

2. Состав оборудования системы «Трасса» и принцип работы навигационного вычислителя
В состав оборудования системы «Трасса» входят следующие основные устройства и приборы (рис. 20.1):
1. Доплеровский измеритель путевой скорости и угла сноса (ДИСС).
2. Автоматическое навигационное устройство (АНУ); его называют также навигационным вычислителем.
3. Датчик курса.
4. Датчик воздушной скорости.
5. Задатчик угла карты.
6. Указатель угла сноса и путевой скорости.
7. Счетчик координат.
Доплеровский измеритель путевой скорости и угла сноса непрерывно измеряет путевую скорость и угол сноса и выдает эти данные на указатель. Одновременно с этим значения путевой скорости и угла сноса подаются в навигационный вычислитель, который осуществляет счисление пройденного самолетом пути по осям С (Y) и В (X) в ортодромической системе координат.
Навигационный вычислитель связан с курсовой системой и задатчиком угла карты. При установке на задатчике МУК = ОЗМПУ координатная ось С совмещается с ЛЗП, а координатная ось В располагается перпендикулярно к ней.
Сигналы курса самолета, поступающие от курсовой системы, и сигналы угла сноса, поступающие от доплеровского измерителя, складываются и их сумма сравнивается с ОЗМПУ, установленным на задатчике угла карты.
В основу работы навигационного вычислителя положено автоматическое определение углового бокового уклонения самолета, т. е. решение равенства БУ = (ОМК + УС) — ОЗМПУ.
Если сумма курса и угла сноса равна ОЗМПУ, то вектор путевой скорости самолета совмещен с координатной осью С. Если это равенство
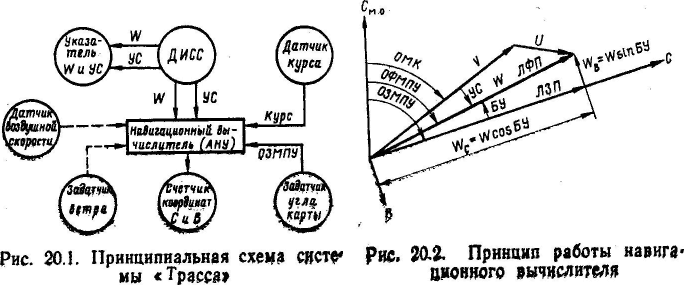
не обеспечивается, то вектор путевой скорости раскладывается навигационным вычислителем на две составляющие. Одна из них Wc направлена по направлению ЛЗП, а другая WB — перпендикулярно к ЛЗП (рис. 20.2). Суммирование углов и разложение вектора путевой скорости на составляющие по осям С и В происходит непрерывно электромеханическим способом.
Полученные составляющие Wc и WB интегрируются по времени специальными моторчиками, которые и выдают на счетчик координат текущие значения координат места самолета в виде пройденного пути по ортодромии и линейного бокового уклонения.
3. Органы управления, указатели системы «Трасса» и их назначение
Система «Трасса» имеет следующие органы управления и указатели:
1. Щиток управления системой.
2. Указатель угла сноса и путевой скорости.
3. Задатчик угла карты,
4. Счетчик координат.
5. Переключатель «ДИСС—АНУ».
6. Переключатель «Счетчик» («Вкл.—Выкл.»).
7. Задатчик ветра.
Щиток управления (рис. 20.3) предназначен для управления системой при проверке ее работоспособности и при решении задач самолетовождения. На нем расположены два переключателя и две сигнальные лампочки.
Левый переключатель имеет следующие четыре положения:
1. «Выкл.» — для выключения низкого напряжения.
2. «Вкл.» — для включения низкого напряжения. При этом загорается зеленая сигнальная лампочка с надписью «Вкл.».
3. «Пам» — для включения системы в режим работы «Память». Это положение переключателя используется для проверки и работы системы в режиме «Память». В этот режим система может переводиться вручную или автоматически, когда прекращается поступление отраженных сигналов при полете с креном более 10° или когда полет происходит над спокойной водной поверхностью (волнение менее 1 балла). О переходе системы на работу в режим «Память» сигнализирует загорание табло, расположенного на указателе угла сноса и путевой скорости.
4. «Высок.» — для включения высокого напряжения. При этом загорается красная сигнальная лампочка.
Правый переключатель также имеет четыре положения:
1. «Суша» — для работы системы при полете над сушей,
2. «Море» — для работы системы при полете над морем,
Рис. 20.3. Щиток управления и указатель угла сноса и путевой скорости
Эти положения переключателя позволяют учесть характер отражающей поверхности, над которой пролетает самолет. При полете над спокойным морем заметно изменяется коэффициент отражения по сравнению с коэффициентом отражения для суши, что вносит ошибки в измерение путевой скорости и угла сноса. Эти ошибки носят систематический характер, и их можно исключить при калибровке системы. Калибровка системы для полета над морем ведется для средней степени волнения водной поверхности. При переходе с суши на море появляется ошибка в измерении путевой скорости в сторону занижения. В режиме «Море» изменяется калибровка системы приблизительно на 2,5%.
3. «Контр. 1» и
4. «Контр. 2» — для контроля калибровки системы.
Указатель угла сноса и путевой скорости предназначен для указания текущего значения угла сноса и путевой скорости. Он имеет стрелку, которая показывает угол сноса, и цифровой счетчик, показывающий путевую скорость самолета. На указателе расположено сигнальное табло, которое загорается при прекращении работы ДИСС в те моменты, когда отраженные сигналы не попадают на приемник.
Задатчик угла карты предназначен для установки ОЗМПУ данного участка маршрута.
Счетчик координат предназначен для указания координат места самолета. Данные о месте самолета счетчик выдает в условной прямоугольной (ортодромической) системе координат. Стрелка «С» указывает координату С (У), а стрелка «В» — координату В (X).
Переключатель «ДИСС — АНУ» расположен на приборной доске штурмана и предназначен для включения навигационного вычислителя в режим работы «ДИСС» или в режим автономной работы при прекращении поступления данных об угле сноса и путевой скорости от ДИСС.
Переключатель «Счетчик» расположен рядом со счетчиком координат и предназначен для включения и выключения счетчика координат.
В положении переключателя «Вкл.» включается счетчик координат и выдает координаты места самолета с момента его включения. В положении переключателя «Выкл.» счетчик координат выключается и его стрелки останавливаются.
Задатчик ветра предназначен для установки направления и скорости ветра при включении навигационного вычислителя в режим автономной работы. В этом случае счисление пути выполняется по данным ветра, установленным на задатчике.