

5. Сложное движение точки в общем случае
5.1. Абсолютная и относительная производные от вектора. Формула бура
При рассмотрении сложного движения точки в общем случае переносного движения приходится рассматривать изменение векторных величин с течением времени по отношению к системам отсчета, движущимся друг относительно друга. Одно изменение имеет векторная величина относительно подвижной системы отсчета, движущейся относительно другой, неподвижной, и другое – относительно неподвижной системы отсчета. Неподвижной системой отсчета считается система, движение которой относительно других систем отсчета не рассматривается.
Введем
обозначения производных от векторных
величин при рассмотрении их изменения
относительно различных систем отсчета,
движущихся друг относительно друга.
Для любого вектора
![]() его производную по времени по отношению
к неподвижной системе отсчета называют
полной
(или абсолютной)
производной и обозначают
его производную по времени по отношению
к неподвижной системе отсчета называют
полной
(или абсолютной)
производной и обозначают
![]() .
Производную по времени при учете
изменения вектора
относительно подвижной системы отсчета
называют относительной
(или локальной)
производной и обозначают
.
Производную по времени при учете
изменения вектора
относительно подвижной системы отсчета
называют относительной
(или локальной)
производной и обозначают
![]() или
или
![]() .
.
У
Рис. 64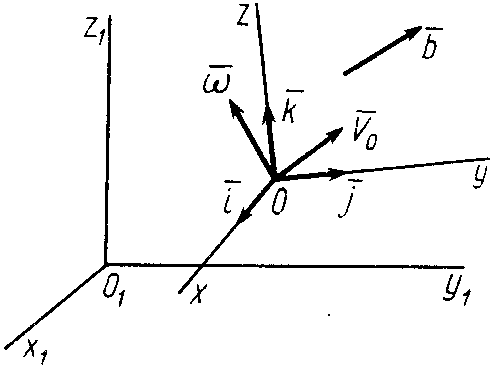
![]() и величинами, характеризующими движение
подвижной системы отсчета относительно
неподвижной (рис. 64). Для этого разложим
вектор
на составляющие, параллельные осям
подвижной системы координат. Имеем
и величинами, характеризующими движение
подвижной системы отсчета относительно
неподвижной (рис. 64). Для этого разложим
вектор
на составляющие, параллельные осям
подвижной системы координат. Имеем
![]() . (123)
. (123)
Изменение
вектора
относительна неподвижной системы
координат
в зависимости от времени состоит из
изменения его проекций
![]() на подвижные оси координат и изменения
единичных векторов
на подвижные оси координат и изменения
единичных векторов
![]() подвижных осей вследствие движения
подвижной системы координат относительно
неподвижной. Вычислим полную производную
по времени от вектора
,
используя формулу (123). Получим
подвижных осей вследствие движения
подвижной системы координат относительно
неподвижной. Вычислим полную производную
по времени от вектора
,
используя формулу (123). Получим
![]() .
(124)
.
(124)
Первые три слагаемых учитывают изменение вектора при неизменных и поэтому составляют относительную производную, т. е.
![]() . (125)
. (125)
Производные по времени единичных векторов определим по формулам Пуассона
, , .
так как эти векторы не изменяются от поступательного движения со скоростью вместе с подвижной системой отсчета (рис. 64). Вектор есть угловая скорость вращательной части движения вокруг точки подвижной системы координат относительно неподвижной. Подставляя эти значения производных единичных векторов в (124) и вынося за скобки, получим
![]() ,
,
или, учитывая (123),
![]() . (126)
. (126)
Получена формула зависимости производных векторов в двух системах отсчета, движущихся друг относительно друга. Формула (126) называется формулой Бура.
Известно, что произвольное движение системы координат как свободного твердого тела можно представить как поступательное движение вместе с полюсом, например с точкой , и вращение вокруг этой точки. Из формулы Бура следует, что поступательная часть движения вместе с полюсом не влияет на зависимость между производными, а влияет только вращательная часть движения.
Рассмотрим частные случаи.
1.
Если вектор
не изменяется относительно подвижной
системы координат, то его относительная
производная
![]() и по формуле (126) получаем
и по формуле (126) получаем
![]() .
.
Это формула для производной от вектора постоянного модуля, доказанная ранее для радиуса-вектора при вращении вокруг неподвижной оси. Она справедлива для любого вектора при произвольном движении подвижной системы осей координат. В рассматриваемом случае не только угловая скорость вращения подвижной системы координат, но и угловая скорость вращения вектора , так как вектор можно при этом считать скрепленным с подвижной системой координат.
2.
Если вектор
не изменяется относительно основной
системы координат, то полная производная
![]() и, согласно (126), его относительная
производная
и, согласно (126), его относительная
производная
![]()
3.
Если
![]() ,
т. е. вектор
все время параллелен вектору угловой
скорости
,
то
,
т. е. вектор
все время параллелен вектору угловой
скорости
,
то
![]() и
и
![]() .
.
В
частности, если
![]() ,
то
,
то
![]() .
.
Полная и локальная производные также равны друг другу в те моменты времени, в которые вектор параллелен вектору угловой скорости .