

5.2. Сложение скоростей
Е
Рис. 65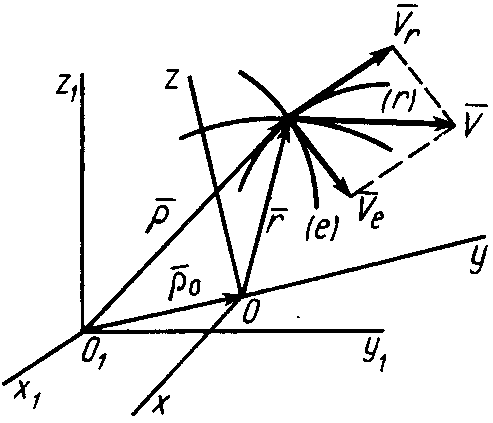
Движение
подвижной системы осей координат
относительно неподвижной можно
охарактеризовать скоростью ее
поступательного движения
,
например вместе с точкой
и вектором угловой скорости
ее вращения вокруг
.
Пусть точка
движется относительно подвижной системы
координат. Получим теорему сложения
скоростей. Для этого проведем векторы
и
,
характеризующие положение точки
относительно неподвижной и подвижной
систем осей координат, и вектор
![]() точки
.
Для любого момента времени
точки
.
Для любого момента времени
![]() . (127)
. (127)
Продифференцируем по времени это векторное тождество, учитывая изменения векторов относительно неподвижных осей координат, т. е. вычислим полные производные. Получим
![]() .
.
По
определению,
![]() является абсолютной скоростью точки
,
является абсолютной скоростью точки
,
![]() – абсолютной скоростью точки
.
Для вычисления
– абсолютной скоростью точки
.
Для вычисления
![]() применим формулу Бура. Имеем
применим формулу Бура. Имеем
![]() .
.
Относительная
производная
![]() является относительной скоростью точки
по отношению к подвижной системе отсчета,
а
– угловая скорость вращения подвижной
системы отсчета и, следовательно,
радиуса-вектора
,
если бы он в рассматриваемый момент
времени был скреплен с подвижной системой
осей координат. Таким образом, из (127)
получаем
является относительной скоростью точки
по отношению к подвижной системе отсчета,
а
– угловая скорость вращения подвижной
системы отсчета и, следовательно,
радиуса-вектора
,
если бы он в рассматриваемый момент
времени был скреплен с подвижной системой
осей координат. Таким образом, из (127)
получаем
![]() . (128)
. (128)
Скорость
![]()
является скоростью точки свободного твердого тела, скрепленного с подвижной системой координат, с которой в данный момент совпадает точка в движении тела относительно неподвижной системы осей координат. Это есть переносная скорость точки . Из (128) получаем следующую теорему сложения скоростей для точки:
. (129)
т.е. скорость абсолютного движения точки равна векторной сумме переносной и относительной скоростей.
5.3. Сложение ускорений точки в общем случае переносного движения
Абсолютное ускорение точки определим вычислением полной производной по времени от абсолютной скорости (128). Имеем
![]() .
.
Для полных производных от векторов и , применим формулу Бура. Получим
,
![]() .
.
Учитывая, что
![]() ,
,
,
,
,
,
![]() ,
,
получим для абсолютного ускорения
![]() . (130)
. (130)
В
этой формуле первые три слагаемых
составляют ускорение точки свободного
твердого тела в общем случае его движения
вместе с подвижной системой осей
координат относительно неподвижной.
Первое слагаемое
![]() – ускорение точки
,
– ускорение точки
,
![]() и
и
![]() – соответственно вращательное и
осестремительное ускорения точки
,
если бы она двигалась только вместе с
подвижной системой осей координат, не
имея в рассматриваемый момент времени
относительного движения. После этого
(130) примет вид
– соответственно вращательное и
осестремительное ускорения точки
,
если бы она двигалась только вместе с
подвижной системой осей координат, не
имея в рассматриваемый момент времени
относительного движения. После этого
(130) примет вид
![]() , (131)
, (131)
где
![]() . (132)
. (132)
Ускорение
![]() называется ускорением
Кориолиса.
Иногда его также называют добавочным
(или поворотным)
ускорением.
называется ускорением
Кориолиса.
Иногда его также называют добавочным
(или поворотным)
ускорением.
Формула (131) выражает теорему сложения ускорений точки, или кинематическую теорему Кориолиса: абсолютное ускорение точки является векторной суммой трех ускорений – переносного, относительного и Кориолиса.
Переносное ускорение рассматривалось при изучении движения свободного твердого тела. Относительное ускорение изучалось в кинематике точки. Его можно выразить в двух формах в зависимости от способа задания относительного движения. При координатном способе задания в декартовых координатах
![]() ,
,
где – координаты движущейся точки относительно подвижной системы осей координат; – единичные векторы этих осей. При естественном способе задания движения
![]() ,
,
![]() ,
,
![]() ,
,
где
![]() – расстояние от начала отсчета до точки
по траектории относительного движения;
– расстояние от начала отсчета до точки
по траектории относительного движения;
![]() – радиус кривизны этой траектории. В
частном случае, когда переносное движение
есть вращение вокруг неподвижной оси,
переносное ускорение
– радиус кривизны этой траектории. В
частном случае, когда переносное движение
есть вращение вокруг неподвижной оси,
переносное ускорение
![]() ,
,
где касательное переносное ускорение
![]() ,
,
причем – кратчайшее расстояние от движущейся точки до оси вращения. Нормальное переносное ускорение
![]() .
.
Абсолютное ускорение в этом случае
![]() . (133)
. (133)