

6.1. Сложение поступательных движений твердого тела
Имеем
твердое тело, участвующее одновременно
в двух поступательных движениях, одно
из которых является переносным со
скоростью
,
а другое – относительным со скоростью
![]() .
Таким образом, твердое тело движется
относительно подвижной системы координат
поступательно со скоростью
,
а подвижная система координат движется
относительно неподвижной
тоже поступательно со скоростью
(рис. 67). Движение тела относительно
основной системы координат является
сложным.
.
Таким образом, твердое тело движется
относительно подвижной системы координат
поступательно со скоростью
,
а подвижная система координат движется
относительно неподвижной
тоже поступательно со скоростью
(рис. 67). Движение тела относительно
основной системы координат является
сложным.
У
Рис. 67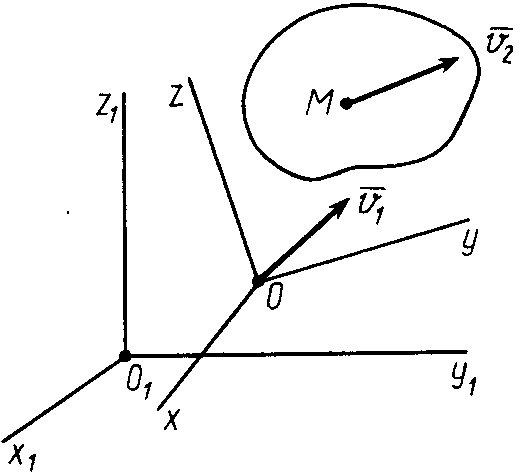
![]() .
По теореме сложения скоростей для точки
имеем
.
По теореме сложения скоростей для точки
имеем
![]() , (135)
, (135)
так как переносное и относительное движения тела являются поступательными. Это справедливо для любой точки рассматриваемого тела, а потому сложное движение тела является поступательным со скоростью . Таким образом, от сложения двух поступательных движений твердого тела получается поступательное движение со скоростью, равной векторной сумме скоростей составляющих поступательных движений.
Если
имеется последовательность поступательных
движений тела, первое из которых является
относительным по отношению к переносному
второму, а это второе – относительным
к переносному третьему и т.д. (скорости
таких последовательных движений
соответственно
![]() ),
то от сложения этих движений путем
последовательного применения (135) получим
поступательное движение тела со скоростью
),
то от сложения этих движений путем
последовательного применения (135) получим
поступательное движение тела со скоростью
![]() . (136)
. (136)
6.2. Сложение вращательных движений твердого тела Сложение вращений вокруг пересекающихся осей
П
Рис. 68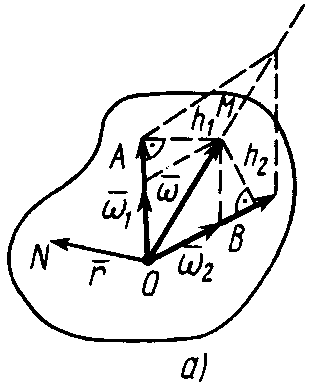
![]() и относительном с угловой скоростью
и относительном с угловой скоростью
![]() .
Оси вращений пересекаются в точке
(рис. 68). Векторы угловых скоростей как
скользящие векторы можно считать
перенесенными в точку
осей вращения.
.
Оси вращений пересекаются в точке
(рис. 68). Векторы угловых скоростей как
скользящие векторы можно считать
перенесенными в точку
осей вращения.
П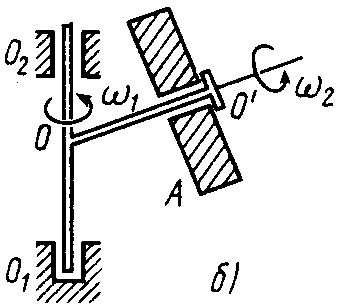
![]() и вращающийся вокруг нее с угловой
скоростью
.
Вместе с осью
диск еще вращается вокруг другой оси
и вращающийся вокруг нее с угловой
скоростью
.
Вместе с осью
диск еще вращается вокруг другой оси
![]() (рис. 69) с угловой скоростью
.
(рис. 69) с угловой скоростью
.
О
Рис. 69![]() .
Докажем, что любая другая точка
тела, находящаяся на диагонали
параллелограмма, построенного на
векторах угловых скоростей
.
Докажем, что любая другая точка
тела, находящаяся на диагонали
параллелограмма, построенного на
векторах угловых скоростей
![]() и
,
тоже имеет в рассматриваемый момент
скорость, равную нулю.
и
,
тоже имеет в рассматриваемый момент
скорость, равную нулю.
По теореме о сложении скоростей для точки имеем:
![]() .
.
Так как переносное и относительное движения являются вращениями вокруг осей, то
![]() ,
,
![]() ,
,
где
![]() – кратчайшие расстояния от точки
до соответствующих осей вращения.
Площади треугольников в параллелограмме
равны, поэтому
– кратчайшие расстояния от точки
до соответствующих осей вращения.
Площади треугольников в параллелограмме
равны, поэтому
![]() .
Векторы скоростей
.
Векторы скоростей
![]() и
и
![]() имеют противоположные направления.
Таким образом,
имеют противоположные направления.
Таким образом,
![]() .
Это справедливо для любой точки
,
расположенной на диагонали параллелограмма,
так как масштаб векторов можно изменять.
Точки оси
имеют скорости, равные нулю. Следовательно,
является мгновенной осью вращения тела
в рассматриваемый момент, т.е. при
сложении двух вращений вокруг
пересекающихся осей, одно из которых
переносное, а другое – относительное,
получается вращение тела вокруг
мгновенной оси.
.
Это справедливо для любой точки
,
расположенной на диагонали параллелограмма,
так как масштаб векторов можно изменять.
Точки оси
имеют скорости, равные нулю. Следовательно,
является мгновенной осью вращения тела
в рассматриваемый момент, т.е. при
сложении двух вращений вокруг
пересекающихся осей, одно из которых
переносное, а другое – относительное,
получается вращение тела вокруг
мгновенной оси.
Для
определения абсолютной угловой скорости
вращения вокруг мгновенной оси выберем
на теле точку
![]() и вычислим ее скорость один раз как
скорость сложного движения, а другой –
как вращения вокруг мгновенной оси. По
формуле Эйлера для вращательных движений
при сложном движении имеем
и вычислим ее скорость один раз как
скорость сложного движения, а другой –
как вращения вокруг мгновенной оси. По
формуле Эйлера для вращательных движений
при сложном движении имеем
![]() .
.
Для абсолютного вращения вокруг мгновенной оси
![]() .
.
Приравнивая скорости, получаем
![]() , (137)
, (137)
т.е. угловая скорость абсолютного вращения равна векторной сумме угловых скоростей составляющих вращений.
Последовательное применение этого правила сложения вращений вокруг пересекающихся осей позволяет заменить любое количество вращений вокруг пересекающихся осей одним вращением, угловая скорость которого равна векторной сумме угловых скоростей составляющих вращений:
![]() .
.
Тело, участвующее в двух вращениях вокруг пересекающихся осей, имеет неподвижную точку, расположенную на пересечении осей. Оно вращается вокруг неподвижной точки, т.е. совершает сферическое движение. Таким образом, сферическое движение твердого тела можно считать состоящим из двух вращений вокруг пересекающихся осей: переносного и относительного.
С
Рис. 70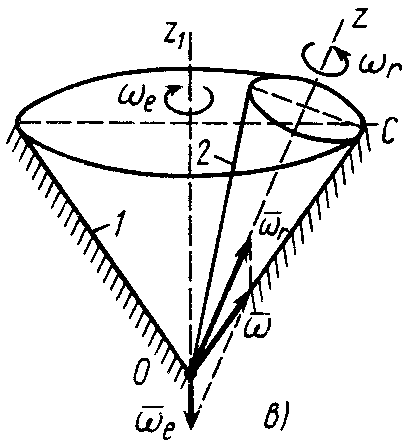
![]() ,
а переносное – вокруг оси неподвижного
конуса
с угловой скоростью
.
Абсолютным движением является вращение
вокруг мгновенной оси
,
а переносное – вокруг оси неподвижного
конуса
с угловой скоростью
.
Абсолютным движением является вращение
вокруг мгновенной оси
![]() с угловой скоростью
с угловой скоростью
![]() .
.
Мгновенная ось , как и ось подвижного конуса , вращается вокруг оси неподвижного конуса с угловой скоростью .
От движения подвижного конуса по неподвижному без скольжения легко перейти к движению подвижной конической шестерни по неподвижной шестерне, если у конусов отрезать их части плоскостями, перпендикулярными осям и .