

2164
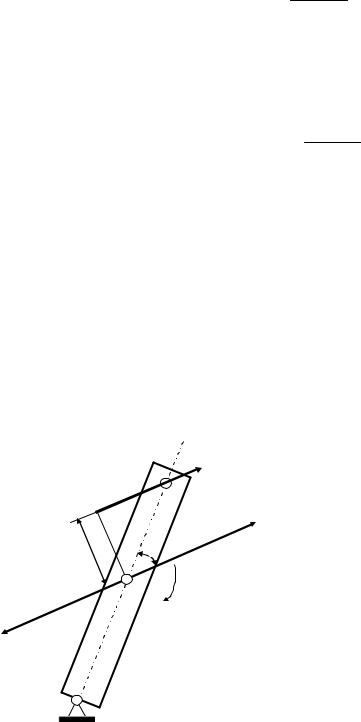
.pdfВ исходном механизме 1-2 (рис. 3.2,а) одно подвижное звено. Число неизвестных для него равно пяти: по два неизвестных в шарнирах Α и В и уравновешивающий момент М ур. Задачу решить невозможно, так как для одного звена можно составить только три уравнения статики.
|
|
F23 |
С |
F54 |
5 |
С |
|
|
|
|
Е |
|
|
||
|
|
|
|
|
С |
||
|
|
|
|
|
|
||
|
В |
3 |
|
Е |
|
|
|
В |
4 |
|
3 |
4 |
|||
|
F45 |
|
|||||
|
|
6 |
|||||
|
|
|
|
|
В |
Д |
|
|
2 Мур |
|
|
|
|||
|
|
|
|
|
|||
|
|
F41 |
|
В Мур2 |
Д |
||
|
|
|
|
|
|||
А |
Д |
F61 |
F |
|
Мур5 |
F32 |
|
Д |
F |
А |
Е |
1 |
F14 |
1 |
1 |
F16 |
|
|
|
а) |
|
|
б) |
Рис. 3.2. Плоский механизм:
а) – с одним подвижным звеном; б) – с двумя подвижными звеньями
Рассмотрим следующую группу – 3–4. В этой группе два подвижных звена /шесть уравнений статики/ и три кинематические пары /шесть неизвестных/, но к одному из звеньев крепится еще одна кинематическая пара, принадлежащая следующей группе /два неизвестных/. Итого, в этой группе восемь неизвестных, а уравнений всего шесть. Задача не решается.
Рассмотрим следующую группу – 5–6. В этой группе шесть неизвестных и можно составить для нее шесть уравнений статики. Следовательно, эта группа статически определима и является последней из присоединенных к исходному механизму. В результате решения группы определяются реакции во всех
ее кинематических парах, в том числе и в шарнире F45 – реакция четвертого звена на пятое
/отброшенного звена на оставшееся/.
Теперь и в группе 3-4 существует соответствие числа неизвестных числу уравнений статики. Решая эти уравнения применительно к данной группе, получим реакции во всех кинематических парах, в том числе и в шарнире В F23. Величина, обратная ей по направлению, будет являться реакцией третьего звена на второе F32 . Теперь и в исходном механизме неизвестных остается только три – реакция в шарнире Α и уравновешивающий момент.
Таким образом, силовой расчет следует производить в последовательности, обратной последовательности присоединения групп Ассура к исходному механизму.
3.4. Определение реакций в кинематических парах
80
Реакции в кинематических парах можно определять аналитическими и графоаналитическими способами. Аналитические способы имеют преимущества пред графическими, так как дают более точные результаты, полученные функции пригодны для расчета других механизмов этого типа. Кроме того, для расчетов можно применять ЭВМ. Вместе с тем при кинетостатическом расчете определяются реакции во всех кинематических парах. Поэтому при расчете сложных механизмов, например, шестизвенников, восьмизвенников аналитическое описание кинетостатики существенно усложняется и лучше пользоваться графоаналитическим способом – методом планов сил. Этот способ заключается в том, что рассматривается равновесие групп Ассура, начиная с последней из присоединенных к исходному механизму. Методика расчета реакций в кинематических парах зависит от класса и вида рассматриваемой группы.
3.4.1. Силовой расчет группы II класса первого вида
На рис. 3.3,а изображена схема группы, на которую нанесены внешние силы F3 , F4 и моменты М3 и М4 . Считаем, что в шарнире реакции F43и F34 взаимно уравновешиваются, т.е. являются внутренними. Вместо отброшенных второго и пятого звеньев прикладываем к свободным кинематическим парам их реакции F23 и F54 – реакции второго звена на третье и пятого на четвертое.
Под действием перечисленных сил и моментов группа находится в равновесии:
F3 F4 F23 F54 0.
В этом равенстве четыре неизвестных – величины и направления реакций F23 и F54 .
Разложим предполагаемые направления реакций F23 и F54 на два направления: перпендикулярные звеньям F23 , F54 и
параллельные звеньям F23n и F54n:
F3 F4 F23n F23 F54n F54 0.
81

От этого разложения количество неизвестных не уменьшилось,
но тангенциальные составляющие F23 иF54 можно найти из суммы моментов относительно промежуточного шарнираточки С.
Мс3 0 – для третьего звена.
М3 F3h3 F23 l3, откуда
F23 F3h3 М3 .
l3
Мс4 0 – четвертого звена.
М4 F4h4 F54 l4 0,
F54 М4 F4h4 .
l4
Если в результате расчета тангенциальная составляющая получится со знаком минус, следует ее предполагаемое направление сменить на обратное. В результате предварительных расчетов в векторном равенстве остаются две
неизвестные – величины векторов F23n и F54n, которые определятся после построения плана сил (рис. 3.3,б). Последовательность откладывания векторов при построении плана сил на результат расчета влияния не оказывает, но при его построении желательно выполнение следующей рекомендации.
Группировать силы следует так, чтобы составляющие реакции одной кинематической пары и силы, действующие на звено этой кинематической пары, находились в одной группе
векторов. На плане F3 , F23n, F23 непосредственно касаются друг друга. Так же получаем вектор полной реакции F54 . Для определения реакции в шарнире С следует рассмотреть равновесие любого из входящих в кинематическую пару звеньев.
Рассмотрим равновесие третьего звена (рис. 3.3,в):
F3n F23n F43n 0.
В этом равенстве два неизвестных – величина и направление реакции F43.
82

Сложение производим на том же плане (рис. 3.3,б), для этого достаточно соединить прямой начало вектора F23 с концом
вектора F3 , получим F43.
Если план сил построен в масштабе , Н мм, то величины
мм, то величины
сил получатся умножением длин соответствующих векторов в миллиметрах на масштаб построения:
F23 F23 ; F54 F54 , F43 F43 .
h4
С
М3 |
М4 |
F4 |
|
|
F54 |
|
h3 |
|
|
|
F43 |
||
F3 |
|
|
|
|
Fn54 |
|
|
|
|
F23 |
|
||
3 |
4 |
|
|
|
|
|
Ft54 |
|
|
|
|
||
Ft23 |
|
F3 |
|
Ft54 |
||
B |
|
О |
F |
Fn23 |
||
|
|
4 |
Ft23 |
|
|
|
Fn23 |
|
|
|
|
|
|
|
n |
|
б) |
|||
|
|
|
|
|||
|
а) |
F 54 |
|
|
|
|
|
|
F43 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
С |
|
|
|
|
|
|
М3 |
|
|
|
|
|
F3 |
|
|
|
|
|
|
|
3 |
|
|
|
|
|
|
в) |
|
|
|
|
|
F23 |
B |
|
|
|
Рис. 3.3. Расчет группы II класса первого вида
3.4.2.Силовой расчет группы II класса второго вида
Втакой группе (рис. 3.4,а) одна из свободных кинематических пар является кинематической парой пятого класса второго
83

вида, т.е. поступательной. В такой паре неизвестными являются величина реакции и точка ее приложения. Рассмотрим равновесие группы:
F3 F4 F23 F54 0.
Разложим реакцию F23 как при расчете предыдущей группы по двум направлениям и определим величину F23:
Мс3 0; F3h3 М3 F23 l3 0;
F23 F3h3 М3 .
l3
Таким образом, в векторном равенстве
F3 F23n F23 F54 0
две неизвестные – величины реакций F23n и F54 , направление F54 совпадает с перпендикуляром к пятому звену.
Построение плана сил проводится в том же порядке, что и при решении предыдущей группы, т.е. откладыванием
векторов F23 ,F3,Р4. Через начало вектора F23 проводим линию действия F54 /перпендикуляр к пятому звену/ до пересечения с линией действия F23n.
F3 F43
Сh4
|
|
Ft23 |
|
М3 |
|
F4 |
|
F4 |
F23 |
|
|
h3 |
|
||
|
|
|
|
F3 |
М4 |
Fn23 |
|
|
F54 |
|
|
3 |
4 |
б) |
С |
|
|||
|
|
5 |
F43 |
|
|
|
|
Ft23 |
|
h3 |
М3 |
B |
|
|
F3 |
Fn23 |
|
hк |
|
К |
|
|
|
|
|
|
|
|
|
|
F23 |
|
F54 |
в) |
|
а) |
|
B |
|
|
|
84
Рис. 3.4. Расчет группы II класса второго вида

Для определения точки приложения реакции F54 точки Κ достаточно рассмотреть сумму моментов относительно промежуточного шарнира – точки С.
МС 0; F4h4 М4 F54hК 0;
hК F4h4 М4 .
F54
Если в результате расчета получится знак минус, точку приложения следует перенести на другую сторону от точки С. Для определения реакции F43 или F34 достаточно рассмотреть равновесие 3-го или 4-го звена. На рис. 3.4,в изображена схема третьего звена, для которого
F3 F23 F43 0.
Определить вектор F43 – это значит надо соединить конец вектора F3 с началом вектора F23. Величины реакции определятся после умножения соответствующих векторов в миллиметрах на масштаб сил построения:
F23 F23 ; F54 F54 , F43 F43 .
3.4.4.Силовой расчет группы II класса третьего вида
Вэтом случае свободные кинематические пары являются вращательными, а внутренняя – поступательной (рис. 3.5,а).
Соединим свободные кинематические пары /точки Β и
С/ прямой ВС и разложим предполагаемое направление реакции F54 по двум направлениям – перпендикулярно
ΒС F54n. Реакция в занятой поступательной паре направлена по перпендикуляру к звену 3, неизвестны точки ее приложения и величина. Из суммы моментов всех сил группы относительно точки Β можно определить F54 , считая реакцию F34 или F43 внутренней.
МВ 0; F3h3 М3 М4 F4h14 F54 lВС 0;
F54 F4h41 М3 М4 F3h3 . lВС
85

Для определения реакции F |
|
или F |
n рассмотрим |
|
|||||||||||||
|
|
|
|
|
|
|
34 |
|
|
|
54 |
|
|
|
|||
равновесие звена 4 в соответствии с векторным равенством: |
|||||||||||||||||
|
|
|
|
|
|
|
|
n |
|
|
|
|
|
n |
0. |
|
|
|
|
|
|
F |
F |
F |
F |
|
|||||||||
|
|
|
|
4 |
34 |
54 |
54 |
|
|
||||||||
|
|
|
|
|
|
|
|
F4 |
|
|
|
|
|
|
F34 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
F34 |
М |
F4 |
|
|
|
Ft54 |
|
F54 |
|
|
|
|
|
|
|||
К |
4 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
h4 |
|
|
|
|
|
|
|
|
|
|
|
|||
М3 |
|
|
|
|
|
Fn54 |
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
F3 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
б) |
|
|
3 |
|
|
4 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
h3 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
B |
|
|
С |
|
hк |
Fn54 |
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
К |
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
h΄4 |
|
|
t |
|
|
|
|
|
|
|
|
|
|
|
|
М3 |
F34 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
F54 |
|
|
|
|
|
|
|
|
|
|
|
|
F3 |
|
|
а) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
3 |
в) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
F23 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
F23 |
|
|
|
|
|
|
|
|
|
B |
|
F43
г) F3
Рис. 3.5. Расчет группы II класса третьего вида
Откладываем в масштабе , Н мм, векторы F4 и F54 .
мм, векторы F4 и F54 .
Через конец вектора F54 проводим прямую, параллельную
F54n, а через начало вектора F4 – прямую, перпендикулярную третьему звену, – линию действия вектора
F34 до пересечения с направлением F54n. Соединив на плане сил начало вектора F54 с концом вектора F54n, получим вектор полной реакции F54 .
86

Для определения положения точки приложения реакции F34 достаточно рассмотреть сумму моментов, действующих на четвертое звено относительно точки С:
МС4 0; М4 F4h4 F34hК 0;
hk F4h4 М4
F34
или сумму моментов относительно точки Β третьего звена:
МВ3 0; F3h3 F43 lВК М3 0;
lВК F3h3 М3 .
F43
Реакция F43 четвертого звена на третье равна реакции F34 , но имеет противоположное направление.
Для определения реакции F23 достаточно рассмотреть равновесие третьего звена, на которое действуют силы
F3 F43 F23 0.
План сил по этому векторному равенству построен на рис. 3.5,г.
Группы II класса четвертого и пятого видов на практике встречаются реже. По этой причине их расчет здесь не рассматривается. То же относится и к трехповодковым группам третьего класса, для кинетостатического расчета которых применяются специальные методы.
В завершение параграфа отметим, что кинетостатический расчет механизмов с высшими парами выполняется по той же схеме, что и для механизмов с низшими парами. В этом случае статическая определимость выполняется, если в соответствии с (3.1) п = 1, р5 = 1 и р4 = 1. Это обусловлено тем, что в высшей паре реакция одного звена на другое, если не учитывать силы трения в этом соединении, направлена по нормали, проведенной через точку касания элементов этой пары, т.е. известна линия действия реакции связи. Другой подход при кинетостатическом расчете механизмов с высшими парами предполагает их замену кинематическими цепями с низшими парами V класса и исследование равновесия полученной
87

группы с фиктивными звеньями, не нагруженными внешними |
||||
силами и парами сил. |
|
|
|
|
3.5. Расчет сил инерции |
|
|
||
Силы инерции возникают в движущихся звеньях за счет |
||||
изменения движения. |
|
|
|
|
Силы инерции определяются в зависимости от формы |
||||
движения рассматриваемого звена. |
|
|
||
При поступательном движении сила инерции будет равна |
||||
произведению массы на ускорение любой точки |
|
|||
рассматриваемого звена. Момент от сил инерции равен нулю, |
||||
так как угловое ускорение при поступательном движении |
||||
отсутствует. |
|
|
|
|
Инерционное |
|
|
|
|
воздействие тела, |
|
|
|
|
вращающегося |
|
|
|
|
неравномерно |
|
|
|
|
вокруг оси (рис. 3.б), |
l |
|
Fи |
|
не проходящей через |
|
|||
аs |
|
|
||
центр массы, |
|
|
|
|
сводится к двум |
|
S |
Ми |
|
величинам: к силе |
аs |
аsп |
|
|
инерции, по |
ε |
|
||
величине равной |
|
|
||
произведению массы |
А |
ω |
|
|
на ускорение центра |
|
|
||
|
|
|
||
массы, условно |
|
|
|
|
приложенной в |
Рис.3.6. К расчету сил энергии |
|||
центре массы и |
||||
|
|
|
||
направленной в |
|
|
|
|
сторону, противоположную ускорению центра массы, и к |
||||
моменту сил инерции, по величине равному произведению |
||||
момента инерции относительно оси, проходящей через центр |
||||
массы, на угловое ускорение и направленному в сторону, |
||||
противоположную угловому ускорению. |
|
|
||
FИ m аS ; МИ JS ε,
где JS – момент инерции тела относительно оси, проходящей через центр массы; m – масса тела; aS – ускорение центра массы,
88
aS lAS 
 4 2 ,
4 2 ,
где lAS – расстояние от оси вращения до центра массы; ω и ε – угловая скорость и угловое ускорение
вращающегося тела.
Таким образом, сила инерции определится по формуле
FИ m lAS 
 4 2 .
4 2 .
3.5.1. Приведение момента и силы инерции к одной
силе
Момент сил инерции МИ и силу инерции можно привести к одной силе. Для этого момент сил инерции представим как пару сил, величины которых равны силе инерции. Чтобы выполнить данное условие, надо подобрать соответствующее плечо пары.
|
|
|
|
|
|
|
|
h |
МИ |
|
JS ε |
. |
|
|||
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
FИ |
m аS |
|||||
|
|
|
|
|
Fи |
|
Приложим полученную |
|||||||||
|
|
|
|
|
пару к звену так, чтобы одна |
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
K |
|
|
|
|
|
|
из составляющих проти- |
||||
|
|
|
|
|
|
|
|
|
|
Fи |
водействовала силе инерции |
|||||
|
|
|
h |
|
α |
|
|
|
|
|
|
(рис. 3.7). В этом случае |
||||
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
другая составляющая пере- |
|||||
|
|
|
|
|
S |
|
|
|
|
|
|
сечет ось звена в точке Κ . |
||||
|
|
|
|
|
|
|
|
|
|
|
Расстояние от центра массы |
|||||
Fи |
|
|
|
|
Ми |
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
до точки Κ может быть |
||||||
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
получено, если замерить |
||||
|
|
|
|
|
|
|
|
|
|
|
|
угол α – угол между |
||||
|
|
|
|
А |
|
|
|
|
|
|
направлением силы инерции |
|||||
|
|
|
|
|
|
|
|
|
|
|
|
и осью звена. Итак, рас- |
||||
Рис. 3.7. Приведение момента и силы инерции |
стояние от центра массы до |
|||||||||||||||
точки приложения равно- |
||||||||||||||||
|
|
|
|
к одной силе |
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
действующей будет равно |
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
SK |
|
|
h |
, но h |
JS |
, тогда |
|||||
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
sin |
|
m aS |
||||||||
|
|
|
|
|
|
89 |
|
|
|
|
|
|
||||