

2164
.pdfте же площадки соприкасающихся поверхностей одного тела соприкасаются с различными площадками другого тела. Трением качения является процесс, при котором следующие одна за другой точки одного тела последовательно совпадают с соответствующими точками другого тела. Разновидностью трения скольжения является трение верчения, при котором расположенные в плоскости касания двух тел точки описывают концентрические окружности с центром, лежащие на оси верчения.
По объекту взаимодействия различают внешнее и внутреннее трение. Внешнее трение – противодействие относительному перемещению соприкасающихся тел в направлении, лежащем в плоскости их соприкосновения. Внутреннее трение – противодействие относительному перемещению отдельных частей одного и того же тела.
По признаку наличия или отсутствия относительного движения различают трение покоя и трение движения. Трение покоя – внешнее трение при относительном покое соприкасающихся тел. Трение движения – внешнее трение при относительном движении соприкасающихся тел.
По физическим признакам состояния взаимодействующих тел различают:
–чистое трение, возникающее на поверхностях, освобожденных от адсорбированных пленок или химических соединений, при полном отсутствии на трущихся поверхностях каких-либо посторонних примесей;
–сухое трение, трение несмазанных поверхностей – внешнее трение, при котором трущиеся поверхности покрыты пленками окислов, адсорбированными молекулами газов или жидкостей; загрязнения между поверхностями отсутствуют;
–граничное трение, когда поверхности разделены слоем смазки незначительной величины (не более 1 мкм);
–жидкостное трение, при котором трущиеся поверхности твердых тел полностью отделены друг от друга слоем жидкости;
–полужидкостное трение, при котором между трущимися поверхностями есть слой смазки, наделенный обычными свойствами (одновременно жидкостное и граничное трение).
Впоследнее время активный интерес проявляется к изучению чистого трения, характерного для работы механизмов в среде инертных газов или вакууме.
8.2.Основные закономерности трения скольжения несмазанных тел
170
Рассмотрим ряд приближенных законов, позволяющих расчетным путем определить силы трения.
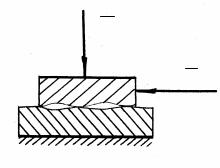
Если поверхности тел (рис. 8.1) находятся под действием нормальной силы Q, то давление на поверхностях соприкасающихся тел распределяется неравномерно даже при самой совершенной их обработке.
Q
F
Рис. 8.1. Увеличенное изображение сечения поверхностей трения
С улучшением обработки поверхностей увеличивается число контактных точек. При отсутствии сдвигающей силы F горизонтальные составляющие реактивных давлений в отдельных точках уравновешиваются. Наличие силы F приводит к перераспределению давлений в точках соприкосновения, уравновешивает силу F так, что сумма горизонтальных составляющих уравновешивает силу F, если тело неподвижно или перемещается равномерно. При неподвижном состоянии тел говорят о силе трения покоя.
Величина этой силы и ее направление зависят от внешних сил, приложенных к трущимся телам, но не могут превышать предельной силы трения покоя, по достижении которой начинается относительное движение трущихся тел.
Отношение силы трения покоя к нормальной силе называется коэффициентом трения покоя. При отсутствии экспериментальных данных пользуются обычно приближенными формулами: формула Г. Амонтона
FТ =ƒ∙Ν, |
(8.1) |
где FТ – величина предельной силы трения покоя; ƒ – коэффициент трения покоя, берется из соответствующих справочников; формула Ш. Кулона
FТ = А + ƒ∙F, |
(8.2) |
где А – постоянная, зависящая от площади касания (сцепляемости поверхностей).
После достижения предельной силы трения покоя начинается скольжение трущихся поверхностей. Силой трения скольжения называется составляющая полной реакции для трущихся тел, лежащая в общей касательной плоскости к поверхности контакта и направленная в сторону,
171
противоположную их относительному смещению. Величина силы трения скольжения определяется по формулам (8.1) или (8.2), в которых коэффициент трения скольжения имеет меньшую величину по сравнению с коэффициентом трения покоя.
Г. Амонтон и Ш. Кулон сформулировали следующие основные положения, касающиеся трения скольжения:
1)сила трения пропорциональна нормальному давлению, формулы
(8.1) и (8.2);
2)трение зависит от материалов и составления трущихся поверхностей;
3)трение почти не зависит от относительной скорости трущихся
тел;
4)трение не зависит от величины поверхностей соприкасания трущихся тел, т.е. от величины удельного давления;
5)коэффициент трения покоя больше коэффициента трения движения;
6)трение возрастает с увеличением времени предварительного контакта соприкасающихся поверхностей.
Дальнейшие исследования позволили уточнить представление о законах трения:
1)коэффициент трения можно считать постоянным и силы трения прямо пропорциональными нормальным давлениям только в определенном диапазоне скоростей и нагрузок;
2)силы трения всегда направлены в сторону, противоположную относительным скоростям;
3)трение покоя в большинстве случаев больше трения движения;
4)с увеличением скорости движения сила трения в большинстве случаев уменьшается, приближаясь к некоторому постоянному значению;
5)с возрастанием удельного давления сила трения в большинстве случаев увеличивается;
6)с увеличением времени предварительного контакта сила трения возрастает.
φ
R N
F
FТ
G
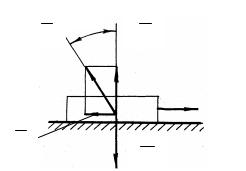
Рис. 8.2. Тело на горизонтальной плоскости (движущая сила параллельна плоскости)
172
Для конкретных технических расчетов необходимо пользоваться статистическими значениями коэффициентов трения, и все расчеты надо считать ориентировочными, потому что трудно предусмотреть те условия, в которых будут работать в действительности элементы кинематических пар. Поэтому, несмотря на то, что трение зависит от скорости и от давления, коэффициент трения для данных материалов поверхностей и их состояние принимаются постоянными, а сила трения подсчитывается приближенно по формуле (8.1).
При граничном трении наиболее часто употребляется эмпирическая формула
ƒ = ƒо + ƒ 1υ + ƒ2 υ2 + ƒ3υ3,
где υ – величина скорости относительного движения трущихся поверхностей; ƒо – значение коэффициента трения при υ = 0; ƒ 1, ƒ2 , ƒ3 – экспериментальные коэффициенты.
8.3. Трение в поступательной кинематической паре
8.3.1. Трение на горизонтальной плоскости
Пусть имеем тело весом G, которое равномерно перемещается по горизонтальной плоскости силой F, параллельной плоскости (рис.8.2). Требуется найти эту силу, если известны вес G и коэффициент трения ƒ.
Составив сумму проекций на вертикаль, получим Ν ═ G. Сумма проекций сил на горизонталь дает F = FТ. Следовательно,
FТ = F = ƒ∙ Ν = ƒ∙G.
Геометрическая сумма сил трения FТ и нормальной реакции Ν называется полной реакцией. Полная реакция R отклонена от нормальной реакции Ν на угол φ, который называется углом трения:
tg φ = FТ f .
N
Если движущей силе F задавать различные направления, то полная реакция R каждый раз будет отклоняться от нормальной реакции N на угол трения, образуя коническую поверхность, которая называется
R
F 
N N α 
φ
FT G FT G
а) б)
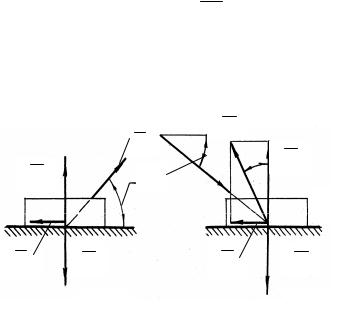
Рис. 8.3. Тело на горизонтальной плоскости (движущая сила под углом к плоскости):
а) α > 0; б) α < 0
конусом трения.
В следующем примере (рис. 8.3,а) направим силу F под углом α вверх к горизонтальной плоскости. Тогда
N + F sin a ˉG =0;
F cos a -FТ = 0.
|
|
f G |
|
sin |
|||
Отсюда |
F = |
|
, или |
F = G |
|
. (8.3) |
|
cos a fsin a |
|||||||
cos(a ) |
|||||||
В соответствии с (8.3) F→ Fmin, если (α–φ) = 0.
Если сила F будет направлена вниз (рис.8.3,б), т.е. будем толкать тело, то в формуле (8.3) следует вместо α подставить (-α). При этом
sin
F=G cos(a )
иF→ Fmin при α = 0. Если же α = 90о – φ, т.е. движущая силы совместится с образующей конуса трения, то
F =G cos90о .
Вывод: никакая сила, приложенная внутри конуса трения (включая и его поверхность), не может вызвать движения.
8.3.2. Трение на наклонной плоскости
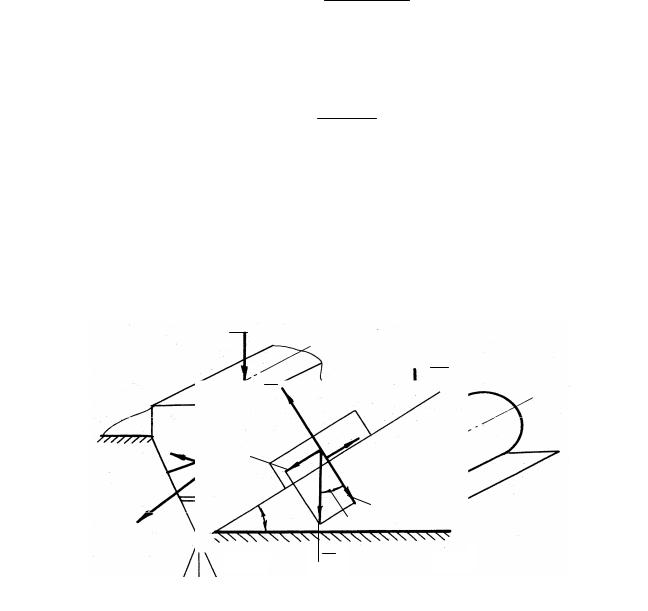
Пусть тело лежит на наклонной плоскости (рис. 8.4). Требуется определить величину угла наклона α, при которой образец начнет скользить вниз. Это достигается тогда, когда
GG sin a = FТ = f∙N =f∙G∙cos a,
G
|
|
|
|
|
|
|
|
N |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
N |
|
|
|
sin |
|
|
|
|
|
|
|
|
|
|
1 |
G |
|
|
|
|
|
|
||||
|
|
|
|
|
|
FT |
||||||||
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
F |
|
|
|
|
|
|
|
|
|
|
cos |
||
|
|
|
|
|
|
|
α |
|
|
|
G |
|||
|
|
|
|
|
|
α |
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|||
G б)
Рис. 8.4. Тело на наклонной плоскости
|
|
174 |
Рис. 8.5. К расчету сил трения в желобе: а) – направляющие ползуна в виде двух плоскостей; б) – направляющая в виде круглого желоба
откуда |
tg a = ƒ = tg φ, |
т.е. α = φ . |
(8.4) |
Условие (8.4) носит название условия самоторможения. Рассматривая равновесие тела на наклонной плоскости, определим
движущую силу:
F = G∙ tg (a + φ).
Применительно к наклонной плоскости находится коэффициент полезного действия как отношение сил полезных сопротивлений к работе движущей силы.
Принимая за полезную работу подъем тела на высоту h, вычисляем
|
G h |
|
G sin a |
|
tg a |
|
|
F lcos a |
G tg (a ) cos a |
tg (a ) . |
|||||
|
|
|
|||||
8.3.3. Трение в желобе
В некоторых случаях поверхность соприкасания ползуна и направляющей в поперечном сечении имеет вид симметричного двугранного угла или желоба (рис. 8.5,а).
К ползуну 1 приложена движущая сила F, параллельная от желоба силе Q, перпендикулярная этой оси, нормальные реакции N1 и N2, перпендикулярные граням желоба, и две силы трения, возникающие между ползуном 1 и гранями желоба F1 иF2; причем суммарная сила трения
FТ = F1 + F2 = ( N1 +N2)·ƒ = 2N1∙ƒ, т. к. N1 =N2.
Учитывая, что
N1 +N2 +Q = 0,
175
строим треугольник сил. Из этого треугольника получаем
2 N1 = |
Q |
или FТ |
|
Q f |
|
||
|
= |
|
. |
|
|||
sin a |
sin a |
|
|||||
Обозначая |
f |
f |
, |
|
|
(8.5) |
|
sin a |
|
|
|||||
|
|
|
|
|
|
|
|
записываем
FT Q f .
Из (8.5) видно, что приведенный коэффициент трения в желобе f больше коэффициента трения ползуна на плоскости. Применительно к круглым ползунам (рис. 8.5,б) f = 1,27f.
8.3.4. Трение в неподвижных направляющих
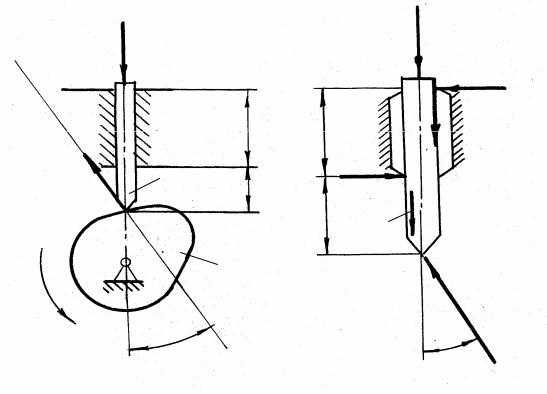
Рассмотрим схему кулачкового механизма с поступательно движущимся толкателем (рис.8.6, а). Пусть к ползуну 2 приложены движущая сила F, направленная по нормали п – п, сила Q, нагружающая толкатель – ползун 2, нормальные реакции N1 и N2 и силы трения FТ1 и FТ2. Требуется составить условие передачи движения в неподвижных направляющих.
С целью упрощения решения задачи предполагаем, что под действием приложенных к толкателю сил произойдет его перекос в направляющих и реакции N1 и N2 будут сосредоточены в точках А и В. Полагая
F1 = f ∙N1 и F2 = f ∙N2,
применительно к рассчитанной схеме (8.6, б) запишем уравнения равновесия толкателя в виде
N1 – N2 + F cosα = 0;
F sinα – f ∙ N1 – Q = 0.
176
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Q |
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Q |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
В |
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
N |
|
|
|
|
|||||
п |
|
|
|
|
|
|
1 |
|
|
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
l |
l |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
N |
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
2 |
|
у |
|
|
|
А |
|
|
|
F2 |
|
|
|
|
|
|
|||||||
F |
|
|
|
|
|
|
|
|||||||||||||||||||
|
|
|
|
у |
|
|
F |
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
М |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
α |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
а) |
|
|
|
|
|
α |
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
б) |
|||||||||
|
|
|
|
|
|
п |
|
|
|
|
|
|
F |
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Рис. 8.6. Схема кулачкового механизма (а) и расчетная схема (б) действия сил на толкатель при его перекосе в направляющих
N1 ∙ у + N2 (l + у) + f ∙N1 ∙ a/2 – f ∙ N2 ∙ a/2 = 0. |
(8.6) |
||||||
Решая систему уравнения (8.6), получаем |
|
|
|
||||
F |
|
Q |
|
|
|
, |
(8.7) |
|
2у |
|
f a |
|
|||
|
|
|
|||||
|
sin f 1 |
|
|
|
cos |
|
|
l |
e |
|
|||||
|
|
|
|
|
|||
где α – угол давления (угол между нормалью п – п и линией перемещения толкателя.
Так как в (8.7) |
|
|
f a |
1,0 и |
2у |
, то |
|
|
|
|||
|
|
l |
|
|
|
|||||||
|
|
l |
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|||
F |
|
|
|
|
Q |
|
|
|
|
|
. |
(8.8) |
|
|
|
2 у |
|
|
|||||||
|
|
|
|
|
|
|
|
|
||||
|
|
sin |
f |
1 |
|
|
cos |
|
|
|||
|
l |
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
Анализ (8.8) показывает, что максимальная величина угла α должна быть ограничена. Угол давления, при котором
177

|
|
f |
|
|
2 у |
|
|
|
|
sin кр |
|
|
1 |
|
|
cos |
кр |
0 , |
|
|
|||||||||
|
|
|
|
|
l |
|
|
|
|
носит название критического угла. При этом передача движения в механизме невозможна. В этой связи допускаемый максимальный угол давления для рассматриваемого механизма ограничивают. В частности, при удалении толкателя от центра кулачка 2 max рекомендуется не более
30 .
8.3.5. Трение в винтовой кинематической паре
Пусть имеем неподвижный винт с прямоугольной резьбой (рис. 8.7), по которому вверх перемещается гайка, преодолевая осевую силу Q.
r1
r2
F
Q
Рис. 8.7. К расчету сил трения
в винтовой кинематической паре
Требуется определить зависимость между осевой силой Q и
прикладываемым к гайке крутящим моментом Μкр .
Заменим гайку её элементом, на который будет действовать сила Q. Тогда движущую силу F найдем по формуле
|
|
|
F Q tg , |
|
|
(8.9) |
|||
где |
F |
Μ |
кр |
; |
|
rср |
r1 |
r2 |
; |
|
|
|
2 |
||||||
|
|
|
|
||||||
|
|
νср |
|
|
|
|
|||
|
|
|
|
tg |
S |
, |
|
|
|
|
|
|
|
2 ср |
|
|
|
||
|
|
|
|
|
|
|
|
||
где rср |
– средний радиус резьбы; α – угол подъёма средней винтовой линии |
||||||||
резьбы; S – ход винтовой линии резьбы.
Чтобы получить момент, умножим (8.9) на средний радиус резьбы:
178

кр F rср tg .
КПД прямоугольной резьбы находят по той же формуле, что при движении ползуна по наклонной плоскости. Прямоугольная резьба будет самотормозящей при угле подъёма винтовой линии резьбы, меньшем угла трения.
При расчете винтового соединения с треугольной резьбой, рассматривая это соединение как движение ползуна по желобу, воспользуемся понятием приведенного коэффициента трения в желобе, т.е.
f f0 cos ,
где β – половина угла заострения резьбы. Для метрической резьбы
30 и f0 1,155f .
Тогда
кр Q rср tg 0 , где 0 arctg 0 .
Трение в треугольной резьбе при прочих равных условиях получается большим, чем в прямоугольной резьбе. Поэтому прямоугольная резьба чаще применяется как ходовая (домкрат, ходовые винты металлообрабатывающих станков и т.п.), а треугольная резьбы – как крепёжная.
С целью увеличения точности нарезания резьб ходовой механизм токарного станка чаще снабжается специальной трапецеидальной резьбой, где 15 .
8.4. Трение во вращательной кинематической паре
При рассмотрении сухого трения во вращательной кинематической паре пользуются различными гипотезами о законах распределения нагрузки на поверхностях элементов этой пары и их износе.
МQ
ω
R
φ
r |
А |
ρ |