

2164
.pdfпланетарном механизме (см. рис. 4.5)имеется один ряд (р = 1),в состав которого входят три центральных звена [вщ-1, 01–вм и 1']. Между ведущим валом и солнечной шестерней имеется парная связь, между ведомым валом и водилом еще одна парная связь, т.е. возникают две парные связи λ = 2.
W =2p+2–λ=2 1+2–2=2.
Таким образом получаем двухстепенной механизм, так как
W=2p+2–λ=2 1+2–2=2 .
Механизм является рабочим и для него необходимо задать два закона движения, а именно:
–подаём движение на ведущий вал вщ;
–затормаживаем эпицикл.
Данный механизм может превращаться в одностепенной, если в конструкцию заложить неподвижность эпицикла (получим бортовой редуктор, рис. 6.1, г).
6.2. Кинематический анализ планетарных механизмов
6.2.1.Аналитический метод кинематического анализа планетарных механизмов. Уравнение кинематики дифференциального ряда
Рассмотрим дифференциальный ряд, у которого абсолютные угловые скорости центральных звеньев, а именно солнечной шестерни, эпициклической шестерни и водила соответственно равны (см. рис. 4.5) 1, 1 , 01. Применим принцип обращённого движения. Для этого мысленно сообщим всем звеньям механизма дополнительное вращение вокруг центральной оси 0 с угловой скоростью 01, равной по величине и противоположной по направлению угловой скорости водила 01.После сообщения звеньям механизма дополнительного движения с угловой скоростью 01 водило 01 становится условно неподвижным и дифференциальный механизм станет приведенным рядовым механизмом. В полученном приведенном механизме угловая скорость солнечной шестерни будет равна пр = 1- 01,а угловая скорость эпициклической шестерни пр = 1 - 01. Следовательно, передаточное число приведенной рядовой передачи определяется формулой
|
пр |
|
1 0 |
|
uпр |
|
z |
||
uпр |
|
|
1 |
, |
|
1 |
. |
||
|
|
|
|||||||
|
пр |
|
1 |
01 |
|
|
|
z1 |
|
Для любого дифференциального |
ряда |
внутреннее |
передаточное число есть постоянная |
||||||
величина, полностью характеризующая кинематические и конструктивные особенности данного ряда. Для упрощения записи, особенно при расчетах многорядных планетарных механизмов, абсолютную величину внутреннего передаточного числа ряда принято обозначать k. Величина k называется параметром, или характеристикой ряда.
k z1 . z1
Решая данные уравнения, совместно получим уравнение кинематики дифференциального ряда, с помощью которого выполняются многие задачи кинематического анализа планетарных механизмов.
k |
|
|
1 |
|
01 |
или |
|
|
|
1 |
|
k |
|
|
k1 |
|
|
|
|
|
|
|
|||||||||||||
|
1 |
|
01 |
|
1 |
|
|
1 01 |
|
1 . |
|||||||
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
Выведем формулу передаточного числа для рядов с различными заторможенными звеньями. При заторможенном эпицикле (ω΄1 = 0) солнечная шестерня является ведущим звеном, а водило
ведомым, передаточное число равно
u |
|
1 |
1 k |
|
0 |
||||
101 |
|
1 . |
||
|
1 |
|
||
140

При заторможенной солнечной шестерне (ω1 = 0) эпицикл является ведущим, водило ведомым, передаточное число равно
u1 0 1 1 k1 .01 k1
При заторможенном водиле (ω΄01 = 0) солнечная шестерня является ведущим звеном, эпицикл ведомым, передаточное число равно
u 1 k .
11` 1 1
Для расчета подшипников сателлита необходимо знать угловую скорость сателлита относительно водила, равную приведенной угловой скорости вращения сателлита. Если ведущим звеном
является эпицикл, то формула для определения приведенной угловой скорости имеет вид
прb1 |
|
z1 |
1 0 |
. |
|
||||
|
1 |
|||
|
|
zb |
|
|
|
1 |
|
|
|
Для бронетанковой техники наиболее характерен случай, когда механизм имеет один ведущий вал с заданной угловой скоростью, один ведомый вал и одно или несколько тормозных звеньев, т.е. многорядный планетарный механизм. Для этого случая при кинематическом анализе необходимо составить систему уравнений, а именно:
–уравнения кинематики в количестве, равном количеству рабочих рядов;
–уравнения постоянных и внутренних связей;
–уравнение передаточного числа для механизма в целом.
Рассмотрим применение данной методики при кинематическом анализе трехрядного планетарного механизма.
Для определения общего передаточного числа и угловой скорости центральных звеньев планетарного механизма (рис. 6.2) составим и решим систему уравнений.
6.2.2. Уравнения кинематики для рабочих рядов
Для составления уравнений кинематики необходимо выделить частную схему, в которую будут входить только рабочие ряды. Нерабочим называется такой ряд, в состав которого входит хотя бы одно свободное центральное звено.
Свободным центральным звеном является звено, у которого нет постоянной неподвижной связи с ведущим валом, нет постоянной неподвижной связи с ведомым валом, нет жесткой связи с включённым тормозом и нет постоянных междурядных связей.
В планетарном механизме (см. рис. 6.2) свободным звеном при включённом тормозе Т1 является звено 3, нерабочим – третий ряд. Это значит, что первый и второй ряды являются рабочими. Частная схема состоит из первого и второго рядов. Тогда уравнения кинематики для рабочих рядов будут следующие:
1 = (1+k1) 01 - k1 1 ,2 = (1+k2) 02 - k2 2 ,
где k1 = z'1/z1; k2 = z'2/z2 – характеристики планетарных рядов.
141

Т2 |
Т3 |
Т1 |
|
вщ |
|
вм |
|
|
|
Рис. 11.1
Рис. 6.2. К расчету передаточных чисел планетарнойпередачи
6.2.3. Уравнения связей
Ведущий вал имеет постоянную неподвижную связь с эпициклической шестерней первого ряда и с солнечной шестерней второго ряда. Данное сложное тройное звено вращается с одной угловой
скоростью, т.е. вщ= 1 = 2.
Ведомый вал имеет постоянную неподвижную связь с эпициклической шестерней второго ряда. Это звено вращается с одной угловой скоростью, т.е. вм= 2 .
Включённый тормоз Т1 останавливает солнечную шестерню первого ряда, угловая скорость данного звена равна 0, т.е. 1 = 0.
Водило первого ряда имеет постоянную неподвижную связь с водилом второго ряда и вращается
сугловой скоростью 01= 02.
6.3.Графический метод кинематического анализа планетарных механизмов
142

Графический метод совмещённых планов угловых и линейных скоростей основан на теореме о мгновенном центре скоростей, из которой следует, что скорость любой точки звена механизма равна окружной скорости этой точки при вращении вокруг мгновенного центра или полюса р.
|
|
|
|
|
|
|
|
|
|
|
|
r(мм) |
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ωi |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
V |
|
|
|
|
|
|
|
|
|
|
V |
|
ii |
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
r |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
αi |
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
i |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
r |
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
P |
|
|
|
|
|
|
V(м/с) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Рис. 11.2
Рис. 6.3. Распределение линейных скоростей по звену 1 (план линейных скоростей)
Совмещённый план угловых и линейных скоростей строится в координатных осях r, и . Рассмотрим построение графика движения одного зубчатого колеса. График движения можно построить, если известна скорость двух его точек (рис. 6.3).
Пусть зубчатое колесо вращается вокруг полюса с угловой скоростью . Построим график его движения, зная, что линейная скорость полюса p = 0. Проводим параллельно координатной оси на произвольном расстоянии r другую ось, обозначим её и докажем, что отрезки на ней изображают угловую скорость данного звена в некотором масштабе. Для этого возьмём произвольную точку i на зубчатом колесе и определим её линейную скорость по графику движения звена. Отрезок ii1 выражает в масштабе линейную скорость звена, тогда
|
i = iri; |
|
|
|
|
|||
tg = ii1 |
/ рi = |
vi |
l |
i |
l |
; |
||
r |
|
|
||||||
|
|
v |
|
|
v |
|||
|
|
i |
|
|
|
|||
tg = (0 i) / r,
i = = ( 0 i) μ / ri μ l.
Обозначим μ / ri μl, как μ . В результате получим
143
i = (0 i) μ .
Построим график движения для цилиндрической зубчатой передачи (рис. 6.4), зная, что линейная скорость центров вращения колес равна 0.Тогда
так как 1 = 2 = . |
|
1 = 1r1; |
2 = 2r2; т.е. 1r1 = 2r2, |
|
|
|
|
|||||||||||||
|
r1 / r2 = 2 / 1; tg = / r1; tg = / r2 ; |
|
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
||||||||||||||
|
|
|
|
|
tg / tg = r2 / r1 = 1 / 2 = u. |
|
|
|
|
|||||||||||
По совмещённому графику имеем |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
r(мм) |
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
r2 |
|
|
|
ω2 |
|
|
ω΄2΄ |
|
|
|
О |
|
|
ω1 |
|
ωс- |
||||
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
ω2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
α |
|
|
|
|
|||||
|
|
|
|
ß |
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
О2 |
|
r |
|
|
|
|
О2 |
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
 V
V
О1,р |
|
V(м/с)V |
|
|
ω1 |
r1 |
Рис. 11.3 |
|
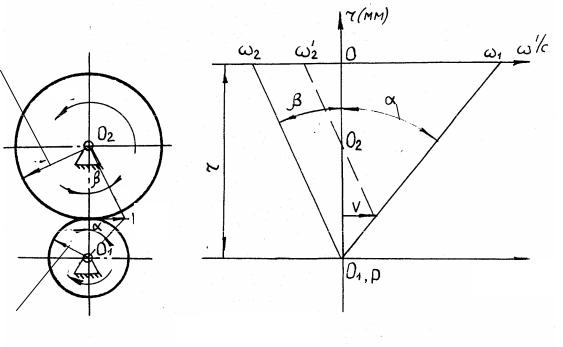
Рис. 6.4. К определению угловых скоростей
tg = (0 1) / r, tg = (0 '2) / ОО2 .
Приведём оба графика к единому полюсу р, т.е. через точку р проводим прямую, параллельную отрезку 02 2 . В результате имеем
|
tg = (o 2) / r; |
|
tg / tg = (0 1) / (0 2) = 1 / 2 = u, |
так как |
1 = (0 1) μ , 2 = (0 2)μ . |
По совмещённому плану угловых и линейных скоростей можно определить не только величины угловых скоростей звеньев и передаточного числа, но и направление вращения звеньев. Координатная ось r делит весь план на две части. Звенья, графики которых находятся в левой стороне от оси r, имеют направление вращения, противоположное звеньям, графики которых находятся в правой стороне от оси r, в соответствии с этим определяем знак передаточного числа, в данном случае "-" .
144

Пример. Определить передаточное число и угловые скорости всех звеньев графическим методом.
Рис. 6.5. Схема механизма и совмещенный план угловых и линейных скоростей
Построение совмещенного плана угловых и линейных скоростей для планетарного механизма (рис. 6.5) начинается с построения кинематической схемы механизма.
Справа от кинематической схемы на миллиметровой бумаге необходимо построить совмещённый план угловых и линейных скоростей для определения передаточного числа и угловых скоростей всех звеньев механизма. В качестве главного полюса совмещенного плана выбирается всегда проекция центральной оси, вокруг которой вращаются все остальные звенья. Совмещенный план лучше начать строить с тормозного звена и строить его в порядке соприкосновения звеньев между собой. В нашем случае солнечная 1 шестерня первого ряда заторможена, поэтому линейная скорость любой точки данного звена равна 0, т.е. a = 0.
Для центральных звеньев одной из точек графика, положение которой всегда известно, служит главный полюс р, лежащий на оси, т.е. концы векторов скоростей центральных звеньев лежат на лучах, выходящих из главного p полюса.
Так как звено 1 заторможено, то линейная скорость точки а равна нулю a = 0, а график движения звена 1 проходит по координатной оси r (отрезок рoa). Зададимся отрезком г, который в определённом масштабе будет выражать скорость точки г, и построим график движения водила первого ряда b1, соединив точки а и г. Найдём на графике точку б, которая также принадлежит звену b1. Но сателлиты b1 соприкасаются с водилом 01 в точке б и с эпициклической шестерней 1' в точке г. Зная, что концы векторов скоростей центральных звеньев лежат на лучах, выходящих из главного полюса р, строим график рб движения водила 01 и график движения рб эпициклической шестерни .
Точка е принадлежит звену 0102. Перенесем её на график рб. Точка d принадлежит сложному звену, состоящему из ведущего вала, солнечной шестерни вщ12 первого и второго рядов, переносим её на график рг. Так как точка е и точка d принадлежат сателлиту b2, то соединив их, получим график движения сателлита. Точку ж найдём на этом графике dе. Но точка ж принадлежит и сложному звену, состоящему из эпицикла второго ряда, жестко связанного с ведомым валом (звену 2'вм). Соединив точку
145

р с точкой ж, получим график движения этого звена. Графики движения сателлитов приводим к единому полюсу р, для этого параллельно графику dеж и абг проводим прямые, проходящие через полюс р.Находим масштаб
μ = вщ / (0 вщ) [с-1/мм].
Зная масштаб, определяем угловые скорости всех центральных звеньев и передаточного числа соответственно по формулам
i = М ∙(0 i), u = (0 вщ) / (0 вм).
Сателлиты находятся в сложном движении. Находим угловую скорость по формуле с учётом знаков.
bi = (0 bi - 0 oi)μω.
7. КИНЕТОСТАТИЧЕСКИЙ АНАЛИЗ ЗУБЧАТЫХ МЕХАНИЗМОВ
При кинетостатическом анализе плоских зубчатых механизмов принимают следующие допущения: ведущий вал механизма вращается с постоянной угловой скоростью, концевые валы и тормозные звенья нагружены только крутящими моментами. Силами тяжести звеньев и силами трения, как и при расчёте на первом этапе рычажных механизмов, пренебрегаем.
7.1. Простая передача
Даны все размеры передачи и момент Мвщ на ведущем валу.
Требуется определить |
момент |
на ведомом валу, опорный |
|
1 |
|
|
|
Мвщ |
|
Мвщ |
1 |
|
F10 |
|
|
|
|
|
|
О |
|
F12 |
О11 ω1 |
О11 |
n |
||
ω1 |
|
r |
|
|
|
|
F 12 |
|
t |
|
t |
W |
|
Ft12 |
W |
|
w |
|
n |
|
а |
|
|
Мвм |
|
|
|
ω2 |
|
|
|
О2 |
|
|
О2 |
|
|
|
2 |
|
2 |
|
|
Рис. 7Рис.1. Схема. 7.1. Схмеханизмамех низма |
Рис. 7.2. Схема нагружения звена 1 |
146

(тормозной) момент Мт, удерживающий корпус от опрокидывания, а также силы в зацеплении колёс и опорные реакции. На ведущем звене 0–1 (рис. 7.1) давление зуба шестерни на зуб колеса передаётся по линии зацепления, т.е. под углом зацепления к касательной. Момент создаётся окружным усилием, поэтому и будем оперировать только им. Для нахождения полного давления F надо поделить окружное усилие Ft на cos .
Из условия равновесия звена 1 получим
Мвщ + М1 = 0, М1 = -Мвщ, М1 = F21r1,
где rl – делительный радиус шестерни.
Проводя окружное усилие F21 к оси вала, найдём реакцию опоры
F01 = F10 = F21 = 2M1 / d1 = - 2Mвщ / d1.
Из условия равновесия ведомого звено 2 (рис. 7.3) получим
Мвм = - М2, М2 = F12·d2 / 2 = - F21·d2 / 2 = - 2Мвщ·d2 / 2d1 = - Mвщ·u; Mвм = -М2 = -u·Mвщ.
К валам редуктора приложены моменты Мвщ и Мвм. Силы в зацеплении уравновешиваются внутри корпуса реакциями подшипников и,
в свою очередь, нагружают корпус реакциями F10 |
и F20, которые создают |
||
|
|
1 |
|
n |
О1 |
|
|
t |
W |
Ft21 |
t |
|
|||
|
Fr21 |
|
n |
|
|
|
|
|
ОМ2 вм |
F21 |
|
|
|
|
|
F20 |
ω2 |
|
|
|
О2 |
|
|
|
|
|
2 |
Рис. 7.3. Схема нагружения звена 2
опрокидывающий момент, который определяется как
147
Мon = F10аw.
Опрокидывающий момент уравновешивается тормозным моментом Мт со стороны фундамента, который определяется по условию равновесия механизма.
Мвщ + Мвм + Мт = О.
7.2. Планетарные механизмы
Рассмотрим дифференциальный эпициклический ряд (рис. 7.4). Предположим, что в ряду имеется q симметрично расположенных сателлитов, между которыми равномерно распределяется вращающий момент Мвщ, приложенный извне к солнечной шестерне. В полюсах зацепления W1, W2, W3 возникают силы нормального давления, приложенные к зубьям солнечной шестерни со стороны сателлитов. Разложив нормальное давление на окружное и радиальное, замечаем, что радиальные силы взаимно уравновешивают друг друга, окружные силы тоже дают главный вектор, равный нулю, а главный момент М окружных сил уравновешивает подводимый извне момент.
Из условия равновесия звена 1 имеем
Мвщ + М1 = О, т.е. М1 = -Мвщ, но М1 = qFtr.
Примем за положительный момент Мвщ, приложенный к ведущему валу, и найдём соотношения между внутренними моментами всех центральных звеньев ряда. По закону действия и противодействия получается, что во всех зацеплениях ряда действуют одинаковые окружные силы
Ft = M1 / r1.
Из условия равновесия сателлита Fbi = 0 получим
2Ft + Fоb = 0; Fоb = -2Ft, а Fbо = 2Ft.
Таким образом, к подшипникам сателлита, как и к подшипникам паразитной шестерни рядового механизма, приложена удвоенная окружная сила. Кроме того, при вращении водила на подшипники сателлитов действует дополнительная нагрузка, которую приходится учитывать как
центробежную силу сателлита (силу инерции).
Fu = -mв 012r01.
Суммарная сила на опоры сателлитов будет равна
Fb = Fоb + Fu.
Рассмотрим планетарный редуктор, у которого входным звеном является солнечная шестерня 1, выходным звеном – эпицикл 1', тормозным
–водило 01.
Втаком случае уравнение для данного механизма будет следующим:
М1 1 + М1' 1' = О;
148

|
М1' = -M1 1/ 1'. |
|
Из уравнения кинематики при 01 = O |
получим 1 = -k1 1', |
|
т.е. |
1/ 1' = -k1. |
|
Тогда |
М1' = М1k1. |
|
1
Ft
2Ft Ft
Ft
2Ft
Ft |
Мвщ |
вщ
вщ Мвщ
Рис. 7.4. Схема нагружения планетарного механизма
Рассмотрим планетарный редуктор, у которого входным звеном является солнечная 1 шестерня, выходным – водило, тормозным – эпицикл.
Тогда уравнение для данного механизма будет
М1 1 + М01 01 = 0, М01 = -М1 1 / 01.
Учитывая, что эпицикл заторможен, находим
|
1 = (1+k1) 01, |
т.е. |
1/ 01 = 1+k1. |
Тогда |
М01 = -М1(1 + k1). |
7.3. Многорядные планетарные механизмы
Рассмотрим многорядный планетарный механизм, который имеет р планетарных рядов, содержащих каждый по три центральных звена (солнце, эпицикл, водило). Некоторые центральные звенья связаны с внешними валами (ведущим, ведомым, тормозными), а некоторые образуют внутренние междурядные связи. Задача кинетостатического анализа многорядных планетарных механизмов заключается прежде всего в определении внутренних моментов, действующих в рядах на
149