

2164
.pdf7.2. Планетарные механизмы
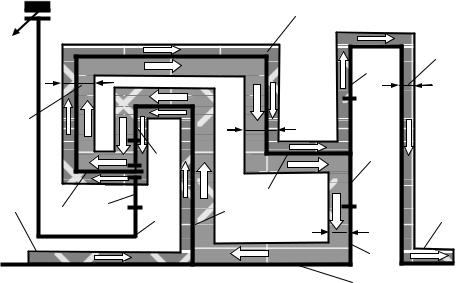
Рассмотрим дифференциальный эпициклический ряд (рис. 7.4). Предположим, что в ряду имеется q симметрично расположенных сателлитов, между которыми равномерно распределяется вращающий момент Мвщ, приложенный извне к солнечной шестерне. В полюсах зацепления W1, W2, W3 возникают силы нормального давления, приложенные к зубьям солнечной шестерни со стороны сателлитов. Разложив нормальное давление на окружное и радиальное, замечаем, что радиальные силы взаимно уравновешивают друг друга, окружные силы тоже дают главный вектор, равный нулю, а главный момент М окружных сил уравновешивает подводимый извне момент.
Из условия равновесия звена 1 имеем
Мвщ + М1 = О, т.е. М1 = -Мвщ, но М1 = qFtr.
Примем за положительный момент Мвщ, приложенный к ведущему валу, и найдём соотношения между внутренними моментами всех центральных звеньев ряда. По закону действия и противодействия получается, что во всех зацеплениях ряда действуют одинаковые окружные силы
Ft = M1 / r1.
Из условия равновесия сателлита Fbi = 0 получим
2Ft + Fоb = 0; Fоb = -2Ft, а Fbо = 2Ft.
Таким образом, к подшипникам сателлита, как и к подшипникам паразитной шестерни рядового механизма, приложена удвоенная окружная сила. Кроме того, при вращении водила на подшипники сателлитов действует дополнительная нагрузка, которую приходится учитывать как
центробежную силу сателлита (силу инерции).
Fu = -mв 012r01.
Суммарная сила на опоры сателлитов будет равна
Fb = Fоb + Fu.
Рассмотрим планетарный редуктор, у которого входным звеном является солнечная шестерня 1, выходным звеном – эпицикл 1', тормозным
–водило 01.
Втаком случае уравнение для данного механизма будет следующим:
|
М1 1 + М1' 1' = О; |
|
М1' = -M1 1/ 1'. |
Из уравнения кинематики при 01 = O получим 1 = -k1 1', |
|
т.е. |
1/ 1' = -k1. |
Тогда |
М1' = М1k1. |
160

1
Ft
2Ft Ft
Ft
2Ft
Ft |
Мвщ |
вщ
вщ Мвщ
Рис. 7.4. Схема нагружения планетарного механизма
Рассмотрим планетарный редуктор, у которого входным звеном является солнечная 1 шестерня, выходным – водило, тормозным – эпицикл.
Тогда уравнение для данного механизма будет
М1 1 + М01 01 = 0, М01 = -М1 1 / 01.
Учитывая, что эпицикл заторможен, находим
|
1 = (1+k1) 01, |
т.е. |
1/ 01 = 1+k1. |
Тогда |
М01 = -М1(1 + k1). |
7.3. Многорядные планетарные механизмы
Рассмотрим многорядный планетарный механизм, который имеет р планетарных рядов, содержащих каждый по три центральных звена (солнце, эпицикл, водило). Некоторые центральные звенья связаны с внешними валами (ведущим, ведомым, тормозными), а некоторые образуют внутренние междурядные связи. Задача кинетостатического анализа многорядных планетарных механизмов заключается прежде всего в определении внутренних моментов, действующих в рядах на центральные звенья механизма, а также внешних моментов, приложенных к ведомому валу и тормозным звеньям. Кроме того, в задачу кинетостатического расчёта входит оценка рационального распределения мощности, передаваемой отдельным звеньям механизма.
161
После определения внутренних моментов по известным радиусам зубчатых колёс вычисляются усилия в зацеплениях и определяются нагрузки на оси сателлитов.
Для определения неизвестных моментов составляется система уравнений, в которую входят:
–уравнения сохранения энергии рядов;
–уравнения равновесия концевых звеньев, связанных с ведущими, ведомым и тормозным звеньями;
–другие уравнения, к которым в зависимости от схемы многорядного механизма могут относиться:
–уравнения равновесия общих звеньев, не имеющих связей с концевыми валами, называемые уравнениями внутренних связей;
–уравнение для определения момента на ведомом валу для механизма в целом
Мвм = -u·Mвщ;
- уравнение равновесия для механизма в целом
Мвщ + Мт + Мвм = О.
Решение составленной системы начинают с того уравнения конечного звена, к которому приложено только два момента: внутренний и внешний. Если таким звеном не является ведущее, то предварительно нужно определить внешний момент по уравнению сохранения энергии для механизма в целом. Получим внутренний момент на концевом звене. Далее определяют остальные внутренние моменты в этом ряду, пользуясь уравнениями сохранения энергии для рядов в целом. Затем по одному из общих звеньев переходят в следующий ряд и так до тех пор, пока не определят все неизвестные моменты.
7.4. Распределение мощности в многорядных планетарных механизмах
Для оценки рациональности распределения мощности, передаваемой отдельными звеньями механизма, строится эпюра распределения мощности. Это название связано с представлением, что поток внутренней условной мощности, превышающей подводимую, как бы циркулирует по замкнутому контуру, не выходя из этого контура. Наличие значительной циркулирующей мощности нежелательно, так как это приводит к увеличению размеров и снижению КПД механизма. Однако совсем обойтись без циркулирующей мощности в многорядных планетарных коробках передач не удается, и она допускается на передачах, включаемых на короткое время.
К структурным признакам, сопутствующим передачам с замкнутой мощностью, относятся следующие:
162
–наличие между зубчатыми рядами замкнутого контура из общих и сопряженных звеньев;
–присутствие в замкнутом контуре передачи хотя бы одного общего звена, к которому приложено не менее трех моментов (включая внешние);
–разделение мощности на выходе из замкнутого контура на полезную и циркулирующую.
При оценке нагруженности звеньев используют схему передачи с разметкой функций звеньев и типа рядов.
По функциям центральные звенья могут разделяться на ведомые, ведущие и тормозные.
Если угловая скорость центрального звена совпадает с действием момента от внутренней силы, то это звено называется ведомым, в противном случае звено ведущее. Остановленное звено называется
тормозным.
По функциям звеньев определяется назначение рядов:
–планетарным называется ряд, в состав которого входит одно тормозное звено (солнечная или эпициклическая шестерня), одно ведущее
иодно ведомое звено;
–простым называется ряд, в состав которого входит одно тормозное звено (водило), одно ведущее и одно ведомое;
–дифференциально-суммирующим называется ряд, в состав которого входит два ведущих и одно ведомое звено;
–дифференциально-разделяющим называется ряд, в состав которого входит два ведущих и одно ведомое звено.
Вкачестве меры загруженности i-го сечения k-го подвижного звена
многорядного механизма принимается единичная мощность i:
i = Pi / Pвщ; Pi = Mi i,
где Мi – крутящий момент i-го сечения k-го подвижного звена.
В соответствии с величиной единичной мощности, пренебрегая величиной потерь, многорядные планетарные механизмы делятся на три группы:
равнозагруженные, у которых единичная мощность во всех сечениях подвижных центральных звеньев i=1;
разгруженные, у которых имеются подвижные центральные звенья с сечениями, где i<1, а в остальных сечениях i=1;
перегруженные, у которых имеются подвижные центральные
звенья с сечениями, где i>1, i=1, i<1.
Равнозагруженные механизмы состоят из открытых междурядных
контуров (пример последовательности соединения двух эпициклических рядов). В разгруженных и перегруженных механизмах обязательно имеются замкнутые контуры, все или некоторые. В любом замкнутом контуре хотя бы один ряд является дифференциальным, и тип этого ряда
163
определяет загруженность механизма. Если на входе в контур расположен разделяющий дифференциальный ряд или на входе суммирующий, то механизм относится к группе разгруженных. Если на входе в контур расположен суммирующий дифференциальный ряд, или на выходе – разделяющий, то механизм относится к группе перегруженных. В замкнутом контуре возникают весьма большие внутренние моменты и соответственно мощности. В перегруженных контурах на отдельных участках создаётся избыток мощности, так как она замыкается внутри контура, а на выходном валу получаем только подведенную мощность.
Пример. Произвести структурный, кинематический и кинетостатический расчеты планетарной коробки передач (см. рис. 6.2).
Таблица 7.1
Исходные данные
|
|
|
|
Планетарный ряд |
|
|
|
Модуль ,колесаm |
Число сателлитов |
Включен тормоз |
|||
Обозн. |
|
1 |
|
|
|
2 |
|
|
3 |
|
|||
|
|
|
|
|
|
|
|
|
|
||||
чисел |
|
|
|
|
|
|
|
|
|
|
|
|
|
зубьев |
z1 |
zb1 |
z1' |
|
z2 |
zb2 |
z2' |
z3 |
zb3 |
z3' |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Число |
38 |
14 |
66 |
|
46 |
17 |
80 |
14 |
26 |
66 |
5 |
2 |
Т1 |
зубьев |
|
||||||||||||
|
|
Угловая скорость ведущего вала ωвщ = 200 с-1 |
|
|
|
||||||||
7.4.1. Структурный анализ механизма
Степень свободы для планетарных механизмов определяется по следующей формуле:
W = 2p + 2 – λ = 2 3 + 2 – 6 = 2,
где р – число рядов; λ = 6 – число парных связей.
В данном планетарном механизме (см. рис. 6.2) имеется три планетарных ряда (р = 3), в состав которого входят пять центральных звеньев [вщ-1΄–2, 01–02–3΄, вм–2΄–03, 1, и 3]. Солнечная шестерня 1 и 3 не имеет парных связей. Она имеется между ведущим валом и эпициклической вщ–1΄ шестерней первого ряда, между эпициклической шестерней 1΄–2 первого ряда и солнцем второго ряда, имеется между водилом первого 01–02 и второго рядов, между водилом второго ряда и эпициклом 02–3΄ третьего ряда, между ведомым валом и эпициклом второго ряда вм–2΄, между эпициклом второго ряда и водилом третьего ряда 2΄–03.
Получается двухстепенной механизм, так как W=2 .Для данного механизма необходимо задать два закона движения, а именно: приводим в
164
движение ведущий вал с угловой скоростью вщ= 200с-1; включаем тормоз
Т1.
7.4.2. Аналитический метод кинематического анализа
Составляем систему уравнений.
Уравнения кинематики для рабочих рядов
В планетарном механизме (см. рис. 6.2) свободным звеном при включённом тормозе Т1 является звено 3, поэтому нерабочим является третий ряд, а первый и второй ряды являются рабочими. Итак, частная схема состоит из первого и второго рядов. Составляем уравнение
кинематики для указанных рабочих рядов:
1 = (1+k1) 01 - k1 1 ,
2 = (1+k2) 02 - k2 2..
Определяем характеристики планетарных рядов: k1 = z'1/z1 = 66 / 38 = 1,74; k2 = z'2/z2 = 80 / 46 = 1 74.
Уравнения постоянных и временных связей Ведущий вал имеет постоянную неподвижную связь с
эпициклической шестерней первого ряда и с солнечной шестерней второго
ряда. Данное сложное звено вращается с угловой скоростью
вщ = 1 = 2 = 200с-1.
Ведомый вал имеет постоянную неподвижную связь с эпициклической шестерней второго ряда. Данное сложное звено вращается с угловой скоростью
вм = 2 .
Включённый тормоз Т1 останавливает солнечную шестерню первого ряда. Угловая скорость данного звена равна 0.
1 = 0.
Водило первого ряда имеет постоянную неподвижную связь с водилом второго ряда. Данное сложное звено вращается с угловой скоростью
01 = 02.
Уравнение передаточного числа
u = вщ / вм.
Решая эту систему уравнений, находим угловые скорости звеньев и
передаточное число механизма:
вщ = 1 = 2 = 200с-1;
01 = (k1 вщ)/(1+k1) = 1,73·200/(1+1,73) = 126,73с-1;
165
0 = (1+k1) 01 - k1 вщ;вщ = (1+k2) 01 - k2 вм;
вщ - ((1+k2)k1 вщ)/(1+k1)= -k2 вм.
вщ |
1 k2 k1 вщ |
k2 вм; |
1 k |
||
|
1 |
|
u = вщ / вм =200 /85,05= 2,35. |
угловой скорости сателлитов |
|
Для определения приведённой |
||
воспользуемся формулами
b1пр= - z1 / zb1( 1 - 01)= -38(0 – 126,73)/14 = 343,98 с-1.b2пр = -z1 / zb2( 2 - 02)= -46(200-126,73)/17 = 198,26 с-1.
Таблица 7.2
Результаты графического расчета
Обозна- |
Передат. |
|
|
|
|
Угловые скорости, с-1 |
|
|
|
|||
чение |
число |
|
|
|
|
|
|
|
|
|
|
|
u |
ωвщ |
ω1 |
ωО1 |
ω1’ |
|
ω2 |
ωО2 |
ω2’ |
ωвм |
ωb1пр |
ωb2пр |
|
Аналит. |
2,35 |
200 |
0 |
126 |
200 |
|
200 |
126 |
85 |
85 |
343 |
198 |
метод |
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
Графич. |
2,34 |
200 |
0 |
127 |
200 |
|
200 |
127 |
86 |
86 |
340 |
195 |
метод |
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
В таблицу входят данные, полученные при расчете графическим методом, что позволяет сравнить полученные результаты и проверить правильность вычислений и построений (см. пример).
7.4.3. Кинетостатический расчет механизма
Исходные данные для расчета выбираем по результатам аналитического расчета как более точного, т.е.
–передаточное число коробки передач при включении тормоза Т1: u= 2,35;
–число сателлитов в каждом ряду: q = 2 (табл.7.1);
–угловая скорость звеньев: (см. данные табл. 7.2);
–вращающий момент на ведущем валу: Мвщ =1000 Н∙м.
1.Составляем пространственную схему механизма (рис. 7.5). На схеме наносим направление угловых скоростей всех центральных звеньев, ведущего и ведомого валов в соответствии с их направлением вращения, т.е. учитываем знак (см. табл. 7.2).
2.Определяем величину и действие внешних моментов. Для этого составляем уравнение равновесия для механизма в целом по условию
∑Ммех = 0:
Мвщ + Мвм + Мтор = 0.
166

Определяем момент на ведомом валу и тормозной момент:
Мвм = - u Мвщ = -2,35∙1000 = -2350 Н·м.
Мтор = - Мвщ - Мвм = -1000- (-2350) = +1350 Н·м.
В соответствии с полученными знаками наносим моменты на пространственную схему.
3. Определяем моменты от действия внутренних сил. Для этого составляем уравнения равновесия для каждого центрального звена:
Уравнение равновесия для звеньев вщ-1′-2, 01- 02,1, 2′-вм Мвщ + М1′ + М2 = 0;
М01 + М02 = 0;
М1 + МТ = 0; Мвм + М2′ = 0.
Из этих уравнений находим
М1 = - МТ = - 1350 Н∙м. М2′ = -Мвм = + 2350 Н·м.
Для определения остальных внутренних моментов составляем
|
|
ωO1 |
|
Ff2 |
|
ω2' |
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|||
|
|
|
|
|||||
|
|
|
|
F2' |
|
|
||
|
F1' |
|
|
|
|
|
||
|
|
|
2FО2 |
|
|
|
|
|
|
|
Ff1 |
|
|
|
2Ff2 |
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
2Ff1 |
2FО1 |
|
ωO2 |
|
F2 |
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|||
|
F1 |
Fв1 |
|
|
|
|
ωВМ |
МВМ |
|
|
|
||||||
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
||
ωВЩ МВЩ |
|
|
|
|
ω2 |
|
||
МТ |
|
|
|
|
||||
|
|
|
|
|
|
|||
Рис. 7.5. Пространственная схема нагружения планетарной передачи
уравнения равенства моментов для рядов данного механизма без учета потерь:
М01 = -(1+k1)M1 , М02 = -(1+k2)M2;
М1′ = k1M1, М2′ = k2M2;
М01= М02= -(1+k1)M1 = -(1+1,74)·(-1350) = 3699 Н∙м; М1′ = k1M1 = 1,74·(-1350) = - 2350 Н∙м;
M2 = М2′/ k2 =2350 / 1,74 = 1350 Н∙м.
167
Правильность расчетов проверяем по формуле, определяющей равновесие устройства в целом,
Мвщ + М1′ + М2 = 1000 +(-2350)+ 1350 = 0.
4.Производим разметку сил в подвижных соединениях. Начинать лучше всего с того звена, к которому приложено не более двух моментов, и действие одного момента уже показано на схеме. Допустим, к звену 1 приложено два момента М1 и МТ, причем тормозной момент МТ уже указан на схеме. В таком случае сила F1, создающая момент М1, будет приложена так, чтобы уравновесить тормозной момент МТ. F1 = - Fb1. Определим направление силы F01 = -2 Fb1. Разметку сил другого ряда начинаем по общему сложному звену 01-02, к которому приложено тоже два момента и один уже указан на схеме. Далее действуем по образцу первого ряда.
5.Определяем функции центральных звеньев и выясняем назначение
рядов.
В первом ряду солнечная шестерня 1 является тормозным звеном, эпициклическая шестерня – ведущим звеном, так как направление угловой ω1΄ скорости противоположно действию внутреннего момента М1′. Водило является ведомым звеном. Данный ряд считается планетарным, так как состоит из тормозного, ведущего и ведомого звеньев.
Во втором ряду солнечная и эпициклическая шестерни являются ведомыми звеньями, а водило – ведущим звеном. В этой связи ряд будет дифференциально-разделяющим.
6.Построение диаграммы потока мощности дано на рис.7.6.
|
|
Т1 |
|
αО2 |
= 2,35 |
|
|
|
|
|
|||
|
|
|
|
|
α2' = 1 |
|
|
|
|
|
|
2' |
|
αO1 = 2,35 |
|
|
|
|
|
|
|
|
|
1' |
|
b2 |
|
|
|
|
|
|
||
|
О1 |
b1 |
|
О2 |
|
|
αВЩ = 1 |
α1' |
= 2,35 |
αВМ = 1 |
|||
|
|
|||||
|
|
|
1 |
|
||
|
|
|
|
|
2 |
|
|
|
|
|
|
α2 = 1,35 |
|
|
|
|
Рис. 7.6. Диаграмма потока мощности |
|||
168
Определяем мощность на каждом звене по формулам:
Рвщ = |ωвщ∙Мвщ| = 200∙1000 = 2∙105 Вт, Р1 = |ω1∙М1| = 0∙1350 = 0,
Р01 = |ω01∙М01| = 126,73∙3699 = 4,71∙105 Вт, Р1′ = |ω1′∙М1′| = 200∙2350 = 4,71∙105 Вт, Р2 = |ω2∙М2| = 200∙1350 = 2,7∙105 Вт, Р02 = |ω02∙М02| = 126,73∙3699 = 4,71∙105 Вт, Р2′ = |ω2′∙М2′| = 200∙2350 = 4,71∙105 Вт, Рвм = |ωвм∙Мвм| = 85,5∙2350 = 2∙105 Вт.
В качестве меры загруженности i-го сечения многорядного механизма находим единичную мощность i для каждого звена.
вщ = Pвщ / Pвщ = 1;
1 = P1 / Pвщ = 0 / 2∙105 = 0;
01 = P01 / Pвщ = 4,7∙ 105/ 2∙105 = 2,35;
1′ = Р1′ / Pвщ = 4,7∙ 105/ 2∙105 = 2,35;
2 = P2 / Pвщ = 2,7∙105 / 2∙105 = 1,35;
02 = P02 / Pвщ = 4,7∙ 105/ 2∙105 = 2,35;
2′ = Р2′ / Pвщ = 4,7∙ 105/ 2∙105 = 2,35;вм = Pвм / Pвщ = 2∙ 105/ 2∙105 = 1.
Так как имеются звенья с величиной относительной мощности i > 1, i = 1 и i< 1, то рассматриваемый механизм является перегруженным. В данном механизме нагруженные ряды образуют замкнутый контур 1΄- b1- 01-02 - b2 - 1΄, в котором имеет место циркулирующая мощность, перегружающая звенья. Это может вызывать их повышенный износ.
8. ТРЕНИЕ В МЕХАНИЗМАХ
Трением называют явление, при котором возникает сила сопротивления относительному перемещению двух соприкасающихся тел.
Как показывают исследования, трение представляет собой сложный физико-химический процесс, протекающий как на макро-, так и на микроуровнях. В данном разделе изложены элементарные сведения по теории трения применительно к решению типовых задач теории механизмов и машин.
8.1. Виды трения
По видам относительного движения различают трение скольжения и трение качения. При трении скольжения одни и
169