

7. Магнитные поля, действующие на картушку компаса, установленного на самолете
На картушку магнитного компаса, установленного на самолете, действуют следующие поля:
1) магнитное поле Земли (оно стремится направить стрелку магнитного компаса по магнитному меридиану);
2) постоянное магнитное поле самолета;
3) переменное магнитное поле самолета;
4) электромагнитное поле, создаваемое работающим электро- и радиооборудованием самолета.
Постоянное магнитное поле самолета создается твердым самолетным железом. Твердое железо — это такие ферромагнитные массы самолета, которые длительно сохраняют магнитные свойства, т. е. обладают большой коэрцитивной силой. Твердое железо рассматривают в магнитном отношении как постоянный магнит. Постоянное магнитное поле самолета сохраняет величину и направление относительно продольной оси самолета на любом курсе и вызывает полукруговую девиацию.
Переменное магнитное поле самолета создается мягким самолетным железом. Мягкое железо — это такие ферромагнитные массы самолета, которые имеют неустойчивую намагниченность, т. е. обладают малой коэрцитивной силой. Они легко перемагничиваются при перемене курса самолета. Переменное магнитное поле самолета меняет свою величину и направление относительно продольной оси в зависимости от курса самолета и вызывает четвертную девиацию.
Электромагнитное поле, создаваемое работающим электро- и радиооборудованием самолета, по характеру действия аналогично магнитному полю твердого железа. Поэтому девиация, вызываемая электромагнитным полем, обычно рассматривается совместно с девиацией, вызываемой твердым железом.
Рассмотрим полукруговую и четвертную девиацию и их характеристики.
Полукруговая девиация и ее характеристика. Девиация называется полукруговой потому, что она 2 раза (через полукруг) приходит к нулю и 2 раза меняет свой знак при повороте самолета на 360°.
Для удобства рассмотрения суммарное действие постоянного магнитного поля самолета можно заменить эквивалентным действием бруска твердого железа. Предположим, что брусок твердого железа расположен по продольной оси самолета. Обозначим буквой Н горизонтальную составляющую магнитного поля Земли, а буквой F вектор напряженности магнитного поля бруска твердого железа. Так как вектор F направлен по продольной оси самолета, то на МК=0° его действие будет совпадать с действием вектора R (рис. 3. 9) и F не вызывает отклонения картушки компаса от плоскости магнитного меридиана. Поэтому на МК=0° девиация равна нулю.Из рисунка видно, что при изменении курса самолета направление результирующего вектора R изменяется. На МК=90° вектор F

Рис. 3.9. Полукруговая девиация:
а —действие магнитного поля твердого железа; б —график полукруговой девиации
направлен под прямым углом к вектору H и создает максимальную положительную девиацию. При дальнейшем повороте самолета девиация начнет уменьшаться и на курсе 180° снова станет равной нулю. Затем после курса 180° вектор F начнет вызывать отрицательную девиацию, которая достигнет максимальной величины на МК=270°.
Полукруговая девиация имеет следующие особенности:
а) при повороте самолета на 360° она дважды достигает максимального значения и 2 раза становится равной нулю;
б) на противоположных курсах полукруговая девиация равна по величине, но противоположна по знаку;
в) полукруговая девиация составляет большую часть девиации компаса и ее можно полностью компенсировать с помощью постоянных магнитов девиационного прибора.
В общем случае брусок твердого железа может и не совпадать по направлению с продольной осью самолета, что не меняет характера полукруговой девиации, но смещает ее график по отношению курсов самолета на угол, равный углу между продольной осью самолета и направлением оси бруска. Полукруговая девиация при любом положении бруска твердого железа будет дважды равняться нулю при повороте самолета на 360°.
Четвертная девиация и ее характеристика. Девиация называется четвертной потому, что она при повороте самолета на 360° 4 раза (через четверть круга) становится равной нулю и 4 раза меняет свой знак.
Мягкое железо приобретает свойства магнита при воздействии на него магнитного поля Земли и, как уже отмечалось, имеет неустойчивую намагниченность. Брусок мягкого железа, расположенный определенным
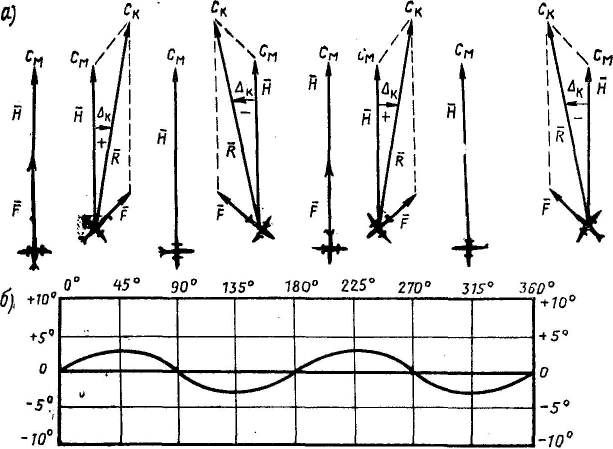
Рис. 3.10. Четвертная девиация: а — действие магнитного поля мягкого железа; б — график четвертной девиации
образом по отношению к магнитному полю Земли, намагничивается не по направлению магнитных силовых линий, а по длине бруска. Намагниченность бруска
B= μHсоsα,
где В — магнитная индукция; μ — магнитная проницаемость бруска; α — угол между направлением вектора напряженности поля и направлением бруска.
Следовательно, максимальное намагничивание бруска мягкого железа происходит в том случае, когда брусок расположен по направлению силовых линий поля. Когда брусок расположен перпендикулярно к магнитным силовым линиям, то намагниченность его равна нулю. Поэтому при перемене курса самолета мягкое железо перемагничивается и создает переменное поле самолета, которое меняет свою величину и направление относительно продольной оси самолета.
Для удобства объяснения влияния мягкого железа на магнитный компас расположим вблизи компаса брусок мягкого железа вдоль продольной оси самолета. Обозначим вектор напряженности поля бруска мягкого железа буквой F (рис. 3.10).
На МК = 0° векторы F и H совпадут по направлению. Хотя намагниченность бруска мягкого железа в этом случае будет максимальной, она не вызовет отклонения картушки компаса от плоскости магнитного меридиана и девиация останется равной нулю.
При повороте самолета брусок мягкого железа отклоняется от направления силовых линий магнитного поля Земли и намагниченность бруска уменьшается. На МК=45° действие магнитного поля мягкого железа вызовет максимальное значение положительной девиации. На МК=90° мягкое железо потеряет свойства магнита, так как брусок расположится перпендикулярно к силовым линиям магнитного поля Земли и девиация снова станет равной нулю. При дальнейшем повороте самолета брусок мягкого железа перемагнитится и вызовет отрицательную девиацию, которая на МК=135° достигнет максимального значения. Из рисунка видно, что на МК, равных 180 и 270°, девиация вновь достигнет нуля, а на МК, равных 225 и 315°, будет максимальной.
Четвертная девиация имеет следующие свойства:
а) при повороте самолета на 360° она 4 раза достигает максимума и 4 раза становится равной нулю;
б) на противоположных курсах четвертная девиация равна по величине и по знаку;
в) четвертная девиация составляет меньшую часть девиации компаса.
Характер изменения этой девиации не позволяет устранять ее с помощью постоянных магнитов. Она списывается и заносится в график. В современных компасах (ГИК-1) четвертная девиация компенсируется с помощью механического компенсатора.
К ак
правило, переменное магнитное поле
самолета нельзя, за исключением редких
случаев, привести к действию одного
бруска мягкого железа. Расположение
деталей из мягкого железа на самолете
обычно таково, что своим действием они
вызывают, кроме четвертной, постоянную
девиацию.
ак
правило, переменное магнитное поле
самолета нельзя, за исключением редких
случаев, привести к действию одного
бруска мягкого железа. Расположение
деталей из мягкого железа на самолете
обычно таково, что своим действием они
вызывают, кроме четвертной, постоянную
девиацию.
Постоянная девиация вызывается мягким самолетным железом, расположенным вокруг компаса и намагниченным магнитным полем Земли (рис. 3.11). Железные детали, расположенные вокруг компаса, могут создать такое суммарное магнитное поле, которое не будет изменять своей величины и положения в пространстве при изменении курса самолета, т. е. массы мягкого железа могут образовать магнитное поле с устойчивой полярностью.
Обозначим вектор напряженности магнитного поля, вызванного мягким железом, расположенным по окружности, буквой F. Если разложить этот вектор на составляющую ΔH, направленную по магнитному меридиану, и составляющую ΔF, направленную перпендикулярно к
меридиану, то можно заметить, что составляющая ΔF вызовет постоянную по величине и знаку девиацию на всех курсах. Постоянная девиация компенсируется одновременно с устранением установочной ошибки путем поворота компаса (датчика).
8. Магнитные силы, действующие на стрелку компаса. Формула девиации
На стрелку компаса, установленного на самолете, в горизонтальной плоскости одновременно оказывают действие шесть магнитных сил.
1. Сила λH, действующая в направлении магнитного меридиана. Источником этой силы является в основном горизонтальная составляющая магнитного поля Земли и в меньшей мере мягкое железо, намагниченное земным магнетизмом. Направление этой силы не зависит от курса самолета. Ее величина изменяется с изменением магнитной широты места. Эта сила стремится установить стрелку компаса вдоль магнитного меридиана и девиации не вызывает (рис. 3.12).
2 .
Сила АλН,
действующая
перпендикулярно магнитному меридиану
(к востоку или западу). Создается мягким
железом, расположенным по окружности
вокруг
.
Сила АλН,
действующая
перпендикулярно магнитному меридиану
(к востоку или западу). Создается мягким
железом, расположенным по окружности
вокруг
компаса и намагниченным магнитным полем Земли. Направление силы не зависит от курса самолета. Ее величина изменяется с переменой магнитной широты места, вызывает постоянную девиацию. _
3. Сила ВλН, действующая в направлении продольной оси самолета. Создается твердым железом, расположенным вдоль продольной оси самолета, вызывает полукруговую девиацию. На курсах 0 и 180° девиация равна нулю, а на курсах 90 и 270° — максимальной величине. Девиация от этой силы изменяется по закону синуса, т. е.
Δ1к = В sinMK.
4. Сила СλН, действующая перпендикулярно продольной оси самолета (в правый или левый борт). Создается твердым железом, расположенным вдоль поперечной оси самолета, и вызывает полукруговую девиацию. На курсах 90 и 270° девиация равна нулю, а
на курсах 0 и 180° — максимальному значению. Девиация от этой силы изменяется по закону косинуса, т. е.
ΔIIк =CcosMK.,
5. Сила DλH, действующая по отношению меридиана в направлении двойного магнитного курса. Создается мягким железом, намагниченным магнитным полем Земли, и вызывает четвертную девиацию. На курсах 0, 90, 180 и 270° эта сила направлена вдоль магнитного меридиана и девиации не вызывает. На курсах 45, 135, 225, 315° девиация достигает максимального значения. Девиация от этой силы изменяется по закону синуса двойного курса, т. е.
ΔIIIк =Dsin2MK.
6. Сила ЕλН, действующая перпендикулярно к направлению силы DλH. Создается мягким железом, намагниченным магнитным полем твердого самолетного железа, и вызывает четвертную девиацию. На курсах 0, 90, 180, 270° эта сила направлена перпендикулярно к магнитному меридиану и вызывает максимальное значение девиации. На курсах 45, 135, 225, 315° девиация равна нулю. Девиация от этой силы изменяется по закону косинуса двойного курса, т. е.
ΔIVк =Ecos2MK.
Чтобы получить суммарную девиацию компаса, необходимо сложить девиации, производимые каждой силой. Девиация компаса на любом курсе
Δк = А+ В sin МК + С cos МК + D sin 2MK + Ecos 2MK.
Для определения девиации по этой формуле предварительно вычисляют коэффициенты А, В, С, D и Е по специальным формулам.