

Глава 15 самолетовождение с использованием наземных радиопеленгаторов
Задачи самолетовождения, решаемые с помощью наземных радиопеленгаторов
Наземный радиопеленгатор — это специальное приемное радиотехническое устройство, позволяющее определять направление на самолет, на котором работает передающая радиостанция. Данные пеленгации наземного радиопеленгатора могут быть использованы только при наличии двусторонней связи экипажа самолета с землей.
Экипаж самолета (командир корабля, штурман или бортрадист) через самолетный передатчик запрашивает у диспетчера радиопеленг соответствующим кодовым выражением в телефонном или телеграфном режиме. Диспетчер в момент запроса радиопеленга производит пеленгование самолетного передатчика и сообщает по радио на борт самолета результаты пеленгования, т. е. значение радиопеленга. По запросу с борта самолета диспетчер может сообщить экипажу направление от радиопеленгатора на самолет или направление от самолета на радиопеленгатор.
Наземные радиопеленгаторы обладают большим радиусом действия и обеспечивают самолетовождение на большие расстояния. Дальность пеленгования и точность определения пеленга наземными радиопеленгаторами зависит от высоты полета, типа наземного радиопеленгатора, метеоусловий и мощности самолетных передатчиков.
Для коротковолновых радиопеленгаторов (КРП) ближнего действия дальность пеленгования достигает 600 — 1000 км, а точность определения пеленга ±2°. Для КРП дальнего действия дальность пеленгования достигает 5000 — 6000 км, а точность определения пеленга ±1°. Для ультракоротковолновых радиопеленгаторов (УРП) дальность пеленгования для высот полета 3000 — 5000 м составляет 150 — 180 км, а для высот полета 8000 — 10 000 м — до 300 км, точность определения пеленга ±3°.
В комплексе с геотехническими средствами наземные радиопеленгаторы позволяют решать следующие задачи самолетовождения:
а) выполнять полет от радиопеленгатора и на радиопеленгатор в заданном направлении;
б) определять момент пролета радиопеленгатора или его траверза;
в) осуществлять контроль пути по дальности и направлению;
г) определять место самолета и навигационные элементы полета;
д) выполнять пробивание облачности и заход на посадку.
2. Полет от наземного радиопеленгатора
Полет от наземного радиопеленгатора может быть осуществлен в том случае, когда он расположен в исходном пункте маршрута (ИПМ), поворотном пункте маршрута (ППМ) или в любой другой точке на ЛЗП.
П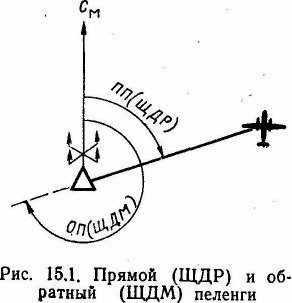 ри
использовании УКВ радиопеленгаторов
для контроля пути по направлению
запрашивается в телефонном режиме
пеленг от радиопеленгатора на самолет
(прямой пеленг — ПП) словами «Дайте
прямой пеленг». При использовании
KB
радиопеленгаторов для контроля пути
по направлению запрашиваются пеленги
в телеграфном режиме кодовым выражением
ЩДР, которое означает: «Сообщите
магнитный пеленг от вас» (рис. 15.1).
ри
использовании УКВ радиопеленгаторов
для контроля пути по направлению
запрашивается в телефонном режиме
пеленг от радиопеленгатора на самолет
(прямой пеленг — ПП) словами «Дайте
прямой пеленг». При использовании
KB
радиопеленгаторов для контроля пути
по направлению запрашиваются пеленги
в телеграфном режиме кодовым выражением
ЩДР, которое означает: «Сообщите
магнитный пеленг от вас» (рис. 15.1).
Прямым пеленгом (ЩДР) называется угол, заключенный между северным направлением магнитного меридиана, проходящего через
радиопеленгатор, и ортодромическим направлением на самолет. ПП измеряется от северного направления магнитного меридиана до направления на самолет по ходу часовой стрелки от 0 до 360°.
Полет от радиопеленгатора может быть выполнен следующими способами: с выходом на ЛЗП; с выходом в КПМ (ППМ).
Контроль пути по направлению при полете от радиопеленгатора осуществляется сравнением прямого пеленга (ЩДР) с ЗМПУ. В результате этого сравнения определяется боковое уклонение самолета от ЛЗП. Если полученный ПП=ЗМПУ или отличается от него на 1—2°, то самолет находится на ЛЗП, если ПП>ЗМПУ, то самолет находится правее ЛЗП, если ПП<ЗМПУ, то самолет находится левее ЛЗП (рис. 15.2).
Величину БУ и УСф при полете от радиопеленгатора определяют по формулам: БУ = ПП—ЗМПУ; УСф = ПП—МКР.
Пример. ЗМПУ=70°; МКР=80°; ПП = 75°. Определить БУ и УСф. Решение. 1. БУ=ПП—ЗМПУ = 75°—70°= + 5°.
2. УСф = ПП—МКр=75°— 80°= — 5°.
Полет от радиопеленгатора с выходом на ЛЗП применяется при значительном уклонении самолета от ЛЗП, а также в тех случаях, когда необходимо строго следовать по ЛЗП, в такой последовательности (рис. 15.3):
1. Пройти радиопеленгатор с МКр или МК = ЗМПУ.
2. Через 5—15 мин полета запросить прямой пеленг (ЩДР), сравнить его с ЗМПУ и определить сторону и величину бокового уклонения: БУ=ПП—ЗМПУ.
3. Вывести самолет на ЛЗП, для чего задаться углом выхода (Увых берется в пределах 20—90°), определить и установить самолет на МК выхода. МКвых=ЗМПУ±Увых
4. Следуя к ЛЗП, необходимо чаще запрашивать ПП и определить момент выхода на ЛЗП по ППвых=ЗМПУ.
5. После выхода на ЛЗП установить самолет на курс следования
МКсл = МКР — (± БУ) или МКсл = ЗМПУ — (± УСф).
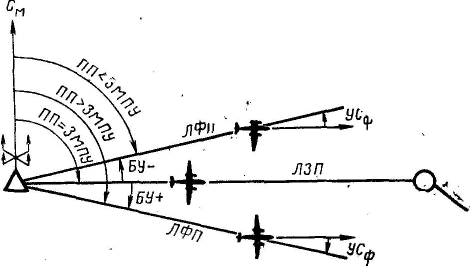
Рис. 15.2. Контроль пути по направлению при полете от радиопеленгатора
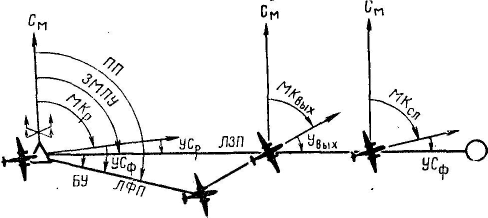
Рис. 15.3. Полет от радиопеленгатора с выходом на ЛЗП
6. Дальнейший контроль пути по направлению осуществлять периодическим запросом и сравнением ПП с ЗМПУ (ППслед= ЗМПУ).
Пример. ЗМПУ = 90°; МКР==85°; ПП=100°; Увых = 30°. Определить данные для выхода и следования по ЛЗП.
Решение. 1. Определяем БУ, МКвых и ППвых
БУ = ПП — ЗМПУ = 100° — 90° = + 10°.
МКвых = ЗМПУ ± Увых = 90°— 30° = 60°.
ППвых = ЗМПУ — 90°.
2. Рассчитываем МКсл и УСф.
МКсл = МКр — (± БУ) — 85° — (+ 10°) = 75°.
УСф = ПП — МКр = 100° — 85° = + 15°.
МКсл = ЗМПУ — (± УСф) = 90° — (+ 15°) = 75°.
3. ППсл = ЗМПУ = 90°.
Полет от радиопеленгатора с выходом в КПМ (ППМ) применяется, когда мало уклонение самолета от ЛЗП или оставшееся расстояние до КПМ (ППМ).
Полет выполняется в такой последовательности (рис. 15.4): 1. Пройти радиопеленгатор с МКр или МК = ЗМПУ.
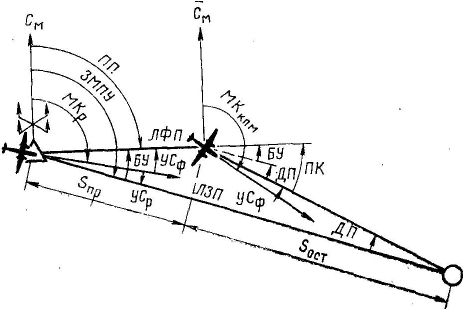
Рис. 15.4. Полет от радиопеленгатора с выходом в КПМ (ППМ)
2. Через 5—15 мин полета запросить «Прямой» пеленг (ЩДР); сравнить его с ЗМПУ и определить сторону и величину бокового уклонения:
БУ = ПП — ЗМПУ;
3. Рассчитать дополнительную поправку и поправку в курс
ДП = (Sпр/Soct)·БУ;
ПК = БУ + ДП.
4. Установить самолет на МК следования в КПМ (ППМ):
МКкпм=МКР — (±ПК).
Пример. ЗМПУ= 120°; МКР=П8°; Sпр = 70 км; ПП=110°; Sост = 120 км. Определить данные для полета в КПМ (ППМ). Решение. 1. Определяем БУ и ДП:
БУ == ПП — ЗМПУ = 110° — 120° = — 10°
ДП = (Sпр/Soct)·БУ =70/120·10== —6°.
2. Рассчитываем ПК, МКкпм и УСф.
ПК = БУ + ДП = (— 10°) + (—6°) = — 16°.
МКкпм = МКр — (± ПК) = 118° — (— 16°) = 134°.
УСф = ПП —МКр==110°—118°= —8°.