

11. Определение магнитного пеленга ориентира с помощью девиационного пеленгатора
Для определения МПО необходимо:
1) установить треногу в центре площадки, где будет списываться девиация;
2) закрепить пеленгатор на треноге и установить его в горизонтальное положение по уровню;
3) отстопорить лимб и магнитную стрелку;
4) вращением лимба совместить 0 шкалы лимба с северным направлением магнитной стрелки, после чего закрепить лимб;
5) разворачивая визирную рамку и наблюдая через прорезь глазного диоптра, направить нить предметного диоптра на выбранный ориентир;
6) против риски предметного диоптра по шкале лимба отсчитать МПО.
12. Установка самолета на заданный магнитный курс
Для определения девиации компаса необходимо знать, каков магнитный курс самолета, и сравнить его значение с компасным курсом, так как
Δк = МК - КК.
Самолет устанавливается на заданный МК:
1) пеленгованием продольной оси самолета;
2) по магнитному пеленгу ориентира.
Установка самолета на заданный МК пеленгованием продольной оси самолета применяется, когда невозможно установить девиационный пеленгатор на самолете в том месте, откуда открыт обзор для наблюдения за ориентирами, когда плохая видимость или нет удаленных ориентиров.
Порядок работы при этом способе следующий:
1) вырулить самолет на выбранную площадку для девиационных работ и развернуть его на нужный курс по компасу;
2) установить девиационный пеленгатор впереди (сзади) самолета на удалении 40—50 м строго в створе продольной оси;
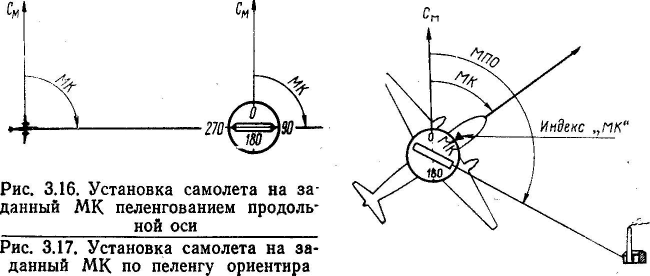
3) отрегулировать пеленгатор по уровню и совместить линию лимба 0—180° с магнитной стрелкой (рис. 3. 16);
4) развернуть визирную рамку так, чтобы линия визирования совпала с продольной осью самолета;
5) по шкале лимба против риски соответствующего диоптра отсчитать МК самолета.
Если МК не будет равен заданному, то самолет доворачивают по компасу на необходимое число градусов, а затем снова пеленгуют его. Так поступают до тех пор, пока МК, определенный пеленгатором, станет равным заданному или будет отличаться от него не более чем на ±2°.
Установка самолета на заданный МК по пеленгу ориентира применяется, когда есть удаленные ориентиры и их можно пеленговать с борта самолета при помощи девиационного пеленгатора.
Порядок работы при этом способе состоит в следующем:
1) из центра площадки для девиационных работ измерить при помощи девиационного пеленгатора магнитные пеленги одного-двух, ориентиров, удаленных не менее чем на 3—5 км (второй ориентир берется на случай, если первый будет закрываться какой-либо деталью самолета);
2) записать название выбранных ориентиров и.полученные пеленги в протокол выполнения девиационных работ;
3) вырулить самолет на площадку и установить его по компасу на произвольный курс;
4) при помощи девиационного пеленгатора пеленгованием продольной оси определить фактический МК самолета;
5) не сбивая самолета с курса, укрепить девиационный пеленгатор на самолете, отрегулировать его по уровню, развернуть относительно лимба визирную рамку так, чтобы риска диоптра стала против значения МПО, и закрепить рамку в этом положении;
6) вращая лимб, совместить линию визирования с удаленным ориентиром, пеленг которого установлен на лимбе, после чего подвести индекс «МК» против деления лимба, соответствующего МК самолета, и закрепить его винтом. В этом случае линия лимба 0—180° будет ориентирована вдоль магнитного меридиана, а индекс «МК» обозначит продольную ось самолета (рис. 3. 17).
Для установки самолета на заданный МК необходимо развернуть лимб вместе с закрепленной визирной рамкой так, чтобы значение заданного МК стало против индекса «МК». Разворотом самолета добиться совмещения линии визирования с выбранным ориентиром.