

Глава 13 самолетовождение с использованием радиокомпаса
1. Задачи самолетовождения, решаемые с помощью радиокомпаса
Автоматический радиокомпас (АРК) является приемным устройством направленного действия, позволяющим определять направление на передающую радиостанцию. АРК совместно с приводными и радиовещательными станциями относится к угломерным системам самолетовождения.
Для использования радиокомпаса в целях самолетовождения экипажу необходимо знать следующие данные о приводных и радиовещательных станциях:
а) месторасположения (координаты);
б) частоту и позывные;
в) вид передачи;
г) время работы и мощность.
В комплексе с геотехническими средствами радиокомпас позволяет решать следующие задачи самолетовождения:
1) выполнять полет от радиостанции или на нее в заданном направлении;
2) осуществлять контроль пути по направлению и дальности;
3) определять момент пролета радиостанции или ее траверза;
4) определять место самолета и навигационные элементы полета;
5) выполнять пробивание облачности и заход на посадку в сложных метеоусловиях.
2. Полет от радиостанции
Полет от радиостанции в заданном направлении может быть выполнен в том случае, если она расположена на ЛЗП в ИПМ, ППМ или контрольном ориентире.
В этом случае полет осуществляется одним из следующих способов:
с выходом на ЛЗП;
с выходом в КПМ (ППМ).
Пеленги, определяемые при полете от радиостанции, можно использовать для контроля пути по направлению.
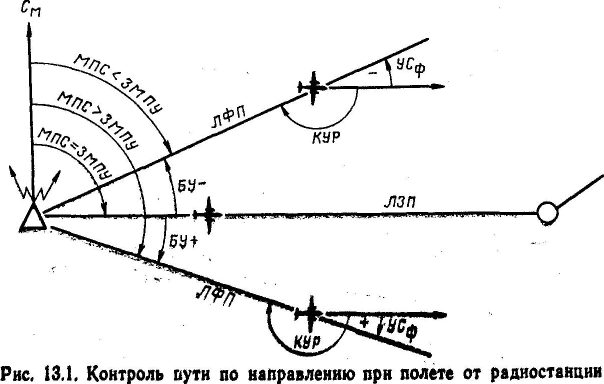
При полете от радиостанции контроль пути по направлению осуществляется сравнением МПС с ЗМПУ. В результате этого сравнения определяется боковое уклонение самолета от ЛЗП. Если МПС=ЗМПУ или отличается не более чем на 2°, то самолет находится на ЛЗП, если МПС больше ЗМПУ, то самолет находится правее ЛЗП, а если меньше, — левее (рис. 13.1).
Б оковое
уклонение и фактический угол сноса
определяются по формулам:
оковое
уклонение и фактический угол сноса
определяются по формулам:
БУ = МПС - ЗМПУ; УСф = МПС - МК;
УСф = КУР - 180°.
Магнитный пеленг самолета
МПС = МК + КУР ± 180°.
В практике МПС определяется с помощью указателя курсовых углов по упрощенной формуле
МПС = МК ± α,
где α = КУР—180°. Знак плюс берется, если КУР>180°, знак минус, если КУР<180°. При КУР=180° МПС=МК (рис. 13.2).
Пример. ЗМПУ=64°; МКр=70°; КУР = 178°. Определить МПС, БУ и УСф. Решение. 1. МПС=МК± α =70°—2°=68°.
2. БУ=МПС—ЗМПУ =68°- 64° = +4°.
3. УСф = КУР—180°= 178°—180°= — 2° или УСф = МПС—МКР= 68°— 70°= —2°.
Полет от радиостанции с выходом на ЛЗП применяется при значительном уклонении самолета от ЛЗП, а также в случаях, когда необходимо строго следовать по ЛЗП. Полет выполняется в такой последовательности (рис. 13.3):
1. Точно пройти радиостанцию с МКр или МК=ЗМПУ.
2. Через 5—15 мин полета отсчитать КУР и определить МПС.
МПС = МК + КУР ± 180° или МПС = МК ± α.
3. Сравнением МПС с ЗМПУ определить сторону и величину бокового уклонения:
БУ = МПС - ЗМПУ; УСф = КУР - 180°.
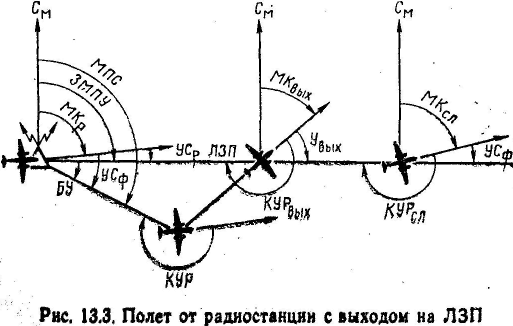
4. Задаться углом выхода, рассчитать МКвых и вывести самолет на ЛЗП. Угол выхода Увых берется в пределах 20—90°. МКвых = ЗМПУ±Увых («+» при левом уклонении, «—» при правом уклонении).
5. Определить момент выхода самолета на ЛЗП по КУРвых = 180°±Увых («+» при правом уклонении, «—» при левом уклонении).
6. После выхода на ЛЗП установить самолет на МКсл = МКР —(±БУ) или МКсл = ЗМПУ— (±УСф).
7. Дальнейший контроль пути по направлению осуществлять сравнением определяемых МПС с ЗМПУ или по КУРсл = 180°+(±УСф).
Пример. ЗМПУ = 90°; МКР=88°; КУР=188°; Увых = 30°. Определить данные для выхода на ЛЗП и следования по ней. Решение. 1. Определяем МПС, БУ и УСф.
МПС = МК ± α = 88° + 8° = 96°; БУ = МПС — ЗМПУ = 96° — 90° = 6°;
УСф = КУР — 180° = 188° — 180° = + 8°.
2. Рассчитываем МКвых и КУРвых
МКвых = ЗМПУ ± Увых = 90° - 30° = 60°;
КУРвых = 180° ± Увых = 180° + 30° = 210°.
3. Находим МКсл и КУРсл
МКсл = МКР — (± БУ) = 88° - (+ 6°) = 82°;
МКсл = ЗМПУ — (± УСф) = 90° — (+ 8°) = 82°;
КУРсл = 180° + (± УСф) = 180° + (+ 8°) = 188°.
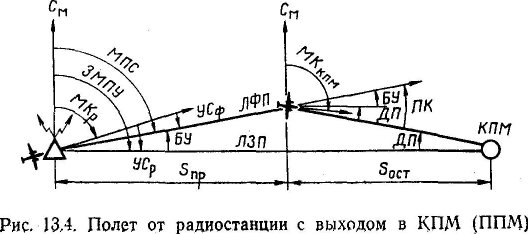
Полет от радиостанции с выходом в КПМ (ППМ) применяется, когда уклонение самолета от ЛЗП или оставшееся расстояние до КПМ (ППМ) малы. Полет выполняется в такой последовательности (рис. 13.4):
1. Точно пройти радиостанцию с МКр или МК=ЗМПУ.
2. Через 5—15 мин полета отсчитать КУР и определить МПС:
МПС = МК + КУР ± 180° или МПС = МК ± α.
3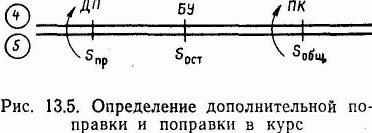 .
Сравнением МПС с
.
Сравнением МПС с
ЗМПУопределить сторону:и величину бокового уклонения:
БУ = МПС - ЗМПУ; УСф= КУР-180°.
4. По пройденному и оставшемуся расстоянию или времени определить ДП и рассчитать ПК по формулам:
ДП=Sпр/Socт· БУ; ПК = БУ + ДП
или с помощью НЛ-10М (рис. 13.5).
5. Определить курс следования в КПМ (ППМ) и установить на него самолет:
МККПМ = МКр — (± ПК)
6. Дальнейший контроль пути по направлению осуществляется выдерживанием рассчитанного МККПМ
Пример. ЗМПУ=92°; МКР = 85°; КУР =183°; tпр=14 мин; tocт = 11 мин. Определить данные для полета в КПМ (ППМ). Решение. 1. Находим МПС и БУ;
МПС = МК ± а = 85° + 3° = 88°. БУ = МПС — ЗМПУ = 88° — 92° = — 4°.
2. Рассчитываем ДП и ПК:
ДП= tпр/ tocт· БУ = 14/11· 4
ПК = БУ + ДП = (— 4°) + (— 5°) = — 9°.
3. Определяем МК для следования в КПМ:
МККПМ = МКр — (± ПК) = 85° — (— 9°) = 94°.