

Уравнения движения свободного твердого тела
В
общем случае для определения положения
свободного твердого тела относительно
системы координат
достаточно задать относительно этой
системы координат положение другой
системы координат
![]() ,
движущейся поступательно относительно
первой системы вместе с какой-либо
точкой
рассматриваемого тела, и углы Эйлера,
определяющие положение системы координат
,
скрепленной с движущимся телом,
относительно системы координат
(рис. 60).
,
движущейся поступательно относительно
первой системы вместе с какой-либо
точкой
рассматриваемого тела, и углы Эйлера,
определяющие положение системы координат
,
скрепленной с движущимся телом,
относительно системы координат
(рис. 60).
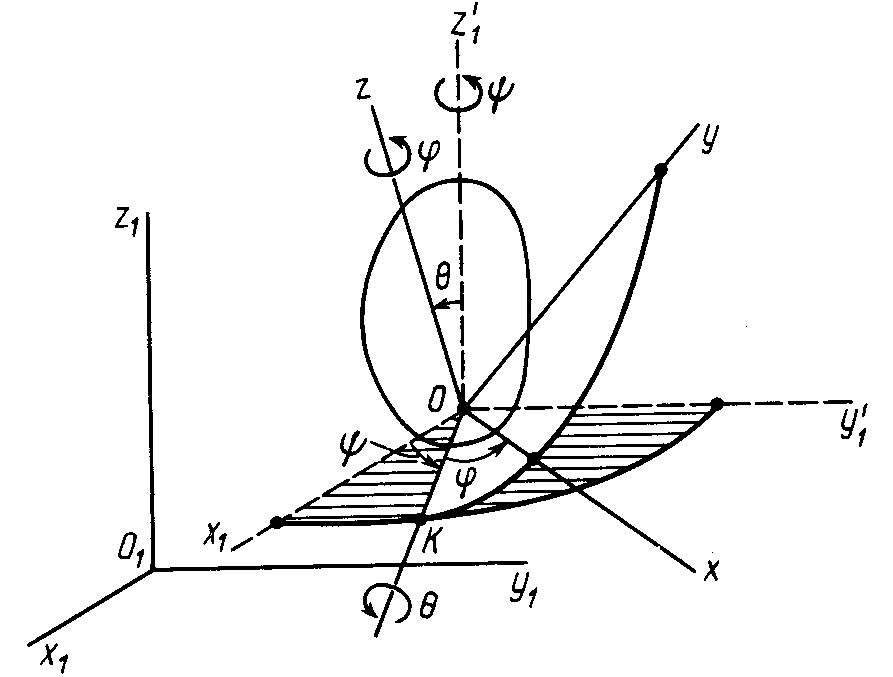
Рис. 60
Для
простоты предположим, что оси
![]() ,
,
![]() ,
,
![]() соответственно параллельны осям
соответственно параллельны осям
![]() ,
,
![]() ,
,
![]() .
Таким образом, положение свободного
твердого тела относительно системы
координат
полностью определяется, если относительно
этой системы задать координаты точки
тела как однозначные функции времени
и углы Эйлера подвижной системы координат
,
скрепленной с движущимся телом,
относительно системы координат
,
поступательно движущейся вместе с
точкой
тела:
.
Таким образом, положение свободного
твердого тела относительно системы
координат
полностью определяется, если относительно
этой системы задать координаты точки
тела как однозначные функции времени
и углы Эйлера подвижной системы координат
,
скрепленной с движущимся телом,
относительно системы координат
,
поступательно движущейся вместе с
точкой
тела:
![]() ,
,
![]() ,
,
![]() ,
,
![]() ,
,
![]() ,
,
![]() . (115)
. (115)
Уравнения (115) являются кинематическими уравнениями движения свободного твердого тела в общем случае его движения. Этих уравнений шесть, т.е. столько, сколько степеней свободы у свободного твердого тела. Первые три уравнения (115) определяют переносное движение тела вместе с точкой , вторые три уравнения определяют вращательное движение вокруг этой точки.
Первые три уравнения для рассматриваемого движения свободного твердого тела зависят от выбора точки тела; последние три уравнения (углы Эйлера) не зависят от выбора точки , вокруг которой рассматривается вращение тела.
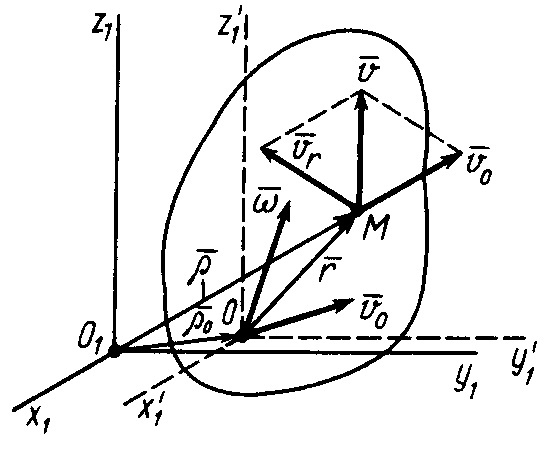
Скорости и ускорения точек свободного твердого тела в общем случае
Так как движение свободного твердого тела в общем случае можно представить как сложное движение, то и скорость, и ускорение какой-либо точки этого тела можно вычислить соответственно по теоремам сложения скоростей и ускорений (рис. 61). Так, для скорости точки
.
Переносным
движением является поступательное
движение тела вместе с точкой
этого тела. Следовательно, скорости
поступательного переносного движения
одинаковы у всех точек тела и равны
скорости
точки
.
Относительное движение есть вращение
вокруг точки
,
и, следовательно, скорость относительного
движения м
Рис. 61
![]()
 ,
,
где – радиус-вектор точки , проведенный из точки ; – угловая скорость вращения тела вокруг точки или подвижной мгновенной оси, проходящей через точку .
Окончательно для скорости точки получим следующую формулу:
![]() . (116)
. (116)
Формулу (116) можно получить непосредственным дифференцированием векторного равенства
![]() ,
,
справедливого для любого момента времени. Возьмем полные производные по времени от обеих частей равенства, учитывая изменения векторов относительно неподвижной системы координат . Имеем
![]() .
.
Здесь
![]() ,
,
![]() – скорости точек тела
и
соответственно. Модуль вектора
как отрезка, соединяющего две точки
тела, не изменяется при движении этого
тела. Следовательно, по формуле производной
по времени от вектора постоянного модуля
получаем
– скорости точек тела
и
соответственно. Модуль вектора
как отрезка, соединяющего две точки
тела, не изменяется при движении этого
тела. Следовательно, по формуле производной
по времени от вектора постоянного модуля
получаем
![]() .
.
Объединяя результаты, получаем формулу (116):
 .
.
Так
же как и при плоском движении твердого
тела, часть скорости
![]() можно истолковать как скорость от
вращения тела вокруг точки
.
можно истолковать как скорость от
вращения тела вокруг точки
.
У
Рис. 62
![]() .
.
Ускорения переносного движения всех точек тела равны ускорению точки , так как за поступательное переносное движение принимается движение вместе с точкой .
Ускорение относительного движения, как и при вращении тела вокруг неподвижной точки, состоит из вращательной и осестремительной составляющих, т.е.
![]() , (117)
, (117)
где – угловое ускорение тела.
Окончательная формула для ускорения точки свободного тела в общем случае его движения имеет вид
![]() , (118)
, (118)
на основании формулы Ривальса
![]() , (119)
, (119)
где
![]() ,
,
![]() .
.
Формулу (118) можно получить непосредственным дифференцированием векторного равенства для скоростей (116), справедливого в любой момент времени. Вычисляя полные производные по времени, при определении которых учитываются изменения векторов относительно неподвижной системы координат, получаем
![]() .
.
Здесь
![]() ,
,
![]() – ускорения точек
и
;
– ускорения точек
и
;
![]() – угловое ускорение.
– угловое ускорение.
Учитывая, что вектор является вектором постоянного модуля, имеем
.
Окончательный результат выразится в форме
.
Заметим, что если в кинематике свободного твердого тела в качестве точки можно брать любую точку тела, то в динамике в качестве такой точки оказывается выгодным выбирать центр масс тела.
П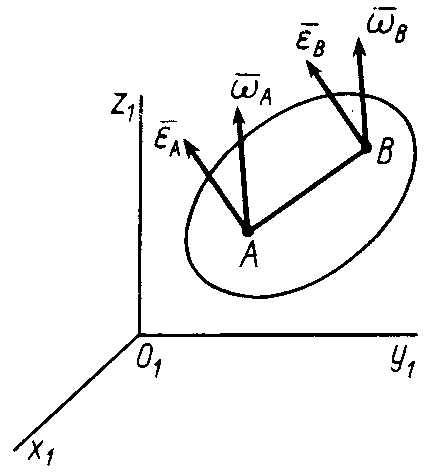 ри
выборе различных точек тела в качестве
полюса изменяются скорость и ускорение
полюса. Угловая скорость и угловое
ускорение при этом не изменяются. Докажем
это для угловой скорости, используя
(116).
ри
выборе различных точек тела в качестве
полюса изменяются скорость и ускорение
полюса. Угловая скорость и угловое
ускорение при этом не изменяются. Докажем
это для угловой скорости, используя
(116).
Пусть и – две точки свободного твердого тела (рис. 63). Приняв за полюс точку , для скорости точки имеем
Рис. 63![]()
где
![]() – угловая скорость вращения тела вокруг
точки
.
Аналогично, приняв за полюс точку
,
для скорости точки
получим
– угловая скорость вращения тела вокруг
точки
.
Аналогично, приняв за полюс точку
,
для скорости точки
получим
![]() , (121)
, (121)
где
![]() – угловая скорость вращения тела вокруг
точки
.
Из (120) и (121) имеем
– угловая скорость вращения тела вокруг
точки
.
Из (120) и (121) имеем
![]() ,
,
![]()
для
любых двух точек свободного твердого
тела. Эти точки можно выбрать так, чтобы
не было параллельно вектору
![]() .
Тогда получаем
.
Тогда получаем
![]() ,
,
![]() , (122)
, (122)
т.е. угловая скорость свободного твердого тела не зависит от выбора полюса. Она инвариантна по отношению к выбору полюса. Так как равенство (122) справедливо для любого момента времени, то, дифференцируя его по времени, получим
![]() ,
,
![]() ,
,
т.е. вектор углового ускорения свободного твердого тела тоже не зависит от выбора полюса.