

Геометрические понятия. Дифференцирование единичного вектора
Радиус кривизны
и соприкасающаяся плоскость.
В точке
кривой линии проведем касательную
Рис. 12![]() :
(рис. 12). В другой близкой точке кривой
,
отстоящей от точки
на расстоянии
:
(рис. 12). В другой близкой точке кривой
,
отстоящей от точки
на расстоянии
![]() ,
построим касательную
,
построим касательную
![]() .
В общем случае пространственной кривой
касательные
и
будут с
.
В общем случае пространственной кривой
касательные
и
будут с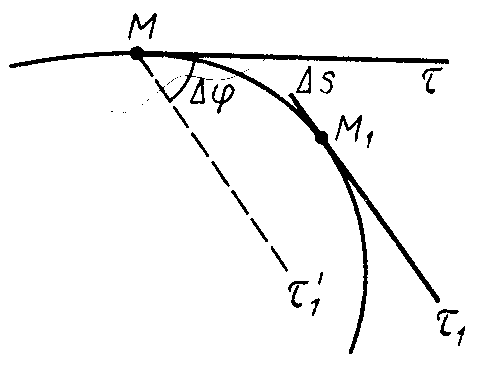 крещиваться.
Проведем в точке
прямую линию
крещиваться.
Проведем в точке
прямую линию
![]() ,
параллельную
.
Угол
,
параллельную
.
Угол
![]() между линиями
и
называется углом
смежности.
Кривизной
кривой
между линиями
и
называется углом
смежности.
Кривизной
кривой
![]() в точке
называют предел, к которому стремится
угол смежности, п
в точке
называют предел, к которому стремится
угол смежности, п
![]() .
.
Радиусом кривизны
кривой
![]() в точке
называют величину, обратную кривизне
кривой в этой точке, т. е.
в точке
называют величину, обратную кривизне
кривой в этой точке, т. е.
![]() .
.
В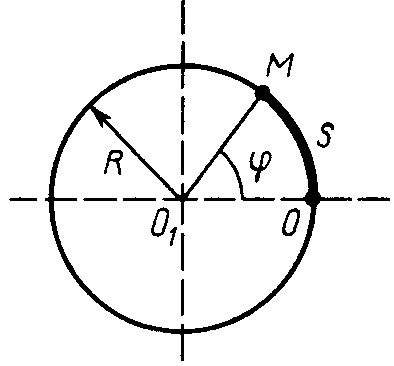 ычислим
радиус кривизны дуги окружности радиусом
ычислим
радиус кривизны дуги окружности радиусом
![]() .
(рис. 13). Дуга окружности длиной
,
опирающаяся на центральный угол
.
(рис. 13). Дуга окружности длиной
,
опирающаяся на центральный угол
![]() ,
выражается зависимостью
,
выражается зависимостью
![]() .
Для радиуса кривизны имеем:
.
Для радиуса кривизны имеем:
![]() ,
,
т
Рис. 13
Участок кривой из малой окрестности какой-либо ее точки лучше всего аппроксимирует по сравнению с дугами других окружностей элемент дуги окружности, радиус которой равен радиусу кривизны кривой в рассматриваемой точке.
Для определения понятия соприкасающейся плоскости проводим вспомогательную плоскость через две пересекающиеся прямые и (см. рис. 12). Предельное положение этой плоскости при совпадении в пределе точки с точкой называется соприкасающейся плоскостью кривой в точке .
В случае плоской кривой соприкасающейся плоскостью для всех точек кривой является сама плоскость, в которой расположена эта кривая.
Е
Рис. 14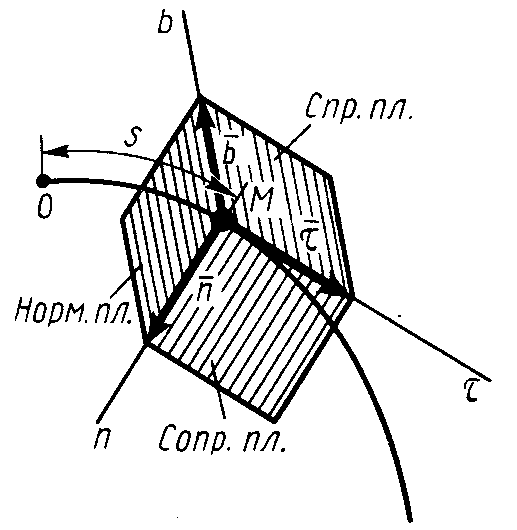
Перпендикулярно
касательной
![]() располагается нормальная
плоскость
кривой. Нормаль, расположенная в
соприкасающейся плоскости, называется
главной
нормалью
располагается нормальная
плоскость
кривой. Нормаль, расположенная в
соприкасающейся плоскости, называется
главной
нормалью
![]() .
Она является линией пересечения
нормальной плоскости с соприкасающейся
плоскостью. По главной нормали внутрь
вогнутости кривой направим единичный
вектор
.
Она является линией пересечения
нормальной плоскости с соприкасающейся
плоскостью. По главной нормали внутрь
вогнутости кривой направим единичный
вектор
![]() .
Он определяет положительное направление
второй естественной оси.
.
Он определяет положительное направление
второй естественной оси.
Нормаль,
перпендикулярная главной нормали,
называется бинормалью.
Единичный вектор
![]() ,
направленный по бинормали так, чтобы
три вектора
,
,
направленный по бинормали так, чтобы
три вектора
,
![]() и
образовывали правую систему осей
координат, определит положительное
направление третьей естественной оси.
и
образовывали правую систему осей
координат, определит положительное
направление третьей естественной оси.
Три взаимно
перпендикулярные оси
,
и
![]() ,
положительные направления которых
совпадают с направлениями единичных
векторов
,
,
положительные направления которых
совпадают с направлениями единичных
векторов
,
![]() и
и
![]() ,
называются естественными
осями кривой.
Эти оси образуют в точке М естественный
трехгранник.
При движении точки по кривой естественный
трехгранник движется вместе с точкой
как твердое тело, поворачиваясь вокруг
вершины, совпадающей с движущейся
точкой.
,
называются естественными
осями кривой.
Эти оси образуют в точке М естественный
трехгранник.
При движении точки по кривой естественный
трехгранник движется вместе с точкой
как твердое тело, поворачиваясь вокруг
вершины, совпадающей с движущейся
точкой.
Дифференцирование единичного вектора. Вычислим производную от единичного вектора по скалярному аргументу. В кинематике точки скалярными аргументами обычно являются время и расстояние по траектории. В качестве единичного вектора выберем , направленный по касательной к траектории, и вычислим его производную по времени.
Производная
![]() перпендикулярна самому единичному
вектору
.
Для доказательства этого используем
тождество:
перпендикулярна самому единичному
вектору
.
Для доказательства этого используем
тождество:
![]() .
.
Дифференцируя по времени обе части этого тождества, получим
![]() .
.
Каждый из сомножителей этого выражения не равен нулю, поэтому векторы и перпендикулярны друг другу. Это справедливо для любого другого вектора, числовая величина (модуль) которого постоянна. Направим по вектору единичный вектор . Тогда
![]() . (15)
. (15)
Годографом вектора является кривая, расположенная на сфере единичного радиуса, так как единичный вектор изменяется только по направлению (рис. 15).
По определению модуля производной от вектора имеем
![]() .
.
Д лина
малой хорды
лина
малой хорды
![]() с точностью до малых величин более
высокого порядка равна длине дуги,
которую стягивает хорда, т. е.
с точностью до малых величин более
высокого порядка равна длине дуги,
которую стягивает хорда, т. е.
![]() ,
,
г
Рис. 15
![]() .
.
Подставляя это значение в (15) и используя выражение для радиуса кривизны и переменную , получим
![]() .
.
Радиус кривизны считаем положительным.
Вектор
и совпадающий с ним по направлению
единичный вектор
направлены параллельно предельному
положению вектора
![]() при
,
стремящемся к нулю, т.е. они расположены
в соприкасающейся плоскости кривой.
Единичный вектор
перпендикулярен вектору
,
направленному по касательной к кривой.
Следовательно, вектор
направлен по главной нормали кривой в
сторону ее вогнутости, так как в эту
сторону направлено предельное положение
вектора
.
при
,
стремящемся к нулю, т.е. они расположены
в соприкасающейся плоскости кривой.
Единичный вектор
перпендикулярен вектору
,
направленному по касательной к кривой.
Следовательно, вектор
направлен по главной нормали кривой в
сторону ее вогнутости, так как в эту
сторону направлено предельное положение
вектора
.
Если имеем любой
другой вектор
с постоянным модулем, то для него остается
справедливым все, что было получено для
единичного вектора, только радиус
годографа следует заменить его модулем
![]() .
Получим
.
Получим
![]() , (16)
, (16)
где
– теперь единичный вектор, перпендикулярный
вектору
и направленный параллельно
![]() .
.
Формулу (16) можно выразить векторным произведением:
![]() ,
,
где
![]() – вектор угловой скорости поворота
вектора
,
модуль которого
– вектор угловой скорости поворота
вектора
,
модуль которого
![]() .
Вектор угловой скорости
следует направить перпендикулярно
плоскости, в которой расположены векторы
и
,
причем так, чтобы с его стрелки увидеть
поворот вектора
к
в этой плоскости на угол 90° против
часовой стрелки. Подробнее понятие
вектора угловой скорости дается при
рассмотрении вращения твердого тела
вокруг неподвижной оси и в других случаях
его движений.
.
Вектор угловой скорости
следует направить перпендикулярно
плоскости, в которой расположены векторы
и
,
причем так, чтобы с его стрелки увидеть
поворот вектора
к
в этой плоскости на угол 90° против
часовой стрелки. Подробнее понятие
вектора угловой скорости дается при
рассмотрении вращения твердого тела
вокруг неподвижной оси и в других случаях
его движений.