

2164
.pdfСибирская государственная автомобильно-дорожная академия (CибАДИ)
ТЕОРИЯ МЕХАНИЗМОВ И МАШИН В АВТОМОБИЛЕ– И ТРАКТОРОСТРОЕНИИ
УЧЕБНОЕ ПОСОБИЕ
Под общей редакцией доктора технических наук, профессора В.Т. Швецова
Допущено УМО вузов РФ по образованию в области транспортных машин и транспортно-технологических комплексов в качестве учебного пособия для студентов, обучающихся по специальности 190201 «Автомобиле - и тракторостроение»
Омск Издательство СибАДИ
2006
40

УДК 621.01 ББК 34. 412 Ш 34
Рецензенты: д-р техн. наук, проф. А.П. Болштянский (Омский государственный технический университет); д-р техн. наук, проф. В.А. Нехаев (Омский государственный университет путей сообщения).
Работа одобрена редакционно-издательским советом академии в качестве учебника для студентов.
Теория механизмов и машин в автомобиле– и тракторостроении
/В.Т.Швецов, П.Д.Балакин, В.В.Сыркин, Э.А.Кузнецов, Т.И.Саввантиди; Под ред. В.Т. Швецова: Учебник для втузов. – Омск: Изд-во СибАДИ, 2006. – 255 с.
Содержание учебника позволяет ознакомить в доступной форме будущих инженеров с современными методами расчета по теории механизмов и машин. Рассматриваются вопросы структурного, кинематического, кинетостатического и динамического анализа рычажных механизмов, зубчатые передачи и механизмы с эвольвентным профилем зубьев, методики, связанные с расчетом трения и износа в кинематических соединениях, механика машин с пневмо - и гидроприводом.
Предназначен для студентов гражданских и курсантов военных технических вузов при изучении курса теории механизмов и машин по специальностям, связанным с производством, эксплуатацией и ремонтом колесных и гусеничных машин, а также автобронетанковой техники. Может быть полезен студентам втузов заочной формы обучения машиностроительных специальностей.
|
Авторский коллектив |
|
|
|
|
– |
предисловие, |
Швецов В.Т., профессор, доктор технических наук |
|||
|
|
|
главы 3, 8, 9,10,11 |
Балакин П.Д., профессор, доктор технических наук |
– глава 2 |
||
Сыркин В.В., профессор, доктор технических наук |
– |
глава 12 |
|
Кузнецов Э.А., профессор, кандидат технических наук – главы 5, 6, 7, 8, 9
Саввантиди Т.И., старший преподаватель |
– главы 1, 3,4 |
ISBN 5-93204-260-5 |
C Авторы, 2006 |
41
ПРЕДИСЛОВИЕ
Теория механизмов и машин изучает строение, кинематику и динамику механизмов и машин в связи с их анализом и синтезом.
Курс теории механизмов и машин является одним из основных курсов в общей системе подготовки инженеров.
В связи с этим знание основных положений теории механизмов и машин просто необходимо для последующих курсов инженерной подготовки в области колесных и гусеничных транспортных машин.
Являясь одним из основных инженерных курсов, вместе с тем теория механизмов и машин представляет собой наиболее сложный для усвоения изучаемый предмет.
Основные трудности связаны с тем, что курс основан не только на приложении законов теоретической механики к сложным механизмам различного типа, но и отличается своей спецификой и особенностями, базируется на незнакомой ранее студентам терминологии, является введением в
механику машин в целом.
Усвоение этого материала затруднено и ограничениями по времени, отводимыми на изучение данного предмета в высших технических учебных заведениях.
Поэтому перед авторами была поставлена задача составить учебник по теории механизмов и машин, обеспечивающий студентов и курсантов комплексом знаний, необходимых для решения основных прикладных задач. Ориентация на рассмотрение отдельных типовых задач на лекциях, решение задач на практических занятиях и при самостоятельной работе студентов должно способствовать закреплению основных положений курса, освоению физической сущности рассматриваемых явлений, дать инженерные навыки в анализе работы механизмов, то есть в решении практических вопросов, с которыми постоянно встречается в своей практической деятельности инженер, связанный с проектированием, эксплуатацией и ремонтом колесных и гусеничных машин.
Вучебнике рассматривается материал следующих основных разделов:
структура механизмов;
кинематический и кинетостатический анализ рычажных механизмов;
геометрия и элементы синтеза зубчатых механизмов (плоских и пространственных) с неподвижными
иподвижными осями вращения, а также силовой анализ этих механизмов;
трение и износ в механизмах;
динамический анализ машинного агрегата и уравновешивание его механизмов с жесткими звеньями;
механика гидро- и пневмоприводов.
Излагаются основные теоретические положения, с помощью которых решаются задачи данных разделов, а также приводятся примеры решения задач. Для того чтобы отразить специфику вопросов теории механизмов и машин применительно к транспортной технике, примеры приводятся по характерным для этих машин механизмам. Приведенные задачи наглядно иллюстрируют, как используются разделы курса при исследовании и расчете силовых механизмов, наиболее часто встречающихся именно в этих устройствах. Кроме того, учитываются жесткие ограничения по времени, отводимому на изучение курса ТММ в нынешних учебных программах. В этой связи считаем, что вопросы, связанные с синтезом механизмов с учетом специфики транспортных устройств, в значительной мере выносятся на проработку в профилирующие дисциплины, детально изучающие
42

проектирование колесных и гусеничных машин с учетом их особенностей.
Во избежание дополнительных трудностей для студентов и курсантов авторы придерживались терминологии и обозначений, принятых в этих дисциплинах.
Считаем, что учебник может быть также рекомендован для самостоятельного изучения и студентам втузов заочной формы обучения по машиностроительным специальностям.
Учебник написан коллективом авторов под общей редакцией профессора В.Т. Швецова.
Авторы выражают благодарность рецензентам профессорам |
А.П. Болштянскому и В.А. |
Нехаеву за труд по просмотру рукописи и критические замечания. |
|
43
СТРУКТУРА И КЛАССИФИКАЦИЯ МЕХАНИЗМОВ
1.1. Основные понятия и определения
Механизм есть система тел, предназначенная для преобразования движения одного или несколько твердых тел в требуемое движение других тел. Например, кривошипно-шатунный механизм двигателя внутреннего сгорания превращает поступательное движение поршня во вращательное движение коленчатого вала, а механизм подачи токарного станка − вращательное движение ходового винта в поступательное движение резца. Механизм состоит из многих деталей, т.е. отдельно изготовляемых частей или несколько соединенных твердых тел. Под такими телами в теории механизмов и машин понимают как абсолютно твердые, так и деформируемые и гибкие тела.
3
Д
5
Е 
 0
0
2
4
С
В
1 α1
α1
ω1
 А
А
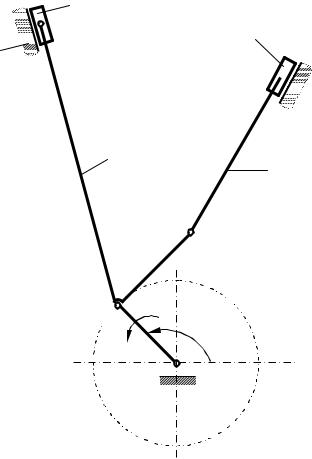
Рис. 1.1. Кинематическая схема механизма
Каждая подвижная деталь или группа деталей, образующая жёсткую подвижную систему тел, носит название подвижного звена механизма. Например, шатун двигателя является сложным подвижным звеном, т.к. он состоит из нескольких деталей: тела шатуна, шатунных подшипников, корпуса шатуна, деталей крепежа.
Из подвижных звеньев выделяют входные и выходные звенья. Входным звеном (входом) называется звено, которому сообщается движение, преобразуемое в движение других звеньев. Выходным звеном (выходом) называется звено, совершающее движение, для выполнения которого
44
предназначен механизм. Остальные подвижные звенья называются соединительными или промежуточными. Звено, совершающее вращательное движение на полный оборот вокруг неподвижной точки, называется кривошипом (коленчатый вал 1, см. рис.1.1). Звено, совершающее вращательное движение на неполный оборот вокруг неподвижной точки, называется коромыслом. Звено, совершающее возвратно-поступательное движение, называется ползуном (поршень 3,5, см. рис.1.1). Звено, совершающее сложное плоскопараллельное движение, называется шатуном
(2,4, см. рис.1.1).
Все неподвижные детали образуют одну жёсткую неподвижную систему, называемую неподвижным звеном, или стойкой (звено 0, см. рис.1.1). Так, например, корпус двигателя, подшипники коленчатого вала и т.п. образуют одно неподвижное звено, или стойку. Следовательно, механизм можно рассматривать как совокупность неподвижного и подвижных звеньев.
1.2. Кинематические пары и их классификация
Соединение двух соприкасающихся звеньев, допускающее их относительное движение, называется кинематической парой. Любой механизм состоит из звеньев, соединенных между собой
x
|
|
А |
|
|
|
|
|
x |
|
x |
|
|
||
|
|
В |
|
В |
|
|
|
|
|
|
|
|
|
|
А
В
В
Вx
В
|
|
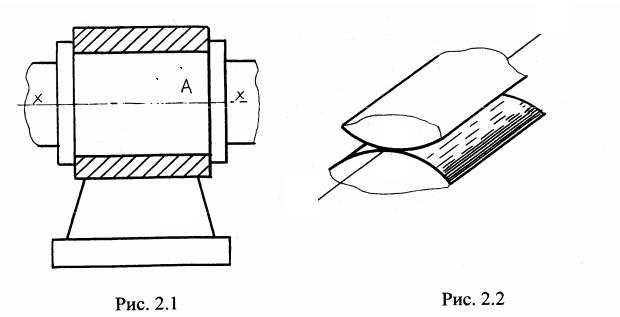
Рис. 1.3. Высшая кинематическая |
Рис. 1.2. Низшая вращательная |
|
|
кинематическая пара |
|
пара |
|
|
|
|
|
|
кинематическими парами. Возможные подвижные соединения звеньев весьма разнообразны. Например, на рис.1.2 показана так называемая вращательная кинематическая пара, в которой соединение звеньев А и В образуется двумя цилиндрами, находящимися в постоянном соприкосновении.
На рис.1.3 изображен другой способ соединения двух звеньев А и В. Эта пара допускает относительное перекатывание, скольжение или верчение.
Таким образом, на относительное движение каждого звена кинематической парой накладываются ограничения, зависящие от способа соединения звеньев в пары. Эти ограничения называются числом
45
условий связи S. Рассмотрим теперь, какие же связи и в каком количестве могут быть наложены на относительное движение звеньев кинематической парой.
Для абсолютно твердого тела, свободно движущегося в пространстве, число независимых параметров, определяющих его положение в пространстве или число степеней свободы, равно шести: три возможных перемещения вдоль неподвижных координатных осей и три возможных вращения вокруг этих осей. Для звеньев, вошедших в кинематическую пару, число степеней свободы всегда меньше шести, так как кинематическая пара уменьшает число возможных перемещений и накладывает число условий связи S на относительное движение каждого звена, зависящих от способа соединения звеньев в пары. В таком случае число степеней свободы H кинематической пары равно
H = 6 − S. |
(1.1) |
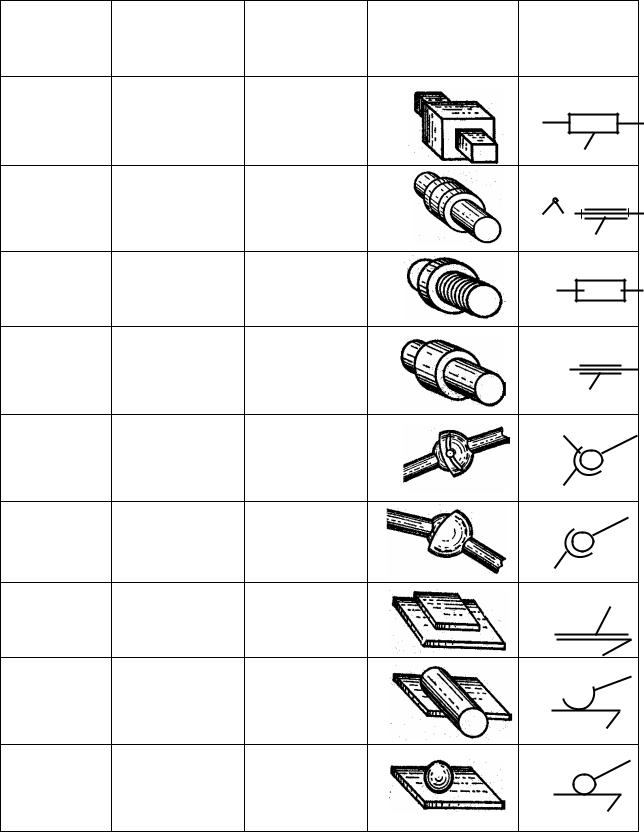
Все кинематические пары делятся на классы в зависимости от числа условий связи, налагаемых ими на относительное движение звеньев. Так как число условий связи может быть от одного до пяти, то число классов пар равно пяти. В соответствии с этим имеем кинематические пары I −V классов. Наиболее распространёнными являются одноподвижные пары, которые представлены в трёх вариантах
(табл.1.1).
В поступательной паре относительное движение её звеньев прямолинейно-поступательное, во вращательной паре – вращательное, и в винтовой − винтовое, т.е. перемещение вдоль и вокруг оси связаны между собой зависимостью. В таком случае число условий связи равно S = 6 – H = 6 – 1 = 5, т.е. эта пара пятого класса.
Двухподвижные кинематические пары представлены в двух вариантах: цилиндрическая пара и сферическая пара с пальцем (см. табл. 1.1) пары IV класса.
46
|
Типовые кинематические пары |
Таблица 1.1 |
|||
|
|
||||
Число |
Число условий |
|
|
Условное |
|
степеней |
Название пары |
Рисунок |
|||
связей |
обозначение |
||||
свободы |
|
|
|||
|
|
|
|
||
1 |
5 |
Поступательная |
|
|
|
|
|
|
|
||
1 |
5 |
Вращательная |
|
|
|
1 |
5 |
Винтовая |
|
|
|
|
|
|
|||
2 |
4 |
Цилиндрическая |
|
|
|
2 |
4 |
Сферическая с |
|
|
|
пальцем |
|
|
|||
|
|
|
|
||
3 |
3 |
Сферическая |
|
|
|
3 |
3 |
Плоскостная |
|
|
|
4 |
2 |
Цилиндр- |
|
|
|
плоскость |
|
|
|||
|
|
|
|
||
5 |
1 |
Шар-плоскость |
|
|
|
Трёхподвижная кинематическая пара, или пара III класса, показана также в двух вариантах: сферическая пара (шаровой шарнир) и плоскостная пара (см. табл. 1.1).
47
Четырёх - и пятиподвижные пары представлены вариантом "цилиндр - шар " и "шар - плоскость" (см. табл.1.1) – пары I и II классов соответственно.
Совокупность поверхностей, линий и отдельных точек звена, по которым оно может соприкасаться с другим звеном, образуя кинематическую пару, называется элементом кинематической пары. Кинематическая пара, в которой требуемое относительное движение звеньев может быть получено постоянным соприкосновением ее элементов по поверхности, называется низшей парой. К низшим парам относятся: вращательная, поступательная, винтовая, цилиндрическая, сферическая, плоскостная и т.п. Элементы высшей пары соприкасаются только по линии или в точке. К высшим парам относятся зубчатая, кулачковая и др.
Для того чтобы элементы кинематических пар находились в постоянном соприкосновении, они должны быть замкнуты. Замыкание может быть либо геометрическим, либо силовым.
1.3.Кинематические цепи. Механизм. Подвижность кинематических цепей и механизмов
Кинематической цепью называется система звеньев, связанных между собой кинематическими
парами.
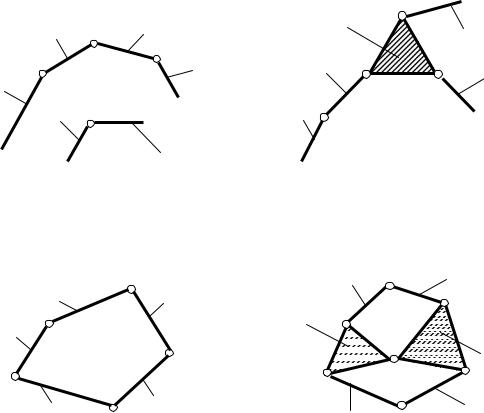
Кинематические цепи делятся на простые и сложные. Простой кинематической цепью называется такая, у которой каждое звено входит не более чем в две кинематические пары (рис.1.4,а). Сложной кинематической цепью называется цепь, в которой имеется хотя бы одно звено, входящее более чем в две кинематические пары (рис.1.5).
Простые и сложные кинематические цепи, в свою очередь, делятся на замкнутые и разомкнутые. Замкнутой кинематической цепью называется кинематическая цепь, звенья которой образуют один или несколько замкнутых контуров (рис.1.6, 1.7).
Незамкнутой кинематической цепью называют такую, в которой имеются звенья, входящие только в одну кинематическую пару (см. рис.1.4, 1.5).
Простейшая незамкнутая цепь является двухзвенной (рис.1.4,б).
По различиям в расположении траекторий точек звеньев различают пространственные и плоские кинематические цепи.
В пространственных кинематических цепях траектории точек звеньев являются пространственными кривыми или плоскими, но расположенными в непараллельных плоскостях. В плоских цепях точки звеньев описывают траектории, лежащие в параллельных плоскостях.
48
Механизм − это кинематическая цепь, в которой при заданном движении одного или нескольких звеньев относительно одного из них все остальные звенья совершают однозначно определяемые движения.
Ведущим звеном называется звено, для которого сумма элементарных работ внешних сил, приложенных к нему, является положительной. Ведомым звеном называется звено, для которого сумма элементарных работ всех внешних сил, приложенных к нему, является отрицательной или равна нулю.
Входное звено может быть как ведущим, так и ведомым. То же относится и к ведомому звену.
а) |
2 |
3 |
3 |
4 |
|
1 |
4 |
2 |
5 |
|
|
|
||
|
|
|
|
|
|
1 |
|
|
|
|
|
б) |
|
|
|
|
2 |
|
|
Рис. 1.4. Простые разомкнутые |
Рис. 1.5. Сложная разомкнутая |
||
кинематические цепи |
кинематическая цепь |
||
2 |
|
1 |
2 |
3 |
|
|
|
|
|
|
|
1 |
|
6 |
|
|
|
|
3 |
5 |
4 |
5 |
4 |
|
|
|
|
Рис. 1.6. Простая замкнутая |
Рис.1.7. Сложная замкнутая |
||
кинематическая цепь |
кинематическая цепь |
|
|
В зависимости от вида кинематической цепи механизмы делятся на плоские и пространственные.
Чтобы изучить движение механизма, недостаточно знать его структуру, необходимо также знать размеры отдельных звеньев, взаимное положение звеньев. Поэтому при изучении движения звеньев механизма обычно составляют так называемую кинематическую схему механизма. Кинематическая схема механизма строится в выбранном масштабе с точным соблюдением всех размеров и форм (см.
рис.1.1).
Если на движение звена в пространстве не наложено никаких условий связи, то оно обладает шестью степенями свободы. Тогда если число звеньев кинематической цепи равно к, то общее число степеней свободы, которым обладают к звеньев до их соединения в кинематические пары, равно 6к. Соединение звеньев в кинематические пары накладывает различное число условий связи S на относительное движение звеньев, зависящее от класса пар.
Если число пар I класса, в которые входят звенья рассматриваемой кинематической цепи, равно р1, число пар II класса – р2, число пар III класса – р3, число пар IV класса – р4, число пар V класса – р5, то из 6к степеней свободы, которыми обладали звенья до вхождения в кинематические пары, необходимо исключить те степени свободы, которые отнимаются вхождением звеньев в кинематические пары. Тогда число степеней свободы Н кинематической цепи равно
49