

3. Методы использования ни-50бм в полете
Навигационный индикатор может быть использован в полете следующими методами:
1. Методом контроля пройденного расстояния.
2. Методом контроля оставшегося расстояния (методом прихода стрелок к нулю).
3. Методом условных координат.
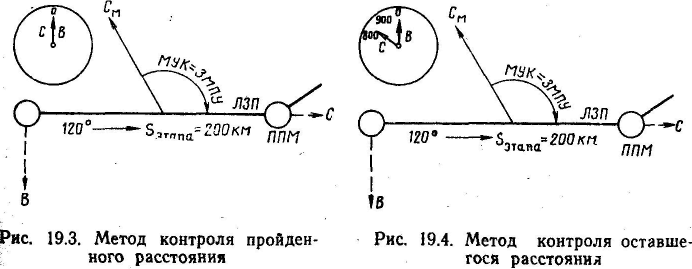
Использование навигационного индикатора методом контроля пройденного расстояния. Этот метод является основным. Он применяется при полете по трассе, когда штурману необходимо знать пройденное расстояние. В этом случае необходима полетная карта с нанесенным маршрутом. Карта готовится согласно НШС ГА и не требует какой-либо дополнительной подготовки. Для использования НИ-50БМ этим методом направление координатной оси С совмещают с ЛЗП. Магнитный угол карты берется равным ЗМПУ. Стрелки счетчика координат устанавливают в нулевое положение. За начало отсчета координат намечается любая точка маршрута (ИПМ, ППМ, КО).
При таком расположении осей координат стрелка «С» будет показывать пройденный самолетом путь, а стрелка «В» — сторону и величину ЛБУ (рис. 19.3).
Для использования НИ-50БМ методом контроля пройденного расстояния необходимо:
1. На счетчике координат установить стрелки в нулевое положение.
2. На автомате курса и задатчике ветра установить МУК= ЗМПУ данного участка маршрута.
3. На задатчике ветра установить направление навигационного ветра и его скорость.
4. Включить индикатор над пунктом, который взят в качестве качала отсчета координат, и убедиться в работе индикатора по вращению контрольных индексов счетчика координат.
5. В тот момент, когда необходимо определить место самолета, отсчитать показания стрелок счетчика координат и заметить время.
6. Отметить на карте место самолета, для чего отложить от пункта начала отсчета координат по ЛЗП пройденное расстояние, отсчитанное по стрелке «С», и от полученной точки отложить ЛБУ, отсчитанное по стрелке «В».
7. В момент пролета ППМ произвести установку данных для очередного участка маршрута, приняв за новое начало отсчета координат пролетаемый ППМ.
Использование навигационного индикатора методом контроля оставшегося расстояния. Этот метод применяется, когда штурману необходимо знать оставшееся расстояние до ППМ. Для использования индикатора этим методом координатную ось С совмещают с ЛЗП. Магнитный угол карты берется равным ЗМПУ (рис. 19.4). Стрелку «С» отводят ручкой влево от нуля на расстояние до ППМ. В этом случае стрелка «С» счетчика координат будет указывать оставшееся расстояние до ППМ, а стрелка «В» — сторону и величину ЛБУ.
Для использования НИ-50БМ методом контроля оставшегося расстояния необходимо:
1. На счетчике координат стрелку «С» отвести влево от нуля на деление 1000 км — Sэтапа (на оставшееся расстояние), а стрелку «В» установить на нуль.
2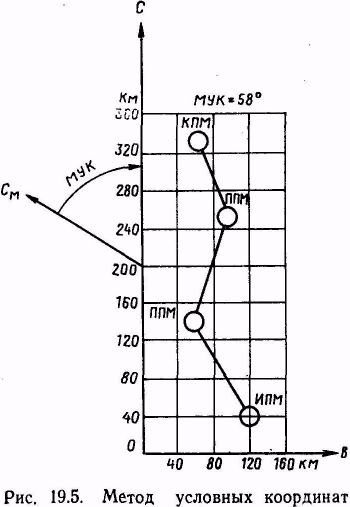 .
На автомате курса и задатчике ветра
установить МУК= ЗМПУ данного участка
маршрута.
.
На автомате курса и задатчике ветра
установить МУК= ЗМПУ данного участка
маршрута.
3. На задатчике ветра установить направление навигационного ветра и его скорость.
4. Включить индикатор над намеченным пунктом и убедиться в его работе.
5. В тот момент, когда необходимо определить место самолета, отсчитать показания стрелок счетчика координат и заметить время.
6. Отметить на карте место самолета, для чего отложить от ППМ по ЛЗП оставшееся расстояние, которое определено по стрелке «С», и от полученной точки отложить ЛБУ, указываемое стрелкой «В».
7. Определить момент выхода самолета на ППМ по приходу стрелок счетчика координат в нулевое положение.
8. В момент пролета ППМ произвести установку данных для следующего участка маршрута.
Использование навигационного индикатора методом условных координат. Этот метод можно применить при полете по трассе с большим количеством изломов. Он позволяет избежать частые установки угла карты.
Для применения НИ-50БМ методом условных координат на бортовую карту заранее с помощью специального трафарета наносится координатная сетка (рис. 19.5). Линии сетки проводятся цветной тушью через 2 см. Оцифровка линий выполняется в соответствии с масштабом карты. Для удобства пользования координатной сеткой ось С располагают так, чтобы район полета находился в положительном секторе значений координат С и В. Рекомендуется ось С располагать вдоль основного направления трассы. Магнитный угол карты определяют для среднего меридиана района полета, если магнитное склонение в данном районе изменяется не более чем на 2°. При большем изменении магнитного склонения МУК определяется для каждого участка трассы.
Для использования НИ-50БМ методом условных координат необходимо:
1. На счетчике координат установить координаты ИПМ, отсчитанные по подготовленной карте.
2. На автомате курса и задатчике ветра установить магнитный угол карты района полета.
3. На задатчике ветра установить направление навигационного ветра и его скорость.
4. Включить индикатор над пунктом, координаты которого установлены на счетчике координат.
5. В тот момент, когда необходимо определить место самолета, отсчитать показание стрелок счетчика и записать время отсчета и значения координат в бортовой журнал.
6. По заранее подготовленной карте отложить отсчитанные координаты и в точке пересечения координатных линий треугольником отметить место самолета с указанием времени его определения.
Вследствие того, что навигационный индикатор имеет погрешности, место самолета определяется с точностью 3—5% пройденного самолетом пути от точки начала счисления. Ошибки счисления во многом зависят от связи навигационного индикатора с датчиком курса. Когда навигационный индикатор связан с магнитным компасом, от которого в индикатор поступает МК, то ошибки счисления возрастают, так как полет в этом случае происходит по локсодромии, а счисление ведется индикатором в ор-тодромической прямоугольной системе координат. При связи навигационного индикатора с курсовой системой или с ДАК-ДБ-5, когда в индикатор выдается ортодромический курс, точность счисления пути повышается.
Для предотвращения накопления больших ошибок счисления пути рекомендуется периодически производить корректировку показаний стрелок счетчика координат, т. е. устанавливать их на показания, соответствующие фактическому месту самолета, определенному визуально, с помощью самолетного радиолокатора или по данным, полученным от службы движения.
Установка ветра на задатчике ветра должна производиться каждый раз после его определения. Если ветер на задатчике ветра не установлен, то навигационный индикатор будет выдавать координаты штилевого места самолета.
4. Определение ветра
Для определения ветра с помощью НИ-50БМ необходимо:
1. На счетчике координат установить стрелки в нулевое положение.
2. На автомате курса установить МУК=ЗМПУ данного участка маршрута.
3. На задатчике ветра установить скорость ветра, равную нулю.
4. При пролете опознанного ориентира включить индикатор.
5. Через 15—20 мин полета визуально, бортовым радиолокатором или с помощью РСБН-2 точно определить место самолета, отметить его на карте и записать время.
6. К моменту определения места самолета отсчитать показания счетчика координат и по отсчитанным координатам нанести да карту штилевое место самолета (рис. 19.6).
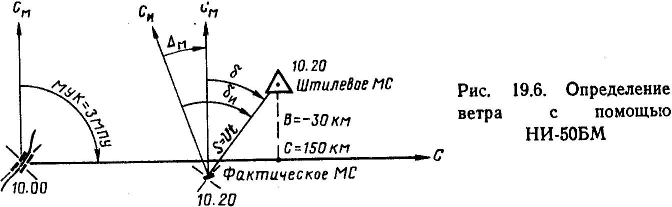
7. Соединить на карте отметки штилевого и фактического места самолета прямой линией и при помощи транспортира измерить истинное направление метеорологического ветра как угол, заключенный между северным направлением истинного меридиана, проходящего через отметку фактического места самолета, и вектором ветра.
8. Определить магнитное направление метеорологического ветра по формуле: δ = δи—(±ΔМ).
9. Измерить масштабной линейкой расстояние между отметками штилевого и фактического места самолета. Эта прямая будет вектором ветра за время полета от точки начала счисления до момента отсчета координат штилевого места самолета.
Скорость ветра рассчитывается на НЛ-10М или по формуле: U=S/t.
Для определения скорости ветра с помощью НЛ-10М. необходимо время полета, взятое по шкале 2, подвести под расстояние между отметками штилевого и фактического места самолета по шкале 1 и против треугольного индекса шкалы 2 прочитать по шкале 1 скорость ветра в километрах в час.