

Теория определяющих соотношений. Часть 2. Теория пластичности
.pdfгим образом, C0  . При продолжающемся нагружении в положительном направлении оси S2 ИТН «захватывает» поверхность f0 и движется вместе с ней до достижении точки F1 ; пластическое деформирование на участке F0 F1 осуществляется с модулем пластичности C1 . До достижения точки F1 все поверхности f1,f2 ,...,fn остаются неподвижными. При достижении ИТН точки F1 и продолжающемся лучевом нагружении уже две поверхности, f0 и f1 , движутся вместе с ИТН поступательно прямолинейно вплоть до точки F2 . Деформирование на участке F1F2 осуществляется с пластическим модулем C2 , окружности f2 ,f3 ,...,fn остаются неподвижными. Аналогичным образом
. При продолжающемся нагружении в положительном направлении оси S2 ИТН «захватывает» поверхность f0 и движется вместе с ней до достижении точки F1 ; пластическое деформирование на участке F0 F1 осуществляется с модулем пластичности C1 . До достижения точки F1 все поверхности f1,f2 ,...,fn остаются неподвижными. При достижении ИТН точки F1 и продолжающемся лучевом нагружении уже две поверхности, f0 и f1 , движутся вместе с ИТН поступательно прямолинейно вплоть до точки F2 . Деформирование на участке F1F2 осуществляется с пластическим модулем C2 , окружности f2 ,f3 ,...,fn остаются неподвижными. Аналогичным образом
можно описать последующее активное лучевое нагружение. На рис. 6.3, б изображено положение поверхностей, соответствующее достижению ИТН точки F3 .
Пусть начиная с этого момента осуществляется процесс разгрузки и нагружения в обратном направлении. При движении ИТН от точки F3 до точки
R0 (рис. 6.3, б) материал деформируется упруго, точке R0 соответствует на-
чало пластического деформирования в обратном направлении. Начиная с точки R0 , ИТН движется в отрицательном направлении оси S2 вместе с по-
верхностью f0 вплоть до касания окружности f1 в точке R1 . На этом этапе деформирования все остальные поверхности f1,f2 ,...,fn сохраняют положение, занимаемое ими в конце предыдущего участка активного нагружения. После достижения ИТН положения R1 дальнейшее деформирование до положения R 2 сопровождается совместным перемещением поверхностей f0 , f1 при неподвижных поверхностях f2 ,f3 ,...,fn ; деформирование на участке R1R2 осуществляется с пластическим модулем C2 . На рис. 6.3, в изображено положение поверхностей в момент достижения ИТН положения R 3 .
При формулировке определяющего соотношения полагается справедливым принцип градиентальности, причем при определении градиента используется последняя из поверхностей нагружения fk, вовлеченная в трансляцию в пространстве напряжений вместе с ИТН, и соответствующий ей пластический модуль C k+1.
|
Тогда получаем (опуская индекс) |
|
|
|
|
|
|
|
|
|
||||||||||||||
|
|
|
|
|
|
|
dep |
|
1 |
nf |
(dS : nf ) |
|
1 |
dσf nf , |
|
|
(6.9) |
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
C |
|
|
|
|
|
C |
|
|
|
|
|
|
||
где |
n |
|
|
f |
S |
|
– направляющий (единичный по модулю) |
тензор внешней |
||||||||||||||||
f |
f |
|
||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
S |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
нормали к f; |
|
|
f |
|
f |
: f |
2 |
|
– модуль тензора f |
S |
; |
dσ |
|
dS : n |
|
|||||||||
|
|
|
|
|
|
|
S |
|
|
|
S |
|
S |
|
|
|
|
|
f |
|
f |
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
– проекция бесконечно малого приращения девиатора напряжений на еди-
211
ничную нормаль к активной поверхности нагружения f; C – модуль упрочнения, являющийся обобщением тангенциального модуля, используемого в случае одноосного нагружения. Отметим, что в силу пропорциональности
|
p |
|
|
|
|
|
|
|
|
|
|
|
dep |
|
|
|
||
тензоров nf и de |
|
направляющий тензор можно определить как nf |
|
de |
p |
|
. |
|||||||||||
|
|
|
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Тогда, как нетрудно видеть: |
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
C |
|
|
dσ |
f |
|
dS : n |
f |
|
dS : dep |
|
dS : dep |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
. |
(6.10) |
|
|
|
|
|
|||
|
|
dεp |
|
dεp |
|
|
(dεp )2 |
|
(dep : dep ) |
|
|
|
|
|
||||
Обратимся теперь к описанию нагружения, отличающегося от пропор- |
||||||||||||||||||
ционального. Как и ранее, полагается, что поверхности fi ,i |
0,.., n , |
могут |
||||||||||||||||
перемещаться только поступательно, могут только касаться друг друга, последовательно вовлекая в движение поверхности с большими номерами. На любом участке активного пластического деформирования все предшествующие поверхности нагружения, «захваченные» при движении ИТН, касаются друг друга в точке текущего положения ИТН.
Рассмотрим случай, когда после нагружения до точки F3 (см. рис. 6.3б)) произошла частичная разгрузка до положения R0 ' , а затем осуществляется нагружение по лучу R0 ' R0 ' ' R1 ' R2 ' R3 ' R4 ' , параллельному оси S1 (рис. 6.4). После достижения ИТН положения R0 ' ' и продолжающегося нагружения вдоль R0 ' ' R4 ' поверхность f0 не может перемещаться ни вдоль единичной нормали n0 в точке R0 ' ' , ни вдоль луча R0 ' ' R4 ' , поскольку в этом случае она будет пересекать другие поверхности, что недопустимо. Конечная трансляция, приводящая к касанию окружностей f0 и f1 в точке R0 ' ' , расположенной на f0 , может быть осуществлена поступательным перемещением f0 на вектор R0''A1 , где A1 определяет положение внешней нормали n10 на поверхности f1 , совпадающей с n0 . Однако при этом будет нарушено другое условие: точка A1 не является местом расположения ИТН, поскольку траектория нагружения задана и определяется лучом R0 ' R4 ' . В связи с этим используется следующая схема: мгновенное перемещение поверхности f0 осуществляется вдоль R0''A1 , однако ИТН остается на поверхности f0 . Тогда
после бесконечно малого смещения поверхности f0 вдоль R0''A1 определяется новое положение R0 ' ' на поверхности f0 , одновременно принадлежащее лучу R0 ' R4 ' . Из рассмотрения рис.6.4 нетрудно видеть, что при этом угол между n0 и осью OS2 уменьшится. После этого определяется новое положение точки A1 , причем в силу вышесказанного угол F3O1A1 уменьшается на то же значение, на которое уменьшится угол F3O0R0 '' . В ходе бесконечно малых шагов происходит постепенное сближение положения R0 ' ' ИТН на f0 и соответствующей точки A1 на f1 . При этом точка R0 ' ' все время будет
212

оставаться на луче R0 ' R4 ' , в силу чего положение точки A1 на f1 будет при-
ближаться к указанному лучу. В конечном счете при переходе ИТН в положение R1 ' поверхности f0 и f1 будут касаться друг друга в этой точке.
Перейдем к математическому описанию движения поверхностей нагружения. Для этого достаточно рассмотреть процесс перемещения одной из поверхностей (например, fl ) до касания с поверхностью следующего уровня (
fl 1 , рис.6.5). Действительно, все поверхности с последующими номерами остаются неподвижными ( fl 1,fl 2 ,..,fn ).
Рис.6.4. Иллюстрация к модели З.Мруза (случай сложного нагружения в двумерном пространстве напряжений)
Описание движения ранее «захваченных» поверхностей ( f0 ,...,fl 1 ) мо-
жет быть осуществлено аналогично рассматриваемому случаю (напомним, что при активном нагружении все они должны касаться друг друга и поверхности fl в месте текущего положения ИТН). Ниже будет показано, что
положение поверхностей f0 ,...,fl 1 может быть установлено простыми соот-
ношениями. При этом отсутствует необходимость определения их положения в каждый момент нагружения, достаточно устанавливать их в момент начала разгрузки; при активном нагружении в соотношениях используются характеристики только последней из вовлеченных в движение поверхностей (в данном случае – fl ).
Рассматриваются две подобные поверхности нагружения fl и fl 1 , положение которых определяется центрами Ol и Ol 1 соответственно, устанавливаемые, в свою очередь, девиаторами остаточных микронапряжений ρl и
213
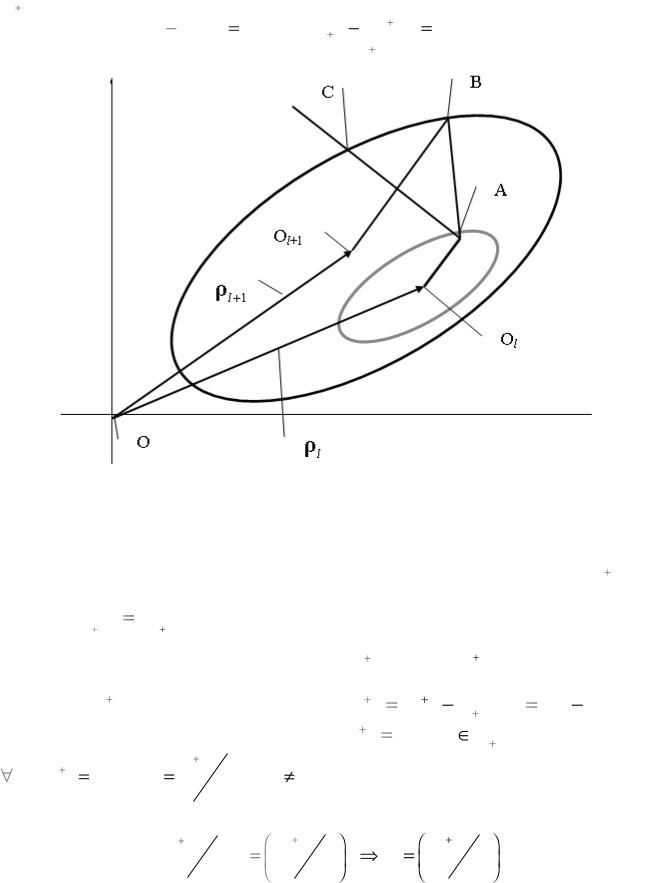
ρl 1 (рис. 6.5). Поверхности нагружения описываются уравнениями
f (S - ρ ) |
(σ(l ) )q |
0, f (S - ρ |
) |
(σ(l 1) )q |
0, |
(6.11) |
l |
0 |
l 1 |
|
0 |
|
|
где f – однородная функция порядка q, σ(0l ) ,σ(0l 1) – постоянные.
Рис. 6.5. Схема к описанию движения поверхностей текучести
Пусть изображающая точка лежит на поверхности fl в положении A, нагружение осуществляется вдоль луча AC. Тогда мгновенное перемещение поверхности fl осуществляется вдоль AB, где B – точка на поверхности fl 1 , имеющая одинаковое направление внешней нормали с внешней нормалью в
точке A, nf |
l 1 |
|
|
n f |
l 1 |
|
. Положение точки B для подобных поверхностей оп- |
|
|
B |
|
|
A |
||
|
|
|
|
ределяется пересечением с поверхностью fl 1 прямой Ol 1B, параллельной Ol A . Обозначим девиаторы напряжений в точках A и B соответственно че-
рез |
S(l) и |
S(l 1) . Тогда, вводя обозначения t(l 1) |
|
S(l 1) ρ |
l 1 |
, t(l ) |
S(l ) |
ρ |
, в |
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
l |
|
|
силу |
вышесказанного |
получаем |
|
t(l |
1) |
k t(l ) , k |
R , |
|
так |
что |
||||||||
|
(l 1) |
(l ) |
|
tij(l 1) |
t(l ) , |
(l ) |
|
|
|
|
|
|
|
|
|
|
|
|
i, j |
tij |
k tij |
, k |
|
tij |
0 . Вследствие однородности функции f |
||||||||||||
|
|
|
|
|
ij |
|
|
|
|
|
|
|
|
|
|
|
|
|
(порядка q) из (6.11) |
получаем |
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
f (t(l 1) ) |
|
σ0(l 1) |
|
q |
|
|
σ(0l 1) |
|
q |
|
|
|
|
||
|
|
|
|
|
, |
k |
q |
|
|
, |
|
|
|
|||||
|
|
|
|
f (t(l ) ) |
|
|
σ(l ) |
|
σ(l ) |
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
0 |
|
|
|
|
0 |
|
|
|
|
|
откуда следует
214
|
|
S |
(l 1) |
|
ρl 1 |
|
σ0(l 1) |
S |
(l ) |
|
ρl . |
|
|
|
(6.12) |
|||||
|
|
|
|
|
|
σ(l ) |
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
0 |
|
|
|
|
|
|
|
|
|
|
|
Перемещение поверхности fl |
в текущий момент времени на бесконечно |
|||||||||||||||||||
малое расстояние осуществляется вдоль тензора |
S(l 1) S(l) . Как следует из |
|||||||||||||||||||
(6.12), |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
S |
(l 1) |
S |
(l ) |
ρl 1 |
|
σ0(l 1) |
|
S |
(l ) |
ρl |
|
S |
(l ) |
|||||||
|
|
|
|
|
|
σ(l ) |
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
0 |
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
σ(l 1) |
σ(l ) |
S(l ) |
|
|
ρ |
|
σ(l ) |
|
ρ |
σ(l 1) . |
|||||
|
|
|
|
|
|
|
|
|
||||||||||||
|
σ(l ) |
0 |
0 |
|
|
|
|
|
|
l 1 0 |
|
l |
0 |
|
||||||
|
|
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Тогда dρl можно определить следующим образом:
dρ |
|
dμ |
σ(l 1) |
σ(l ) |
S(l ) |
ρ |
σ(l ) |
ρ |
σ(l 1) |
, |
(6.13) |
|
|
||||||||||
|
σ(l ) |
||||||||||
|
l |
0 |
0 |
|
|
l 1 0 |
l |
0 |
|
|
|
|
|
0 |
|
|
|
|
|
|
|
|
|
где dμ – скалярный множитель, характеризующий величину смещения. В ча-
стности, когда центры поверхностей fl |
и fl 1 |
совпадают, ρl |
ρl 1 , из (6.13) |
|||||
следует |
|
|
|
|
|
|
|
|
dρ |
|
dμ |
σ(l 1) |
σ(l ) |
S(l ) ρ |
|
, |
(6.14) |
|
|
|
||||||
|
σ(l ) |
|
||||||
|
l |
0 |
0 |
|
l |
|
|
|
|
|
0 |
|
|
|
|
|
|
т.е. в этом случае мгновенная трансляция осуществляется вдоль Ol A . Отме-
тим, что в этом частном случае закон трансляции (6.14) совпадает с предложенным Г. Циглером (1959г.) законом для определения остаточных микронапряжений при произвольном нагружении с использованием одноповерхностной теории пластического течения:
dρ dμ S ρ .
Таким образом, в этом законе полагается, что смещение поверхности текучести осуществляется вдоль направления, связывающего центр поверхности текучести и ИТН.
Как уже отмечалось ранее, движение ИТН задано условиями нагружения. Для рассматриваемого случая, например, ИТН должна находиться на прямой AC, не покидая при этом поверхность нагружения fl . Иначе говоря, t ИТН участвует одновременно в двух мгновенных движениях – определяемом собственно нагружением ( dS ) и движением поверхности fl ( dρl ). По
аналогии с кинематикой сложного движения точки, рассматривая последнее как «переносное» движение, первое – как «абсолютное», для сохранения по-
ложения ИТН на поверхности |
fl следует потребовать, |
чтобы мгновенное |
||||
«относительное» движение |
dS |
dρl |
|
осуществлялось по касательной к по- |
||
верхности fl . Данное условие можно записать в виде |
|
|||||
dS |
dρl : |
|
fl |
0 . |
(6.15) |
|
|
S |
|||||
|
|
|
|
|
|
|
215 |
|
|
|
|
|
|
Соотношение (6.15) используется для определения скалярного множителя d . Для этого запишем вначале (6.13) в виде:
|
|
|
|
|
|
|
|
|
|
|
dρ |
l |
dμ S(l 1) |
S(l ) . |
(6.16) |
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
С учетом (6.16) из (6.15) получаем |
|
|
|
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
fl |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
: dS |
|
|
dσfl |
|
|||
|
|
|
|
dμ |
|
|
|
|
|
S |
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
ρ |
|
, |
(6.17) |
|||||
|
|
|
|
|
fl |
|
: S(l 1) |
S(l ) |
|
nfl : S(l 1) S(l ) |
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
S |
|
|
|
|
|
|
|
|
|
|||
где dσf |
l |
nf |
l |
: dS , |
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
nfl |
fl |
/ S |
|
|
|
|
– направляющий тензор внешней нормали к fl в |
||||||||||||
|
|
|
fl |
/ |
S |
|
|||||||||||||
точке S(l ) . |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
Все поверхности f0 ,f1,...,fl 1 |
в процессе активного нагружения должны |
||||||||||||||||||
оставаться в контакте с поверхностью fl , причем общая точка контакта совпадает с текущим положением ИТН. Очевидно, что данное обстоятельство обусловливает смещение поверхностей f0 , f1 ,..., fl 1 относительно fl .
Отметим, что положение внутренних поверхностей f0 ,f1,...,fl 1 относительно fl при активном нагружении определяется в каждый момент процесса
простыми соотношениями. Действительно, в силу подобия поверхностей нагружения и в силу их выпуклости нетрудно заметить, что центры поверхностей f0 ,f1,...,fl 1 расположены на прямой Ol A . Данный факт следует из того,
что для выпуклой и гладкой поверхности ориентация внешней нормали полностью и однозначно определяется положением точки на поверхности, т.е.
тензором S(k ) ρk для любой поверхности fk . Поскольку в точке касания внешние нормали касающихся поверхностей fk и fm должны совпадать, а сами подобные поверхности движутся относительно друг друга поступательно, то тензоры S(k ) ρk , S(m) ρm должны быть пропорциональны. В векторном пространстве напряжений это означает, что соответствующие векто-
ры |
(k ) |
|
, |
|
(m) |
|
|
|
должны быть коллинеарны. В случае, если |
||||
k |
|
|
|
|
m |
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
||
поверхности f |
k |
и f |
m |
имеют общую точку касания, т.е. (k ) |
(m) , это оз- |
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
||
начает, что векторы |
|
(k ) |
|
|
и |
(m) |
|
направлены вдоль одной |
|||||
|
|
|
k |
|
m |
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
||
прямой, что и требовалось показать. Заметим, что в случае не строго выпуклых поверхностей (например, для поверхностей Треска–Сен-Венана) данное свойство также сохраняется, что следует из процедуры построения конфигурации семейства поверхностей нагружения.
Из приведенного свойства следует, что положение центра Ol 1 поверхности fl 1 , касающейся поверхности fl в точке S(l ) , может быть определено
216

соотношением
S |
(l ) |
ρl |
σ0(l ) |
S |
(l ) |
ρl 1 . |
(6.18) |
|
|
σ(l |
1) |
|
|||||
|
|
|
|
|
|
|
||
|
|
|
0 |
|
|
|
|
|
После достижения ИТН положения C на поверхности fl 1 (рис. 6.5) по- |
||||||||
следняя вовлекается в |
совместное |
движение вместе |
с поверхностями |
|||||
f0 ,f1,...,fl . При этом общая точка контакта находится постоянно в месте расположения ИТН и все центры O0 ,O1,...,Ol 1 расположены на одной прямой, соединяющей положение ИТН с центром Ol 1 .
Отметим, что все указанные выше положения и соотношения сохраняются в любом подпространстве пространства (5) . При этом, если нагружение осуществляется таким образом, что ненулевыми будут только некоторые компоненты девиатора S , то отличными от нуля будут только соответст-
вующие компоненты девиатора остаточных микронапряжений ρi , i 0, n всех поверхностей f0 ,...,fn .
Предполагаемая модель может быть обобщена на случай изменения
|
|
|
|
размера поверхностей нагружения |
σ(k ) , k 0, n , без существенных измене- |
||
|
0 |
|
|
ний структуры и соотношений. Из экспериментов известно, что в процессе нагружения поверхность f0 может уменьшаться по размерам, тогда как ос-
тальные поверхности |
f1 ,...,fn испытывают, как правило, расширение. То |
|||
есть можно принять, |
что |
σ(k ) являются не постоянными, а некоторыми |
||
|
|
0 |
|
|
функциями параметра s, σ(k ) |
σ(k ) (s), k 0, n . Для определения этой зави- |
|||
|
0 |
0 |
|
|
симости используются эксперименты на циклическое нагружение. Последующее развитие многоповерхностной теории течения связано в
значительной мере с различными модификациями предложенной З.Мрузом модели. «Центр тяжести» исследований лежит в установлении законов перемещения поверхностей нагружения, их числа и размеров. При определении числа поверхностей возникают два предельных случая: n 2 и n . Наиболее широко применяемыми в последние 10–20 лет является двухповерхностные модификации модели Мруза. Особенно часто они используются для описания сложного (непропорционального) циклического нагружения. Остановимся вкратце на моделях данного типа.
В этом случае вводится поверхность f0 , отделяющая область упругого
деформирования от пластической зоны и называемая разными авторами
внутренней поверхностью, поверхностью текучести или поверхностью нагружения. Поверхность f0 в течение всего процесса нагружения не может
выходить за границы поверхности f1 , называемой внешней поверхностью,
граничной поверхностью или предельной поверхностью. Далее для f0 бу-
дем использовать термин «поверхность текучести», а для f1 – «предельная поверхность». Если в процессе активного нагружения ИТН находится в по-
217
ложении A на поверхности f0 |
с единичной внешней нормалью nfA , то точку |
|
0 |
A' на поверхности f1 , имеющую одинаковую единичную внешнюю нормаль,
т.е. nfA' |
nfA , будем называть соответствующей или сопряженной точке A. |
1 |
0 |
Одну из первых двухповерхностных теорий предложили Я.Дафалиас и Е. Попов (1975). Система уравнений, определяющих пластическое деформирование, движение и изменение размеров поверхности текучести и предельной поверхности имеет вид
|
f0 |
S |
ρ 0,R0 (s) |
0, |
f1 |
S |
ρ 1,R1(s) |
0 , |
(6.19) |
||||||
|
|
|
|
R0 (s) |
dep |
S |
ρ0 , |
|
|
|
|
(6.20) |
|||
|
|
|
|
ds |
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
S' |
ρ1 |
|
S ρ0 |
, |
S' |
S |
m |
|
dρ1 |
m |
|
dρ0 |
. |
(6.21) |
|
|
|
|
|
|
|
|
||||||||
|
R1 |
|
R0 |
|
|
1 |
|
ds |
|
2 |
ds |
|
|||
Здесь S' определяет сопряженную точку на поверхности f1 . |
|
||||||||||||||
Отметим, что R0 (s) и R1 (s) , константы материала m1 |
и m2 , определя- |
||||||||||||||
ются из экспериментов (вообще говоря, при сложном циклическом нагружении). При формулировке теории авторы сознательно оставили незамкнутой систему соотношений (6.21) для определения S',ρ0 ,ρ1 , что позволяет в ши-
роких пределах варьировать законы изменения поверхностей f0 и f1 . Так,
Ченгом и Ли (1983) предложена следующая конкретизация предлагаемых соотношений:
ρ1 |
0, |
|
|
|
dρ0 |
|
|
dS |
(6.22) |
|
n1ρ0 n |
|
|
n3S. |
ds |
2 ds |
|||
Более общий случай конкретизации соотношений (6.21) приведен в ра-
боте [30]:
S' |
ρ1 |
|
S |
|
ρ0 |
, |
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
R1 |
|
|
R0 |
|
|
|
|
|
|
|
|
|
|
|
||
S' |
S |
m1 |
|
dρ1 |
|
|
m2 |
dρ0 |
|
m3 |
dS |
, , |
(6.23) |
|||
|
ds |
|
|
|
ds |
ds |
||||||||||
dρ0 |
n1ρ0 |
|
n |
|
|
|
dS |
|
n3S. |
|
|
|
|
|||
ds |
|
2 ds |
|
|
|
|
||||||||||
Наличие большого числа материальных постоянных в последних соотношениях позволяют более точно описать экспериментальные данные, приводя, однако, к потребности более сложных экспериментов, чем в классических теориях пластического течения.
Следует отметить, что работы в направлении построения новых вариантов двухповерхностных теорий продолжаются (например, для описания сложного («непропорционального») циклического нагружения, что требует введения дополнительных параметров, характеризующих сложность нагру-
218
жения [72, 73]), поэтому представленный здесь краткий обзор теорий этого класса, конечно, не является сколь-нибудь полным. Впрочем, авторы и не ставили такой цели, главным является ознакомление с существующими «ветвями» и направлениями развития классической теории пластического течения.
219
О статистических теориях пластичности
Для большинства материалов, поведение которых описывается теми или иными теориями МДТТ на макроуровне, по мере углубления в микромир характерно выявление микроэлементов материала, обладающих примерно одинаковыми законами эволюции микроструктуры, механизмами деформирования, относительно стабильными физическими характеристиками. В связи с этим в МДТТ (и МСС в целом) одним из наиболее интенсивно развивающихся и, вероятно, перспективных направлений построения определяющих соотношений является статистический подход. Согласно указанному подходу выделяются микроструктурные элементы исследуемого материала, поведение которых описывается однотипными законами (по возможности – простыми), с минимально потребным количеством физических характеристик. Затем для достаточно большой совокупности микроструктурных элементов, составляющих представительный объем материала (в макросмысле), осуществляется статистическое осреднение.
Статистический подход до настоящего времени достаточно успешно применяется в теории упругости, в первую очередь – для композиционных материалов. В последнее время предпринимаются энергичные попытки применить его в теории пластичности, ряд из них следует признать достаточно успешными для сегодняшнего состояния теории пластичности. Однако, как отмечают авторы монографии [55], в настоящее время не представляется возможным достичь в теории пластичности хотя бы того же уровня строгости описания, как в теории упругости. Основным «камнем преткновения» является необходимость при построении статистической теории пластичности поликристаллов (или любой другой «теории неупругости») учитывать не только статистику упругих свойств зерен (в первую очередь – стохастическую ориентацию анизотропных зерен, субзерен), но и статистику различного рода дефектов (см. гл. 3).
В связи с этим в [55] предлагается так называемый квазистатистиче-
ский вариант теории пластичности, «…в котором при отказе от точного осреднения анизотропии кристаллитов, точного осреднения условий их взаимодействия и точного учета механических свойств отдельных кристаллитов тем не менее делается попытка уловить статистический характер процесса пластического деформирования» [55, с.26]. В рассматриваемой работе все многообразие случайных факторов (ориентации анизотропных (как по упругим, так и пластическим свойствам) зерен и субзерен, микроструктуры, включая дислокационные субструктуры, распределения точечных дефектов и т.д.) предлагается учитывать за счет статистического распределения предела текучести в элементах, совокупностью которых представляется поликристалл. В то же время разработанная теория [55] позволяет моделировать основные особенности поведения материалов даже при описании достаточно тонких эффектов. В связи с этим остановимся на этой теории несколько подробнее.
220