

2164
.pdfН = 6к - 5р5 - 4р4 - 3р3 - 2р2 – р1. |
(1.2) |
Формула (1.2) − это формула подвижности или структурная формула кинематической цепи общего вида.
При изучении движения механизма рассматриваем абсолютные перемещения, происходящие относительно одного из звеньев, принятого за неподвижное (стойку). Так как одно звено неподвижно, то число степеней свободы цепи уменьшится на шесть и число степеней свободы W механизма относительно неподвижного звена будет равно
W = H – 6 или W = 6(к-1) - 5p5 - 4p4 - 3p3 - 2p2 – p1
или
W = 6n -5p5 - 4p4 - 3p3 - 2p2 – p1, |
(1.3) |
где n − число подвижных звеньев кинематической цепи. Формула (1.3) носит название формулы подвижности, или структурной формулы механизма общего вида.
Если механизм обладает одной степенью свободы, то одному из звеньев механизма можем предписать относительно стойки какой-либо определенный закон движения (одну обобщенную координату механизма), например вращательное, поступательное или винтовое движение с заданными скоростями. При этом все остальные звенья механизма получат вполне определенные движения, являющиеся функциями заданного. Если механизм обладает двумя степенями свободы, то необходимо задать одному из звеньев два независимых движения (две обобщенные координаты механизма) относительно стойки или двум звеньям по одному независимому движению относительно стойки.
Обобщенными координатами механизма называют независимые между собой координаты, однозначно определяющие положение всех звеньев механизма относительно стойки. Например, в кривошипно-ползунном механизме (см. рис.1.1) за обобщенную координату можно принять угол поворота кривошипа 1, так как положение звена 1, определяемое этим углом, определяет также положение всех других подвижных звеньев. Звено, которому приписывается одна или несколько обобщенных координат, называется начальным. Начальное звено не всегда совпадает с входным звеном. Например, в механизме (см. рис.1.1) начальным звеном является кривошип 1, а входным звеном является поршень 3 или 5.
50

Для определения числа степеней свободы механизма достаточно
|
а) |
|
б) |
|
В |
3 |
В |
2 |
С |
С |
|
|
||
|
|
|
||
2 |
4 |
1 |
|
3 |
5 |
|
|||
Е |
|
1 |
|
|
|
F |
|
Д |
|
|
А |
|
|
А
 Д
Д
1 |
2 |
3 |
|
|
С |
В |
А |
Д |
1 |
1 |
|
Рис. 1.8. Шарнирный параллелограмм с избыточной связью (а), шарнирный четырехзвенник без избыточной связи и его крайнее положение (б)
найти общее число координат, определяющих положение всех звеньев механизма, и число уравнений, связывающих эти координаты.
Дополнительные требования существенно изменяют характер движения механизма и соответственно вид структурной формулы. Пусть, например, у механизма (рис.1.8), который состоит из кинематических пар пятого класса р5 = 4 (А,В,С,D), оси всех пар параллельны. Выберем неподвижную систему координат x y z так, чтобы ось x совпала с направлением осей пар, в результате получим плоский механизм, т.е. механизм, точки звеньев которого описывают траектории, лежащие в параллельных плоскостях. В таком случае звенья механизмов не могут совершать вращательное движение вокруг осей y и z и поступательное движение вдоль оси х, т.е. из шести возможных движений три не могут быть осуществлены. Так как три связи уже наложены условием параллельности осей, структурная формула будет такой:
W = (6-3)n - (5-3)p5 - (4-3)p4 - (3-3)p3,
или |
W = 3n - 2p5 – p4. |
(1.4) |
Формула (1.4) есть структурная формула для плоских механизмов общего вида.
В состав плоских механизмов пары I, II и III классов входить не могут, как обладающие пространственным характером возможных относительных движений. Из рассмотренного примера следует, что если на движение всех звеньев механизма в целом наложено некоторое общее для всего механизма число связей, то необходимо число этих общих связей из структурной формулы механизма (1.3) исключить путем вычитания числа этих связей из числа степеней свободы всех подвижных звеньев механизма и из числа условий связи всех входящих в механизм кинематических пар. По наличию общих условий связи определяется семейство механизмов.
Необходимо отметить, что, кроме степеней свободы и связей, активно воздействующих на характер движения механизмов, в них могут встретиться степени свободы и условия связи, не оказывающие никакого влияния на характер движения механизма в целом. Такие степени свободы называются лишними степенями свободы, а связи – избыточными или пассивными. На рис. 1.8,а показан механизм параллельных кривошипов с дополнительным шатуном 5. Подсчет подвижности по формуле
(1.4) дает
W = 3 4 – 2 6 = 0,
51

т.е. кинематическая цепь в общем случае представляет ферму с нулевой подвижностью. Однако если длины звеньев EF = BC = AD, а AE = DF и BE = FC, то наличие звена 5 не изменит движения шарнирного четырехзвенника ABCD, исключающего W = 1.Поэтому связь EF и называют избыточной.
Врассматриваемом механизме дополнительный шатун EF позволяет устранить лишнюю степень свободы в случае, когда при движении в этом механизме три центра вращения (постоянные или мгновенные) попадают на одну прямую (рис.1.8,б). В данном положении ведомое звено 3 может вращаться как в прямом, так и обратном направлениях.
Вдвигателях внутреннего сгорания находят широкое применение кулачковые механизмы (рис.1.9). В этом плоском механизме n = 3, p5 = 3 и p4 = 1 (вращательные пары в центрах О, В и С, образуемые звеньями 0 −1, 2 –3, 3 – 0). По формуле (1.4)
W = 3 3 – 2 3 – 1 = 2.
Однако если искать положение только звена 3, то можно заметить, что это положение определяется только положением звена 1 (кулачка). Нетрудно видеть, что ролик 2 может свободно поворачиваться вокруг оси В, не оказывая никакого влияния на характер движения механизма в целом.
При подсчете степени подвижности лишние степени свободы и пассивные связи следует отбросить.
 2
2
В
 3
3
С
0
О
1
0
Рис.1.9. Схема кулачкового коромыслового механизма с роликом
1.4. Образование плоских механизмов
Основной принцип образования механизмов был впервые сформулирован в 1914 г. русским ученым Л.В.Ассуром.
Он состоит в следующем. Схема любого механизма может быть составлена последовательным присоединением к начальному звену (к начальным звеньям) группы звеньев с нулевой степенью подвижности относительно тех звеньев, к которым группа присоединяется.
Начальное звено и стойку, образующие кинематическую пару V класса, называют механизмом I класса (см. рис.1.10,а). Механизм должен иметь число начальных звеньев, равное числу его степеней свободы. В нашем примере (см. рис. 1.1) механизм обладает одним начальным звеном, т.к. степень свободы механизма согласно (1.4) равна 1. В целом группа начальных звеньев со стойкой образует исходный механизм. Группы звеньев с нулевой подвижностью носят названия групп Ассура.
Группой Ассура будем называть кинематическую цепь с нулевой степенью свободы относительно тех звеньев, с которыми входят в кинематические пары свободные элементы ее звеньев, и не распадающуюся на более простые цепи, обладающие также нулевой степенью свободы. Таким образом, механизм можно представить в виде следующей блочной структуры:
Механизм= |
|
Группа начальных |
+ |
|
Группа Ассура |
+ |
Группа Ассура |
|
+ + |
|
Wгр = 0 |
Wгр = 0 |
|||
|
|
звеньев W = Wмех, |
|
|
|
||
|
|
механизм I класса |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
52 |
|
|
|

Для плоских механизмов, звенья которых образуют пары IV и V классов, группа Ассура отвечает условию
Wгр = 3n – 2р5 – р4 = 0. |
(1.5) |
Входящие в состав плоского механизма высшие кинематические пары IV и V классов могут быть условно заменены кинематическими цепями, образованными только парами V класса.
При замене должны соблюдаться:
структурная эквивалентность замены;
кинематическая эквивалентность замены.
|
|
С |
1 |
|
С |
|
φ |
3 |
ω1 |
|
|
|
3 |
|
|
А |
|
|
|
|
а) |
2 |
2 |
|
||
|
|
|
В |
|
5 |
б) |
Д |
|
||
|
В |
|
|
|
А
3 Д
В
 2
2
4
г)
Е
Рис. 1.10. Примеры структурных групп звеньев с нулевой подвижностью
Если принять р4 = 0, то соотношение звеньев и пар в группе
|
р5 = 3n / 2. |
|
(1.6) |
|||
3 |
|
|
|
0 |
Простейшая кинематическая цепь |
|
|
|
|
(рис. 1.10,б), удовлетворяющая |
|||
С |
|
|
|
|
||
|
|
|
|
условию (1.6) |
и имеющая два |
|
|
|
|
|
|||
|
|
|
|
|
||
|
|
|
|
|
звена и три пары V класса, |
|
|
2 |
|
называется двухповодковой груп- |
|
|
|
|
||
|
|
1 |
пой, или группой II класса. В ней |
|
4 |
В |
одна из вращательных пар С |
||
|
||||
5 |
|
α1 |
(внутренняя) образуется звеньями |
|
Д |
ω |
|||
|
|
группы 2 и 3, а две другие В и Д |
||
|
1 |
|
||
|
|
(внешние) образуются после |
||
|
А |
0 |
||
0 |
|
присоединения звеньев группы 2 и |
||
|
|
|||
Рис. 1.11. Кинематическая схема |
3 к каким-либо двум звеньям |
|||
|
||||
механизма двухцилиндрового компрессора |
|
|||
|
|
53 |
|
|
механизма. Двухповодковые группы могут быть разных видов, так на рис.1.10,в показана группа с внешней поступательной парой. В примере (рис.1.11) двухповодковая группа, состоящая из звеньев 2, 3, одной внешней парой В присоединяется к начальному звену 1, а другой парой С к стойке 0. Двухповодковая группа, состоящая из звеньев 4 и 5, присоединяется к начальному звену 1 парой V класса В и к стойке 0 парой V класса D. В результате имеем шестизвенный механизм двухцилиндрового, трехступенчатого компрессора АК-150H.
Вторым возможным сочетанием чисел звеньев и кинематических пар, образующих группу Ассура, согласно условию 1.6, является четыре подвижных звена и шесть пар V класса.
Кинематическая цепь (рис. 1.10,г) состоит из базисного звена 3, к которому присоединяются звенья 2, 4 и 5. Данная незамкнутая кинематическая цепь будет группой III класса.
Класс механизма определяется по наличию групп Ассура наивысшего класса. Механизмы, в состав которых входит хотя бы одна группа III класса, называются механизмами III класса.
Пример. На рис.1.1 показан кривошипно-ползунный механизм V - образного двигателя внутреннего сгорания В-84. Требуется определить подвижность механизма и его класс.
Структура механизма такова. Кривошип 1 входит во вращательную пару пятого класса А со стойкой 0. Шатун 2 входит во вращательную пару пятого класса В с кривошипом 1 и во вращательную пару пятого класса D с ползуном 3. Ползун 3 входит в поступательную пару пятого класса D с цилиндром, жестко связанным со стойкой 0. Далее прицепной шатун 4 входит во вращательную пару С пятого класса с шатуном 2, а также во вращательную пару Е пятого класса с ползуном 5. Ползун 5 входит в поступательную пару пятого класса Е с цилиндром, жестко связанным со стойкой 0. Следовательно, механизм состоит из пяти звеньев, пяти вращательных пар пятого класса и двух поступательных пар пятого класса: n = 5 (1, 2, 3, 4, 5), p5 = 7 (А, В, D, D, С, Е, Е). Степень свободы (подвижность механизма) определяется следующим образом: W = 3n–2р5 – р4 = 3·5 - 2·7 – 0 = 1.
Следовательно, механизм обладает одной степенью свободы и имеет одно начальное звено. За начальное звено принимаем, например, кривошип 1 (рис.1.12,а), положению которого соответствует обобщенная координата − угол поворота 1. В данном механизме начальное звено 1 не совпадает с входным звеном 3 или 5.
54

Механизм должен быть определен как механизм II класса, так как он образован двумя группами II класса (рис. 1.12,б,в). Если за начальное звено принять ползун 3 (рис. 1.12,г), то механизм должен быть также отнесен к механизмам II класса, так как он образован двумя группами II класса, из которых первая группа образована звеньями 4 и 5 (рис. 1.12,д), входящими в две вращательные пары пятого класса Е и С и одну поступательную пару пятого класса. Вторая группа образована звеньями 2 и 1 (рис. 1.12,е), входящими в три вращательные пары пятого класса А,В и D. При начальном звене 5 (рис. 1.12,ж), принимая звено 2 за тройное (базисное), механизм должен быть отнесен к механизмам III класса, так как
|
|
α1 |
|
|
|
|
|
|
ω1 |
|
|
|
|
Е |
|
|
|
|
|
|
|
5 |
|
|
2 |
|
1 |
А |
|
|
|
|
|
||
|
4 |
|
|
|
|
|||
|
а) |
|
|
|
|
|
|
|
|
|
|
С |
|
б) |
в) |
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
В |
|
Д |
|
|
|
|
|
|
|
|
3 |
|
|
|
|
Д |
|
А |
|
|
|
|
|
Е |
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
4 |
|
5 |
|
|
3 |
|
0 |
|
|
|
|
|
|
|
г) |
|
|
|
|
|
|
|
|
|
|
|
|
д) |
|
|
2 |
|
|
|
|
С |
|
|
|
||
|
|
3 |
|
|
|
|
|
|
Д |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
С |
|
|
|
|
|
Е |
|
|
В |
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
е) |
|
|
|
4 |
|
Е |
|
|
|
|
|
|
|
5 |
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
С |
|
|
|
0 |
|
|
В |
|
1 |
|
|
|
|
|
|
|
|
|
ж) |
|
|
||
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
Аз)
Рис. 1.12. К структурному анализу кривошипно-ползунного механизма двигателя внутреннего сгорания( см. рис. 1.1)
в этом случае звенья 1,2,3 и 4 образуют трехповодковую группу III класса. Звенья входят в пять вращательных кинематических пар А,В,С,D и Е и одну поступательную пару (рис. 1.12,з). В этом случае механизм в целом относится к механизмам III класса.
Класс механизма определяет методику кинематического и силового анализа механизма. С повышением класса механизма методики расчета усложняются, поэтому всякий раз нужно стремиться подбирать в качестве начального звена такое, при котором класс механизма будет как можно ниже.
По результатам структурного анализа составляется формула строения механизма. В рассматриваемом примере при начальном звене 1 она будет иметь следующий вид:
0,1 |
2,3 |
4,5 |
|
|
|
Iкл |
IIкл |
|
IIкл |
|
|
|
|
|
|
||
|
|
|
|||
|
|
|
|
|
|
55

при начальном звене 5 соответственно
0,5 (2),1,3,4
Iкл |
IIIкл |
. |
Компоненты этой формулы содержат в числителе номера звеньев, входящих в исходный механизм и в ту или иную группу с нулевой подвижностью, в знаменатель записывается класс группы.
Формула определяет последовательность расчета. Например, при кинематическом анализе от исходного механизма к последующим группам 2,3 и 4,5; при силовом расчете – в обратном направлении.
56
2. КИНЕМАТИЧЕСКИЙ АНАЛИЗ МЕХАНИЗМОВ
Кинематика, от греческого «kinetos» – движение, раздел механики, объединяющий направление моделирования и исследования механического движения вне зависимости от причин, вызывающих движение.
Следовательно, кинематика механизмов – искусственно созданных механических систем, состоящих из связанных тел (звеньев), относительное движение которых определяют связи, основана на моделировании движения только с учетом протяженности (размеров) звеньев и характера связей между ними.
При таком моделировании движения опускаются вещественность звеньев (масса и ее распределение по звену), силы и моменты сил, как вызывающие движение (внешние), так и силы (моменты сил), являющиеся следствием движения (инерционные), а связи моделируются как идеальные: исполнены абсолютно точно, в связях при относительном движении звеньев энергетических потерь нет.
Кинематическая модель механизма обычно предусматривает задание движения начальным звеньям, количество которых соответствует количеству обобщенных координат механизма (степени его подвижности), причем начальные движения, как правило, принимаются перманентными (непрерывными со стационарными параметрами движения).
Анализ кинематической модели механизма, при обозначенных допущениях, дает предварительный результат об абсолютных параметрах движения, вполне пригодный для определения силовых и энергетических характеристик механических систем, необходимых при последующих анализе и синтезе (проектировании) механизма по критериям прочности, жесткости, точности и ресурса.
Поскольку механизм по определению является механической системой, предназначенной для преобразования движения, т.е. системой, имеющей вход в форме входного движения и выход в форме выходного движения, то отношение параметров входного движения к параметрам выходного или наоборот составляет суть кинематического преобразования движения и называется передаточной функцией механизма, которая будет стационарной, независимой от времени. Значения передаточной функции составляют абсолютное знание, извлекаемое из кинематической модели механизма.
Передаточная функция имеет в качестве аргумента обобщенную (ые) координаты механизма и является кинематическим паспортом конкретного
57

механизма, она полностью характеризует трансформацию движения и циркуляцию силового потока в механизме.
Передаточная функция в общем случае имеет переменное по обобщенной координате значение, в частном же случае, например у ротативных систем, она постоянна, как это имеет место в редукторах и мультипликаторах, построенных на основе зубчатых, цепных и других центроидных передачах.
Аристотелю* принадлежит изречение: «Все, что относится к механическому движению, сводится к рычагу».
Любой механизм, как преобразователь движения, можно представить моделью рычага, плечи которого изменяются в соответствии со значением передаточной функции.
В любом механизме исполняется «золотое» правило механики – «сколько выигрываем в силе, столько проигрываем в скорости».
Кинематическое исследование, помимо определения передаточных функций механизма, позволяет получить информацию о траекториях движения любых точек, связанных с подвижными звеньями; о пространстве, занимаемом работающим механизмом, что позволяет конструировать корпусные детали и защитные ограждения.
Планы положений (разметка) механизма в функции обобщенной координаты представляют собой геометрическую основу математического моделирования движения и, кроме того, по планам методом геометрических мест можно определить предельные (крайние) положения механизма, величины рабочих перемещений исполнительных органов, местоположение мгновенных центров скоростей звеньев, совершающих сложное плоское движение и др.
Естественно, что кинематическое исследование дает исчерпывающую информацию о значениях и направлениях скоростей и ускорений (линейных и угловых) любых точек и звеньев при заданном** движении начальных звеньев.
2.1. Кинематические и передаточные функции механизма, их взаимная связь
Механическое движение определяется изменением координат точек изучаемой системы в функции времени. Линейные и угловые перемещения и их производныепо времени –скорости и ускорения–представляют собой кинематические параметры системы. Математические зависимости кинематических параметров от времени, записанные в форме уравнений, называют кинематическими функциями.
Поскольку механизм представляет собой механическую систему тел,
*Аристотель – грек, 384-322 г. д.н.э. – ученик Платона, воспитатель Александра Македонского, основателя58 статики, учения о рычаге.
**Здесь подчеркивается условность кинематической модели. Реально движение задавать нельзя, движение определяется не только связями, но и силами, его побуждающими и вещественными параметрами системы – массами звеньев и их распределением.
на движение которых наложены связи, то для описания и изучения движения целесообразно и полезно перейти от традиционных декартовых координат к обобщенным – определяющим конфигурацию системы. Количество обобщенных координат, как это отмечено в предыдущем разделе, совпадает со степенью подвижности механизма.
Математические зависимости кинематических параметров в функции от обобщенных координат, как уже отмечалось, получили название передаточных функций.
Рассмотрим примеры моделирования преобразования движения в плоских механизмах.
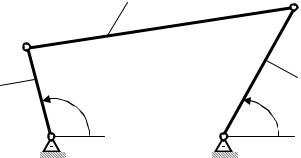
На рис. 2.1 приведена схема кривошипно-коромыслового механизма, предназначенного для преобразования перманентного вращательного
движения кривошипа ( 1 2 ) в возвратно-вращательное движение коромысла ( 3 2 ).
|
|
2 |
В |
|
|
|
|
|
А |
|
|
1 |
|
|
3 |
φ1 |
|
φ3 |
|
|
|
||
|
|
|
|
|
D |
|
С |
|
|
|
|
|
|
|
0 |
Рис. 2.1. Схема кривошипно-коромыслового механизма: 0 – стойка; 1 – кривошип; 2 – шатун; 3 - коромысло
Подвижность плоского механизма определим по формуле
W 3n 2P5 P4 , в нашем случае |
W 3 3 2 4 0 1. |
Примем в качестве обобщенной координаты 1 , тогда 3 может быть представлена в общем случае некоторой функцией положения
3 ( 1).
Передаточная функция П скорости в таком механизме будет такой:
П |
|
d 3 |
. |
|
|||
(2.1) |
|
d 1 |
|
|
|
|
|
59