

2164
.pdfДля балансировки большого количества однотипных деталей, например, коленчатых или карданных валов, на автомобильных заводах существуют станки-автоматы. Обычно на этих станках колебания неуравновешенной детали воспринимаются специальными датчиками. Эти сигналы усиливаются и подаются на вычислительные устройства, которые оценивают величину и положение неуравновешенных дисбалансов, параметры и место размещения противовесов.
В последние десятилетия развитие получила автоматическая балансировка, при которой обе фазы балансировки – измерение неуравновешенности и ее устранение – осуществляются без участия оператора.
Отдельное направление теории балансировки представляет уравновешивание гибких роторов, под которыми понимаются детали, диаметр которых много меньше их протяженности по длине, работающие на высоких скоростных режимах, когда силы инерции отдельных составных частей деталей могут вызвать значительные изгибные деформации. Учет особенностей гибких роторов, применяемых в различных отраслях промышленности, привел к созданию специфичных способов балансировки.
11.4. Уравновешивание сил инерции в механизмах
Для уравновешивания главного вектора сил инерции механизма необходимо и достаточно, чтобы общий центр тяжести S системы подвижных звеньев оставался неподвижным. Этим условием в форме xS = const и уS = const можно воспользоваться для уравновешивания.
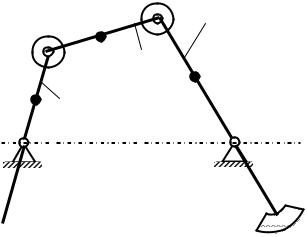
На рис. 11.10 изображена схема шарнирного четырехзвенника. Требуется выполнить его уравновешивание.
Произведем статическое замещение массы т2 шатуна 2 двумя массами, сосредоточенными в точках А и В. Находим
|
в |
|
|
a |
|
тА т2 |
|
; |
тB т2 |
|
. |
|
l2 |
||||
l2 |
|||||
В соответствии с этим массы механизма приведены к звеньям, имеющим лишь вращательное движение. Уравновешиваем каждое из них, добиваясь, чтобы центр тяжести звена 1 вместе с противовесом массой тI находился в центре вращения звена 1 – О1, а центр тяжести звена 3 вместе с противовесом массой тIII находился в центре звена 3 О2. Для этого необходимо, чтобы суммы статических моментов относительно точек О1 и О2 соответственно были бы равны нулю, т.е.
mА l1 m1 О1S1 m1 r1 0 и mВ l3 m3 О2S3 mIII r3 0.
О А
Откуда т r1 т2 2701 в т1 ОS1,
АВ
ВС
mШ r3 m2 АВ а m3 02 S3
В уравнениях (11.6) правые части следует считать полностью известными по результатам проектирования. Неизвестные параметры
противовесов – левые |
части в |
(11.6) – определяются в процессе |
|
|
|
|
(11.6) |
|
|
|
. |
конструирования противовесов. |
|
|
|
A |
b2 |
|
3 |
a2 |
|
B |
|
|
S2 |
2 |
|
|
S3 |
||
|
|
|
|
S1 |
1 |
|
|
a1 |
O2 |
O1 |
rI |
r3 |
|
mIII |
||
|
 mI
mI
(11.6)
Рис. 11.10. Полное статическое уравновешивание шарнирного четырехзвенника корректирующими массами, размещенными на кривошипе 1 и коромысле 3
Другое решение задачи уравновешивания шарнирного четырехзвенника показано на рис. 11.11, в соответствии с которым общий центр масс звеньев механизма приводится в центр О1, а массы противовесов mI и mII размещаются на кривошипе 1 и шатуне 2.
В кривошипно-ползунном механизме (рис. 11.12) массу поршня m3 можно считать сосредоточенной в точке В, массу шатуна 2 – в центре масс S2 и массу mI кривошипа 1 – в центре масс S1 . На линии АВ расположим противовес mII и подберем его величину так, чтобы центр масс mI , mII и m3 оказался в точке А. Из уравнения статических моментов относительно
точки А находим
m2 а2 m3 АВ mII r2.
Откуда mII m2 а2 m3 АВ/r2. |
(11.7) |
271

Формула (11.7) показывает, что масса противовеса mII будет тем больше, чем меньше радиус r2.
A |
|
|
mв |
3 |
m |
2 |
m |
3 |
m |
II |
|
|
S2 |
2 B |
|
|
|
|
|
||||
mII |
mа |
S3 |
|
|
|
|
|
|
|
||
S1 |
|
|
|
|
|
|
|
|
|
||
1 |
|
|
|
|
|
|
|
|
|
|
|
|
O1 |
|
|
|
O2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
 mI
mI
Рис. 11.11. Полное статическое уравновешивание шарнирного четырехзвенника корректирующими массами, размещенными на кривошипе 1 и шатуне 2
Если снабдить шатун 2 найденным противовесом mII, то можно считать, что в точке А сосредоточена масса, равная .
На кривошипе 1 поставим противовес m1 и подберем его величину так, чтобы центр масс mI и m2 оказался в точке О.
Из уравнения статических(mмоментовm относительноm ). точки О находим
2 3 II
m2 m3 mII ОА m1 а1 mIr1 .
Откуда m |
I |
m |
2 |
m |
3 |
m |
II |
ОА m |
а /r . |
|
|
|
|
1 |
1 1 |
Радиус r1 может быть задан произвольно. После постановки обоих противовесов центр масс всего механизма будет совпадать с точкой О и в процессе работы будет неподвижен.
272


 m
m
размещаются корректирующие массы m, уравновешивающие силы инерции поступательно движущихся масс первого или второго порядка. Аналогичным образом могут уравновешиваться моменты сил (рис. 11.13, б). При этом зубчатые колёса 1 и 2 должны вращаться в одном направлении, а требуемая величина уравновешивающего момента сил достигается за счёт подбора корректирующих масс m и межосевого расстояния А.
|
Fх1 |
F |
1 |
F |
|
|
|
|
|
|
|||
1 |
|
1 |
т |
α |
|
|
т |
|
|
|
|
||
|
|
|
ω |
|
||
|
Fу1 |
ω |
|
|
||
|
|
т |
|
|||
|
|
|
|
|||
|
ω |
|
|
Fу1 |
1 |
|
|
|
|
|
А |
|
|
|
|
α=Аcosα |
|
Fх1 |
|
|
|
ω |
|
F |
|
||
|
|
|
1 |
т |
|
|
|
Fу2 |
|
ω |
|
||
|
|
|
Fу2 |
|||
2 |
т |
|
|
2 |
|
F2 |
Fх2 |
F2 |
|
|
|||
|
2 |
|
Fх2 |
|||
|
|
F |
|
|
||
|
|
|
|
|
||
|
а) |
|
б) |
|
в) |
|
Рис.11.13.Уравновешивающие устройства Ланчестера (а, б) и В.А. Щепетильникова (в) для уравновешивания первых гармоник сил и моментов сил
инерции: m – корректирующие массы; F1 , F2 , Fх1, Fх2 , Fу1 , Fу2 – центробежные силы инерции и их проекции на координатные оси; ω – угловая скорость; Α – межосевое расстояние; α – угловая координата
Механизм Ланчестера имеет сравнительно сложную конструкцию, и поэтому в своё время были предложены УУ с МПД другой структуры или с иным размещением корректирующих масс. В частности, известен зубчатый механизм (рис. 11.13,в), предложенный В.А. Щепетильниковым для одновременного уравновешивания первых гармоник главного вектора сил инерции и главного момента.
Приведенные примеры показывают, что практически приемлемый результат уравновешивания чаще получается введением в схему механизма дополнительных кинематических цепей. Вместе с тем следует не забывать, что такой подход увеличивает инерционность механической системы машины, а следовательно, понижает собственные частоты системы и переменную составляющую приведенного момента инерции,
274

что, в свою очередь, повышает виброактивность привода и его динамическое нагружение. Это указывает на необходимость комплексного рассмотрения вопросов уравновешивания и динамического синтеза механизмов машинного агрегата с учётом особенностей его конструкции и условий работы.
Поэтому для уравновешивания, кроме традиционных способов, всё чаще прибегают к применению новых приёмов, например: антимаховиков; динамических гасителей колебаний с дополнительными связями; редукторов, наделённых свойствами уравновешивающих устройств;
в
комбинированных систем, сочетающих достоинства уравновешивания корректирующими массами и динамического гашения колебаний. Описанию традиционных и некоторых новых способов уравновешивания моментов сил, нагружающих корпус машины, посвящены следующие разделы данного учебника.
11.5. Уравновешивание механизмов многоцилиндровых машин
Допустим, что в многоцилиндровой машине геометрические оси цилиндров и ось вращения коленчатого вала расположены в одной плоскости и для каждого кривошипно-ползунного механизма выполнены условия уравновешенности вращающихся масс.
При этих условиях на корпус машины вдоль геометрических осей цилиндров действуют неуравновешенные силы инерции от поступательно
движущихся масс. Приведенные силы могут быть представлены в виде
Рис. 11.14. Схема двухцилиндрового двигателя
суммы неуравновешенных сил различных порядков.
где для отдельного центрального |
кривошипно-ползунного механизма |
||||||||||||||
|
|
F |
F |
I |
|
F |
II |
F |
IV |
, |
|||||
(см. рис.11.12) |
|
i |
|
i |
|
|
|
i |
|
|
|
i |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
F I |
OA 2 |
|
m cos ; |
||||||||||||
F |
II |
|
OA |
2 |
|
|
m |
|
|
A2 |
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
cos 2 |
||||
F |
IV |
OA |
2 |
|
m |
|
A4 |
|
|
||||||
|
|
|
|
|
|
|
|
|
cos 4 |
||||||
m = m3 = m2B; m2B – масса шатуна, отнесенная к точке В; А2, А4, … – коэффициенты ряда, в который раскладывается функция F а , зависят от параметра ОА/ ОВ.
275

Силу Fi нельзя уравновешивать для отдельно взятого кривошипно - ползунного механизма путем прикрепления корректирующей массы к кривошипу.
Но в многоцилиндровых машинах вполне возможно достигнуть взаимного уравновешивания сил первого, второго, а в некоторых случаях и более высокого порядка при помощи простейших конструктивных средств,
I
II II
в |
в |
I |
III

 II
II
Рис. 11.15. Схема трехцилиндрового двигателя
к которым относится выбор относительного расположения кривошипов и подбор величины поступательно движущихся масс.
Рассмотрим простейший случай, когда размеры кривошипов и шатунов, а также их массы и массы поршней в группах соответственно равны.
В двухцилиндровом двигателе с расположением кривошипов под углом 1800 (рис.11.14) поршни движутся навстречу друг другу.
Силы инерции первого порядка всегда будут направлены в противоположные стороны, т.е. уравновешены. Силы инерции второго порядка будут направлены в одну сторону, так как они пропорциональны cos 2 α, т.е. остаются неуравновешенными. То же относится и к силам четвертого порядка.
Остается неуравновешенным и момент от сил инерции первого порядка:
M1 вm ОА 2 cos ,
где в – расстояние между осями поршней.
В трехцилиндровом двигателе с расположением кривошипов под углом 1200 (рис.11.15) уравновешенными будут силы инерции первого, второго и четвертого порядков. Неуравновешенными будут силы инерции
276

шестого порядка; причем они складываются и в сумме в три раза больше сил инерции шестого порядка в одном двигателе. Не уравновешены и моменты сил первого и второго порядков.
I |
IV |
|
I, IV |
II |
III |
|
II, III |
Рис. 11.16. Схема четырехцилиндрового двигателя
Вчетырехцилиндровом двигателе с расположением кривошипов под углом 1800 (рис.11.16) уравновешены силы инерции первого порядка и моменты сил всех порядков. Не уравновешены силы инерции второго порядка.
Вшестицилиндровом двигателе с расположением кривошипов под углом 1200 коленчатый вал представляет собой как бы два коленчатых вала трехцилиндровых двигателей, спаренных так, что один является зеркальным отражением другого. Поэтому моменты сил инерции всех порядков в таком двигателе будут уравновешены. Кроме того, силы инерции первого, второго и четвертого порядков также будут уравновешены.
11.6. Типовые устройства с корректирующими массами для уравновешивания главного момента
Моментная уравновешенность без нарушения статической может быть осуществлена с помощью устройства (см. рис.11.13,б), о котором уже упоминалось в 10.4. В этом устройстве центробежные силы инерции сводятся к паре сил с моментом.
ур m r 2 cos 0 ,
где α0 – начальный угол установки корректирующих масс относительно выбранной системы координат. При этом радиусывекторы r размещения масс m должны быть параллельны.
y |
|
y |
А1 S2 |
|
277 |
S΄ |
|
|
1 |
|
|
|
А1 |
О |
α |
|
|
||
|
|
|
|
О |
2 |
|
δ |

Для случая, когда частота доминирующей гармоники совпадает с частотой вращения входного звена механизма, в качестве уравновешивающего устройства используются дополнительные кинематические цепи с корректирующими массами, выполненные в виде зубчатой передачи (рис.11.17,а) или шарнирного механизма (рис.11.18,б).
В простейшем исполнении такой зубчатый механизм содержит три колеса, из которых колесо I жестко соединено со звеном ОА , а на колесе 3 размещается корректирующая масса m. Числа зубьев этих колес
Главный вал |
A-A |
m2 |
|
A |
m2 |
|
Электродвигатель |
m1
m1 |
m1 |
 m2
m2
А
Рис. 11.18. Кинематическая схема двухступенчатого редуктора с корректирующими массами m1 и m2
278

одинаковы, а промежуточное колесо 2 служит для получения положительного передаточного отношения.
|
A-A |
|
A |
m1 |
|
m1 |
||
Главный |
||
Электродвигатель |
||
вал |
m2 |
|
|
m2 |
m
 m1
m1  m1
m1
AА
Рис. 11.19. Кинематическая схема одноступенчатого редуктора с
корректирующими массами m1 и m2
Шарнирный уравновешивающий механизм может быть представлен шарнирным параллелограммом, образуемым путем присоединения к основному механизму структурной группы второго класса второго порядка.
В качестве зубчатых колес, несущих корректирующие массы, могут использоваться и звенья редуктора. При этом на структуру и параметры редуктора накладываются дополнительные условия, выполнение которых обеспечивает моментное уравновешивание корпуса машины. Существо таких условий сводится к тому, что редуктор должен обеспечивать необходимую частоту вращения зубчатых колес с корректирующими массами, а также одновременно и требуемое передаточное отношение редуктора в целом. Уравновешивание с помощью корректирующих масс, размещаемых на шестернях редуктора, упрощает конструкцию привода машины.
Наиболее рациональны по своей структуре для достижения указанной цели двухступенчатый редуктор (рис.11.18), позволяющий в ограниченном пространстве размещать зубчатые колеса с корректирующими массами, обеспечивающими уравновешивание минимум по двум доминирующим гармоникам, и одноступенчатый редуктор (рис. 11.19) со смещением оси ротора двигателя относительно оси главного вала. Методика расчета этих уравновешивающих устройств аналогична расчету параметров механизма Ланчестера.
279