

2164
.pdfSK |
JS |
|
, а так как a |
|
sin a |
|
|
JS |
, |
|
|
S |
S |
|
|||||||
m aS |
sin |
|||||||||
|
|
|
|
m lAS |
||||||
то расстояние от оси вращения до точки Κ определится по формуле
lАК lАS |
JS |
. |
|
m lAS |
|||
|
|
Следовательно, инерционное воздействие тела, вращающегося неравномерно вокруг оси, не проходящей через центр массы, может быть сведено к одной силе, по величине равной произведению массы тела на ускорение центра массы, условно приложенной в точке Κ и направленной в сторону, противоположную ускорению центра массы.
3.5.2. Инерционное воздействие тела, совершающего сложное движение
Инерционное воздействие в этом случае будет зависеть от того, какую точку звена приняли за полюс.
На рис. 3.8,а за полюс принята точка А, т.е. тело совершило поступательное движение вместе с точкой А, сила инерции в этом случае будет определяться по формуле FИ m аА и вращательное движение вокруг точки А.
Сила инерции во вращательном движении FИ m аА, момент от сил инерции МИ JS ε.
Если за полюс будет принята точка Β (рис.3.8,б), то инерционное воздействие и в том случае будет состоять из трех величин:
FИ m aВ – в поступательном движении; FИ m aS ; ΜИ JS ε – во вращательном.
Если за полюс будет принята точка, совпадающая с центром массы (рис. 3.8,в), то инерционное воздействие сведется только к двум величинам:
FИ m aS – в поступательном движении и ΜИ JS ε – во вращательном.
Величина силы инерции во вращательном движении вокруг центра массы будет равна нулю, так как lAS 0 и
aS lAS 
 4 2 0.
4 2 0.
90

В |
В |
В |
В |
|
В |
В |
В |
В |
S |
S |
S |
S |
S |
S |
S |
|
S |
|
|
|||||||
А |
|
А |
А |
А |
А |
А |
А |
А |
а) |
|
|
|
б) |
|
|
в) |
|
Рис.3.8. Схема расчета инерционного воздействия тела, совершающего сложное движение
3.5.3. Расчет сил инерции способом замещающих масс
Вместо приведения всех сил инерции звена к силе и паре сил в некоторых случаях удобно заменить эти усилия силами инерции масс, сосредоточенных в определенных точках или, как их называют, в замещающих точках. Такая замена возможна, если в результате ее инерционное воздействие тела не изменится.
Чтобы инерционное воздействие не изменялось, необходимо, чтобы сумма размещенных масс равнялась массе тела до размещения:
mi m,
аточка приложения равнодействующей сил инерции размещенных масс совпала бы с центром массы до размещения.
91

у |
|
у |
|
Rw |
|
А |
R |
Ми |
|
уА |
|
|
|
||
|
|
|
|
S |
хв |
S хс |
х |
х |
|
хА |
|
|
|
|
|
|
В |
ус |
С |
|
|
||
|
|
|
|
|
|
ув |
|
Рис.3.9. Схема расчета сил инерции
Этому условию удовлетворяют следующие два равенства:
mi Хi 0;
miУi 0,
т.е. сумма статических моментов размещенных масс относительно осей У и Х равняется нулю.
Кроме того, необходимо, чтобы момент сил инерции до размещения и сумма моментов сил инерции размещенных масс были равны (рис. 3.9):
ΜИ МИ А МИВ МИС ,
или
JS mA ХА2 УА2 mВ ХВ2 УВ2 mС ХС2 УС2 .
Угловое ускорение для всех точек есть величина постоянная. Отсюда
mA ХА2 УА2 mВ ХВ2 УВ2 mС ХС2 УС2 JS .
Таким образом, замена возможна, если будут выполнены следующие условия:
mi m;
mi Хi 0;
92

miУi 0;
mi Хi2 Уi2 JS .
Первые три равенства обеспечивают статическое условие размещения массы, все четыре – динамическое.
Если звено имеет симметрии, то из второго и третьего равенств останется только одно:
1.mi 0;
2.mi Хi 0;
3. mi Хi2 JS .
|
l |
|
в |
|
а |
В |
S |
А |
Рис. 3.10. Схема размещения масс в кинематическихпарах
В технических расчетах часто пользуются приближенным способом размещения масс, помещая их в кинематических парах. В этом случае выполняется статическое условие размещения массы, т.е. выполняются первые два равенства
(рис.3.10).
mА mВ m; |
mАa mВв 0 |
||||
и |
|
|
|
||
mА |
m в |
; |
mВ |
m a |
. |
|
|
||||
|
l |
|
l |
||
Силы инерции получатся в результате умножения масс на соответствующие ускорения, взятые с планов ускорений.
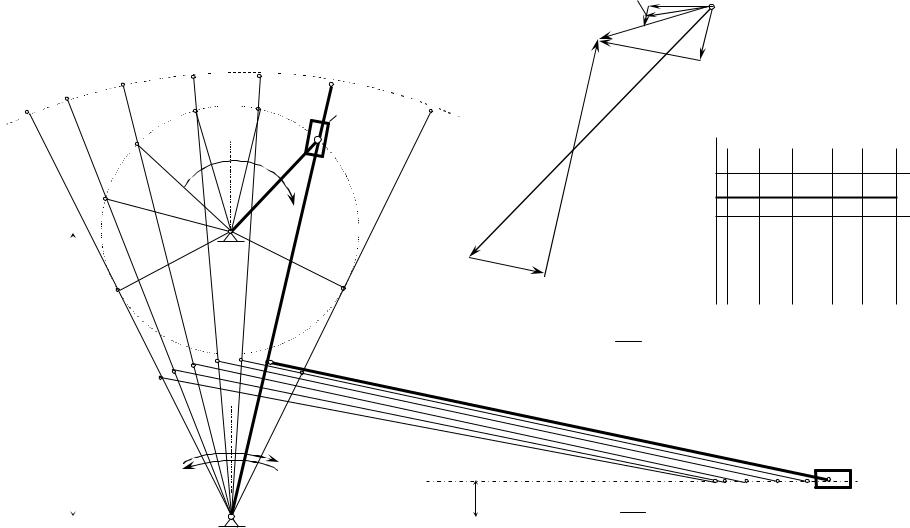
Пример. Требуется выполнить кинетостатический расчет кривошипнокулисного механизма транспортера (рис. 3.11).
Исходные данные:
а) схема механизма (рис. 3.11,а); б) данные для силового расчета (табл. 3.1);
в) внешние силы. Диаграмма сил сопротивления (см. рис. 3.11,в); г) результаты кинематического расчета.
93
Таблица 3.1
Результаты расчета
№ |
|
m2, |
m4, |
|
m5, |
|
m6, |
|
JAs, |
JS4, |
|
|
JS5, |
Z1 |
|
Z2 |
Fc |
|
поло- |
|
|
|
|
|
|
|
max, |
||||||||||
|
кг |
кг |
|
кг |
|
кг |
|
кгм2 |
кгм2 |
|
кгм2 |
|
||||||
жения |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Н |
5 |
|
80 |
60 |
|
30 |
|
30 |
|
1,6 |
1,0 |
|
|
1,2 |
20 |
|
70 |
900 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Структура механизма: |
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
1,2 |
|
|
3,4 |
|
|
|
|
5,6 |
|
|
|
||
|
|
|
|
|
исх.мех |
Гр.Пкл.3вида |
Гр.Пкл.2вида |
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|||||||||
ОПРЕДЕЛЕНИЕ РЕАКЦИЙ В КИНЕМАТИЧЕСКИХ
ПАРАХ ГРУППЫ 5–6
Рассматриваем равновесие группы звеньев 5–6 (рис. 3.12,а):
G5 + G6 + Fc max + Fи5 + Fи6 + F16 + F45z + F45n = 0
где G5 – сила тяжести шатуна звена 5,
G5 = m5q = 30 9,81 =294 H;
G6 – сила тяжести ползуна звена 6,
G6 = m5q = 30 9,81 =294 H;
Fи6 – сила инерции ползуна по модулю,
Fи6 = m6aF =30 0,88 = 24H;
F16 – реакция направляющей ползуна на ползун 6. Неизвестна по величине. Направление совпадает с перпендикуляром к линии движения ползуна;
Fс max – расчетная величина силы сопротивления при рабочем ходе;
Fи6 – сила инерции шатуна по модулю;
Fи5 m5aS5 m5 ws5 a 30 11 0,065 21,4H.
94

Эта сила приложена в центре массы шатуна и направлена в сторону, противоположную ускорению этой же точки. Кроме силы Fи5на шатун действует еще и момент сил инерций Ми5. По модулю
Ми5 = Js5 ε5 = 1,2 0,5 = 0,6H∙м.
Момент направлен в сторону, противоположную угловому ускорению шатуна.
F45 – реакция кулисы 4 на шатун 5. На схеме (рис. 3.12,а) предполагаемое направление F45
разложено на перпендикулярное шатуну F45 и параллельное F45n . Тангенциальная составляющая F45
определяется из суммы моментов сил, действующих на шатун относительно точки F.
МF 0;Mи5 Fи5h2 F45l5 G5h5 0;
Mи5 Fи5 h2 S F45 h5 S 0.
Плечи h2 ,h1 иl5 можно замерить на схеме (см. рис. 3.12,а). |
|||||
|
|
|
|
|
|
|
|
h 2 25мм; h1 |
57мм;l 120мм. |
||
|
|
|
|
|
|
F |
|
GS h1 S Mи5 Fи5 h2 S |
|
||
|
|||||
45 |
|
|
|
|
|
l5 S
294 57 0,004 0,6 24 25 0,004 134H. 120 0,004
В результате построения плана сил (рис. 3.12,г) получим реакции F16
и F45.
F16 F16 46 15 690H;
F45 F45 46 15 690H.
ОПРЕДЕЛЕНИЕ РЕАКЦИЙ В КИНЕМАТИЧЕСКИХ ПАРАХ ГРУППЫ 3–4
Рассмотрим равновесие группы звеньев 3–4 (см. рис. 3.12,б):
G4 + Fи4+F23 + F54 + F14 = 0,
где G4 – сила тяжести кулисы,
G4 = m4q=60 9,81=588,6H;
F54 – реакция шатуна 5 на кулису 4.
Величина равна F45, направление противоположно;
F14 – реакция стойки на кулису, величина и направление неизвестны; Fи4 сила инерции кулисы, по модулю
Fи4 m4 ws4 60 14,5 0,065 56,5H.
Точка приложения силы инерции к, с учетом действия момента сил инерции, определится по формуле
95

l |
ДК |
l |
ДS |
|
Js4 |
0,22 |
1,0 |
0,295м. |
|
|
|
||||||||
|
|
4 |
m l |
ДS4 |
60 0,22 |
||||
|
|
|
|
|
4 |
|
|
||
Направление противоположно ускорению центра массы.
F23 – реакция кривошипа на ползун 3. Направление совпадает с перпендикуляром к кулисе. Величину можно найти из суммы моментов относительно точки Д.
М Д 0;G4h2 Fи4h1 F23lДВ F54h 0.
Плечи h2 ,h1,h замерены на схеме.
|
|
|
|
|
|
||
h2 |
10мм;h1 64мм;h 50мм;lДВ 100мм. |
||||||
|
|
|
|
|
|
|
|
|
F |
F54 h S G4 h2 S Fи4 h1 S |
|
||||
|
|
|
|||||
|
23 |
|
|
|
|
|
|
|
|
|
|
l ДВ S |
|
|
|
|
|
690 50 588,6 10 56,5 64 |
250H. |
||||
|
|
||||||
|
|
|
|
100 |
|
|
|
|
|
|
|
|
|
|
|
|
|
F14 F14 |
43 15 645H. |
||||
ОПРЕДЕЛЕНИЕ РЕАКЦИЙ В КИНЕМАТИЧЕСКИХ ПАРАХ ИСХОДНОГО МЕХАНИЗМА
Рассмотрим равновесие группы 1–2 (см. рис. 3.12,в):
F32 + G2 + F12 + FУР = 0,
где F32 – реакция ползуна 3 на кривошип. По величине равна F23 и противоположна по направлению. G2 – сила тяжести кривошипного колеса,
G2 = m2q = 80·9,81=785H.
F12 – реакция стойки на кривошип (подшипника на вал колеса). Величина и направление неизвестны.
FУР – уравновешивающая сила – реакция зуба отброшенной шестерни с числом зубцов Z1. Направление совпадает с линией зацепления. Величину и истинное направление можно определить из суммы моментов относительно точки А.
Плечи h и h1 можно замерить на схеме (см. рис. 3.12,в).
h20,5мм;h 32мм.
FУР h1 F32 h;
FУР F32 h 25020,5 160H. 32
h
Таблица 3.2
Результаты расчета
96
№ |
F12,H |
F16,H |
F14,H |
F45,H |
F23,H |
FУР,H |
МУР, Н∙м |
положе- |
|||||||
ния |
|
|
|
|
|
|
|
5 |
795 |
645 |
690 |
690 |
250 |
160 |
15,4 |
|
|
|
|
|
|
|
|
Уравновешивающий момент можно определить по уравновешивающей силе.
MУР FУР h1 S 120 32 0,004 15,4H м.
Реакция F12 определяется из плана сил (см. рис. 3.12,е).
F12 F12 53 15 795Н.
Результаты расчетов заносим в табл. 3.2.
97
s5
в4 е s4l
|
|
|
|
|
|
С |
|
|
|
|
|
|
3 |
|
4 |
3 |
|
|
|
|
|
|
|
|
|
|
|
||
|
2 |
|
|
|
|
В (В4) |
|
|
|
|
1 |
|
|
|
|
2 |
|
а в4в |
|
|
|
|
|
|
|
|
|
|
|
|
0 |
|
А |
|
|
в |
|
б) |
|
|
|
|
|
|
|
|
|||
57 |
|
|
|
|
|
ак |
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
4 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
р |
30 Н |
|
l |
0 |
2 |
3 |
4 |
5 |
Е |
|
мм |
|
1 |
|
|
|
|
|
|
|
||
3 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
4 |
|
|
|
|
|
|
|
|
|
1 |
|
|
м |
|
|
|
|
|
|
l |
0,004 |
||
|
|
|
|
Д |
|
s |
|||
|
|
|
|
|
|
|
|
|
мм |
f
W |
|
мс 2 |
|
а |
0,065 |
||
мм |
|||
п4 |
|
Fср, кН
0,9
0,6
0,3 |
|
|
|
|
|
|
|
|
|
|
|
0 |
|
|
|
|
SЕ,м |
|
0,08 |
0,12 |
|
||
0,04 |
|
|
|||
в)
F
0 1 |
2 |
3 |
4 |
5 |
а) |
Рис. 3.11. Кинематический расчет кривошипно-кулисного механизма: |
а – схема механизма; б – данные для расчета; в – диаграмма сил сопротивления |
98

59
С
3
h2
К
Е S4
F54
G4
h
F14 4
Д
б)
В
F23
Fи4
N
s 0,004
м
мм
h1
 F45τ
F45τ
F45п Е 5
а)
|
|
р |
30 |
Н |
|
|
|
|
|
|
мм |
|
|
|
|||
|
|
|
|
|
|
|
||
|
|
В |
|
|
Fс |
|
|
|
|
F32 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
G4 |
|
|
F16 |
||
|
|
|
|
|
|
|
||
|
А |
h |
|
|
|
|
|
п |
|
|
Fи5 |
|
|
||||
F12 |
|
|
|
|
||||
|
|
|
|
|
|
|
F45 |
|
|
G2 |
|
|
|
G5 |
|
τ |
|
|
|
|
|
|
Fи6 |
F45 |
||
Fур |
h1 |
Z2 |
|
|
|
|
F45 |
|
|
|
|
|
р |
15 |
Н |
|
|
|
|
|||
|
|
|
|
мм |
||
|
|
O1 |
α |
|
||
|
в) |
|
|
N |
|
|
|
|
|
Z1 |
|
|
|
G4
Ми5
ε5
|
|
Fи5 |
|
|
|
S5 |
|
|
F16 |
h |
|
|
|
F |
|
||
|
G5 |
Fс |
|
||
|
|
6 |
Fи6 |
||
|
|
||||
|
|
|
|||
|
|
h1 |
|
||
|
|
G6 |
|
||
|
|
|
|
||
|
|
|
|
|
|
Рис. 3.12. Схемы расчета
F54
F14
F23 Fи4
F32
G2
F12
Fур е)
99