||
ные проблемы науки и образования. – |
науч.-техн. интернет-конф., Пермь, |
|||
2014. – № 5. – URL: http://www.science- |
1–30 ноября 2012 г. – Пермь: Изд-во |
|||
education.ru/119-14976 (дата обращения: |
Перм. нац. исслед. политехн. ун-та, |
|||
15.11.2014). |
|
2012. – С. 193–204. |
|
|
257
УДК 621.313(075.8)
УДЕЛЬНАЯ ТАНГЕНЦИАЛЬНАЯ СОСТАВЛЯЮЩАЯ УСИЛИЯ ЭЛЕКТРОМАГНИТНОГО ПОЛЯ В РАБОЧЕМ ЗАЗОРЕ СИНХРОННОГО ДВИГАТЕЛЯ С КОЛЬЦЕВЫМИ ОБМОТКАМИ
И.В. Малыгин, А.Т. Пластун
Уральский федеральный университет имени первого Президента России Б.Н. Ельцина, Екатеринбург
Проведена оценка эффективности синхронного двигателя с кольцевыми обмотками методом расчета удельного окружного усилия и сравнения данного показателя с аналогичным значением серийного синхронного двигателя той же мощности. Приведены угловые характеристики обоих двигателей, рассчитанные в пакете ANSYS. Показано, что синхронный двигатель с кольцевыми обмотками уступает синхронному двигателю классической конструкции по удельному окружному усилию на 3,8 %.
Ключевые слова: синхронный двигатель, удельное окружное усилие, ANSYS.
SPECIFIC PERIPHERAL COMPONENT OF SINCHRONOUS MOTOR WITH RING WINDINGS AIR-GAP ELECTROMAGNET FORCE
I.V. Malygin, A.T. Plastun
Ural Federal University named after the first President of Russia Boris Yeltsin, Ekaterinburg
Synchronous motor with ring windings efficiency evaluation has been carried out with specific peripheral force calculation and comparison of this value with the same value of equal power serial synchronous motor. Torque-angle curves for both motors, calculated using ANSYS, are presented. It is shown that synchronous motor with ring windings specific peripheral force is 3,8 % less than serial synchronous motor specific peripheral force.
Keywords: synchronous motor, specific peripheral force, ANSYS.
На кафедре ЭМ в течение ряда по- |
ваемой конструкции является увеличен- |
||||
следних лет разрабатывается конструк- |
ная длина якоря по отношению к длине |
||||
ция якоря синхронного двигателя с |
ротора. Третьей особенностью является |
||||
кольцевыми обмотками – СДКО, пред- |
то, что якорная обмотка и магнитная |
||||
назначенная для работы в энергонасы- |
система выполнены таким образом, что |
||||
щенных силовых полях (в радиационных |
при минимально возможном числе ка- |
||||
и высокотемпературных зонах)1 [1]. От- |
тушек, равном шести, позволяют органи- |
||||
личительная особенность конструкции |
зовать любое число пар полюсов2. |
||||
якорной обмотки синхронного двигателя |
Одним из критериев оценки эффек- |
||||
состоит в том, что все катушки обмотки |
тивности использования объема элек- |
||||
имеют равные геометрические размеры |
тромагнитного ядра электромеханиче- |
||||
и геометрические оси катушек совпада- |
ского преобразователя энергии является |
||||
ют друг с другом и совпадают с осью |
удельная тангенциальная составляющая |
||||
вращения вала ротора, что в конечном |
усилия электромагнитного поля в рабо- |
||||
итоге приводит к необходимости выпол- |
чем зазоре при условии равенства ли- |
||||
нять магнитную систему несимметрич- |
нейных нагрузок и индукции при срав- |
||||
ной. Второй особенностью разрабаты- |
нении |
разрабатываемой конструкции с |
|||
|
|
якорем |
электромеханического преобра- |
||
|
|
|
|
|
|
1 Пат. 2121207 Рос. Федерация / Плас- |
|
|
|
||
2 Там же. |
|||||
тун А.Т. 1996. |
|||||
258
зователя классического исполнения. Таким образом, оценить эффективность якоря синхронного двигателя с кольцевыми обмотками можно, например, рассчитав удельную тангенциальную составляющую усилия электромагнитного поля, полученного путем моделирования данной конструкции в среде ANSYS.
Известно, что главными размерами электрической машины называются внутренний диаметр статора и его длина. При этом D – внутренний диаметр магнитной системы якоря, а l – длина магнитной системы якоря. В магнитной системе якоря с кольцевыми обмотками длина магнитной системы якоря примерно в 1,25 раза больше длины магнитной системы ротора. Далее под l будем понимать длину магнитной системы ротора.
Основные геометрические размеры электрической машины, такие как внутренний диаметр статора и длина воздушного зазора между статором и ротором, а также ее мощность, скорость вращения и электромагнитные «нагрузки» связаны выражением
l D2n |
|
6,1 1011 |
|
|
δ |
= |
|
= CA. |
(1) |
P′ |
|
|||
|
αδkBk0 ABδ |
|
||
Величина СА называется «машинной постоянной» Арнольда. Обратная величина 1/CA = KA называется коэффициентом использования машины (или коэффициентом Эссона) [2].
Если преобразовать формулу «машинной постоянной» к следующему виду:
|
|
|
|
|
l D2 |
|
60 |
|
l D2 |
|
|
||
|
|
CA = |
δ |
|
= |
|
|
δ |
, |
(2) |
|||
|
|
P′/ n |
2π |
M ′ |
|||||||||
|
|
|
|
|
|
|
|
|
|||||
где |
M ′ = |
P′ |
= |
60 |
P′ |
– расчетный |
вра- |
||||||
ω |
n |
||||||||||||
|
|
|
2π |
|
|
|
|
|
|
||||
щающий момент, то можно видеть, что CA определяет «объемный» расход материалов на единицу расчетного момента.
Следовательно, KA определяет расчетный момент на единицу объема.
О степени использования активных материалов можно судить по удельной
тангенциальной составляющей усилия
(кН/м2)
σ = |
F′ |
= |
|
M ′ |
= |
60 |
|
P′ |
, (3) |
|
πlδD |
D |
πlδD |
π2 |
lδD2n |
||||||
|
|
|
|
|
||||||
|
|
|
2 |
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
где P′ – расчетная мощность машины (кВт – для машин постоянного тока; кВА – для машин переменного тока); D и lδ – внутренний диаметр и длина статора, м. Очевидно, что σKA =1/ CA [3].
Проанализировав изложенное, можно сделать вывод о том, что удельная тангенциальная составляющая усилия может выступать в роли критерия так называемого правильного проектирования машины. Этот критерий показывает, насколько грамотно спроектирована машина с точки зрения затраченных материалов (объема электромагнитного ядра) и получаемой из них максимальной силы.
Покажем это на примере расчета удельной тангенциальной составляющей усилия для синхронных двигателей различной мощности (таблица).
Удельные окружные усилия различных машин находятся примерно на одном уровне, причем независимо от их режима работы, вида возбуждения и мощности. В некоторых случаях у машин малой мощности удельное окружное усилие даже выше, чем у машин большой мощности.
Приведенный подход к оценке эффективности использования материалов справедлив для любых синхронных машин классического исполнения. Таким образом, данный подход можно применить для оценки эффективности использования материалов к машине неклассического исполнения – синхронному двигателю с кольцевыми обмотками.
259

Удельные тангенциальные усилия синхронных машин
Тип машины |
|
P2, кВт |
|
n, об/мин |
|
lδ, мм |
|
D, мм |
|
σ, кН/м2 |
Синхронные генераторы с возбуждением от постоянных магнитов |
|
|||||||||
Генератор ветряной э/с FD-5.0 |
|
0,5 |
|
600 |
|
55 |
|
95 |
|
10,21 |
Генератор ветряной э/с FD-2.7-500 |
|
0,5 |
|
600 |
|
37 |
|
149 |
|
6,17 |
Генератор ветряной э/с FD-2000 |
|
2,0 |
|
428 |
|
105 |
|
145 |
|
12,87 |
Генератор ветряной э/с FD-5000 |
|
5,0 |
|
375 |
|
160 |
|
180 |
|
15,64 |
Генератор холодильной установки |
|
|
|
|
|
|
|
|
|
9,91 |
Carrier transicold |
|
23,0 |
|
1500 |
|
120 |
|
280 |
|
|
|
|
|
|
|
|
|
|
|
|
|
Синхронные генераторы с электромагнитным возбуждением до 30 кВт |
|
|||||||||
Генератор ветряной э/с |
|
1,0 |
|
500 |
|
62 |
|
122 |
|
13,18 |
|
|
|
|
|
||||||
FD3.0-500-7F |
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Генератор ветряной э/с |
|
3,0 |
|
3000 |
|
126 |
|
80 |
|
7,54 |
FD5.0-3000-16 |
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Генератор ветряной э/с |
|
5,0 |
|
3000 |
|
105 |
|
105 |
|
8,75 |
FD6.4-5000-16 |
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
Генератор электростанции EK2LAT |
|
7,0 |
|
3000 |
|
96 |
|
106 |
|
13,15 |
Генератор дизельной электростанции |
|
|
|
|
|
|
|
|
|
14,46 |
RKraft HHC38 |
|
30,0 |
|
1500 |
|
233 |
|
190 |
|
|
Синхронные генераторы с электромагнитным возбуждением до 100 кВт |
||||||||||
БГ-30 |
|
30,0 |
|
1500 |
|
207 |
|
235 |
|
10,64 |
БГ-60 |
|
60,0 |
|
1500 |
|
236 |
|
282 |
|
12,96 |
БГ-100 |
|
100,0 |
|
1500 |
|
280 |
|
314,2 |
|
14,66 |
Синхронные двигатели |
|
|
|
|
|
|
||||
СД-12-42-4 |
|
500,0 |
|
1500 |
|
420 |
|
575 |
|
14,59 |
СД-12-52-4 |
|
630,0 |
|
1500 |
|
520 |
|
575 |
|
14,85 |
СД-13-46-4 |
|
800,0 |
|
1500 |
|
460 |
|
670 |
|
15,70 |
Для расчета значения удельного тангенциального усилия синхронного двигателя с кольцевыми обмотками использовалась математическая модель, реализованная и рассчитанная в пакете ANSYS [2]. В качестве ротора синхронного двигателя с кольцевыми обмотками принят ротор синхронного двигателя мощностью 16 кВт.
С целью проверки правильности выполнения расчета в той же среде был произведен расчет синхронного двигателя классического исполнения мощностью 16 кВт с таким же ротором. Для двигателя классического исполнения было определено значение удельного
тангенциального усилия, которое было сопоставлено со значениями удельных окружных усилий, приведенных выше.
В процессе расчета для обоих двигателей были получены угловые характеристики тангенциальных составляющих электромагнитных сил, действующих между полюсом и статором, из которых определялся максимум этих составляющих и проводился расчет удельной тангенциальной составляющей усилия электромагнитного поля для каждого двигателя (рис. 1, 2).
260