

2164
.pdfFFc |
Fинi |
y |
3 |
2 |
|
|
Si |
|
|
Gi |
1 |
|
Минi |
|

 0 x z МMд д
0 x z МMд д
Рис. 11.1. К уравновешиванию рычажного механизма
Воздействие на фундамент момента сил инерции относительно оси оz, перпендикулярной к плоскости движения механизма, должно рассматриваться совместно с моментами заданных сил, приводящих в движение механизм, и с моментами сил сопротивления. Зависимости для расчета этого момента приведены в следующем параграфе.
При одновременном выполнении условий (11.1) и (11.2) механизм уравновешен динамически.
11.2. Расчет моментов сил, нагружающих корпус машины
Схема механизма произвольного класса показана на рис. 11.2. Механизм состоит из n звеньев и нагружен движущим моментом Мдв и Fc силой сопротивления . Если все звенья отсоединить от стойки, а ее действие заменить силами реакций Rj, где j = 1, 2, … к, то полученную систему подвижных звеньев механизма можно рассматривать в соответствии с принципом освобождаемости от связей как свободную
систему, находящуюся под действием Мдe , Fс , Rj , Сi (силы тяжести i-х
звеньев).
При этом кинетический момент данной системы звеньев относительно точки О будет равен
n |
n |
Lo J si i |
m iVsi qsi , |
i 1 |
i 1 |
где Jsi, mi, ωi, Vsi, qsi – момент инерции, масса, угловая скорость, линейная |
|
скорость центра массы i-го звена и |
плечо вектора miVs относительно точки |
О. |
|
Тогда в соответствии с теоремой об изменении кинетического
260

момента механической системы
|
|
|
dL 0 |
|
n |
|
|
|
|
|
|
M i |
, |
(11.4) |
|
|
|
|
dt |
|
i 1 |
|
|
n |
|
|
|
|
|
|
|
где Мi |
– |
сумма внешних моментов сил, |
|
нагружающих систему |
|||
i 1 |
|
|
|
|
|
|
|
звеньев. |
|
|
|
|
|
|
|
y |
|
|
|
|
An-1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
An |
|
А1 |
S2 |
|
|
Sn-1 |
||
|
|
|
|
|
|
||
|
|
|
S |
|
Bn-1 |
|
Fc |
Mдв |
1 |
B1 |
|
|
|
|
Sn |
|
|
Sn-2 |
|
|
|||
O |
|
x C1 |
|
|
|
|
|
|
Cj-1 |
|
|
|
Cj |
||
Рис. 11. 2. Структурная схема механизма произвольного класса
В развернутом виде уравнение (11.4) может быть представлено как
n |
n |
|
|
n |
|
|
k |
|
|
|
Jsi i miasiqsi Mдв М0 |
|
Fc |
M0 |
|
Gi |
M0 |
|
R |
j , |
|
i 1 |
i 1 |
|
|
i 0 |
|
|
j 1 |
|
|
|
где последняя сумма есть момент опорных реакций относительно оси О (реактивный момент).
Представляя момент сил, передающийся на корпус машины в
виде
|
|
k |
|
|
|
|
|
, |
|
M M o |
|
|
|||||||
R j |
|
||||||||
|
|
j 1 |
|
|
|
|
|
|
|
|
|
n |
|
|
|
|
n |
n |
|
получим M Mдв М0 |
Fc |
M0 |
|
Gi |
|
Jsi i |
ma1 siqsi. |
||
|
|
i 1 |
|
|
|
|
i 1 |
i 1 |
|
Очевидно, что силы Rj можно приводить к любой другой точке, например, к центру масс корпуса машины.
261
В случае если двигатель, механизмы машины и нагружающее устройство смонтированы в едином корпусе, линии действия векторов Fc и Gi лежат в плоскости симметрии машин, то
n n
M Js εi mi asi qsi,
i 1 i 1
так как при этом Мдв является внутренней нагрузкой, не вызывающей колебания корпуса машины.
В общем случае величина момента, передающегося на корпус машины, представляет периодическую функцию от угла поворота входного звена механизма и может быть аппроксимирована тригонометрическим рядом Фурье
n
M M 0 M i cos i i ,
i1
вкотором М0 – постоянная составляющая (среднее значение М за период); Мi и αi – амплитуда и фазовый угол i-й гармоники.
Наибольшую трудоемкость при разрешении задачи уравновешивания этого момента представляет составление аналитического описания М (α) в зависимости от геометрических и массовых параметров механизма и выделения из этого описания доминирующих гармоник. Само же уравновешивание этих гармоник достигается различными средствами сравнительно простой конструкции, как это будет показано ниже.
11.3.Уравновешивание вращающихся звеньев
Вращающиеся массы могут создавать неуравновешенность центробежных сил инерции двух типов: статическую и динамическую. В соответствии с этим различают статическое и динамическое уравновешивание вращающихся масс.
Неуравновешенность сил инерции, возникающая от того, что центр тяжести вращающихся масс не лежит на оси вращения, называется
статической.
Неуравновешенность сил инерции, возникающая от того, что вращающиеся массы распределены неравномерно вдоль оси вращения,
называется динамической.
11.3.1. Статическое уравновешивание вращающихся масс
262
Пусть масса m вращается со скоростью ω вокруг неподвижной оси (рис. 11.3). Если центр тяжести этой массы находится от оси вращения на расстоянии r1, то возникает сила инерции
F1 m1 r1 2 .
Чтобы уравновесить эту массу, нужно поставить противовес, который будет создавать такую же силу инерции по величине и противоположную по направлению, причем F1 = F1,
где |
F m |
r |
2 |
|
|
|
|
|
|
1 |
1 |
1 |
. |
|
|
|
|
|
|
|
Тогда при заданном r1 |
m |
1 |
r |
|
||||
|
|
|
|
mI |
|
1 |
. |
(11.5) |
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
rI |
|
||
В формуле (11.5) произведение массы на расстояние от центра тяжести до оси вращения называется дисбалансом:
D= mr.
Вданном случае дисбаланс массы m1 – D1 равен дисбалансу противовеса DI (корректирующей массы).
Дисбаланс D есть сила инерции массы (несмотря на размерность
кг м), вращающейся с угловой скоростью 1c 1.
При уравновешивании нескольких масс (рис.11.4) подсчитывают дисбалансы каждой массы
D1 m1 r1, D2 m2 r2 , D3 m3 r3 .
Найденные дисбалансы складываются геометрически.
m1 |
DI |
|||
|
|
mI |
|
. |
|
|
r |
||
r1 |
I |
|||
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
rI |
mI |
Рис. 11.3. К уравновешиванию |
вращающейся массы |
263

Для этого строится план дисбалансов в выбранном масштабе (рис.11.4,в). Величина замыкающего вектора, умноженная на масштаб построения, и направление этого вектора определяют величину дисбаланса DI корректирующей массы m1 и направление вектора этого дисбаланса.
mI |
|
mI |
m2 |
|
|
m2 |
|
|
|
rI |
r2 |
|
|
r1 |
|
|
|
|
r3 |
|
|
|
r1 |
|
|
m3 |
m3 |
|
m1 |
|
|
|
а) |
m1 |
|
|
|
D2 б)
D3
D1
DI в)
Рис. 11.4.Статическое уравновешивание нескольких масс: а, б) – схема расположения масс на вращающемся валу; в) – план дисбалансов
11.3.2. Динамическая неуравновешенность вращающихся масс
При динамической неуравновешенности главный момент сил инерции не равен нулю, причем главный вектор может равняться нулю.
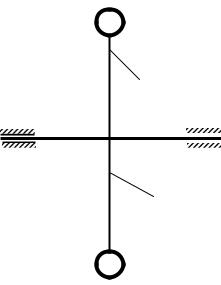
Пусть две вращающиеся массы m1 и m2 размещены в разных плоскостях по длине вала на расстоянии l друг от друга и направлены в противоположные стороны (рис.11.5). Общий центр тяжести этих масс лежит на оси вращения, но система не уравновешена, так как момент М = Dl вызывает реактивный момент и на опоры А и В действуют реакции RA и RВ. Мерой этой динамической неуравновешенности будет величина момента
264

М = Dl, D m1 r1 m2 r2 .
D1
m1
RB
A
B
RA
l
m2
D2
Рис. 11.5. К определению динамической неуравновешенности вала
11.3.3. Общий случай неуравновешенности
В общем случае несколько вращающихся масс, размещенных в разных плоскостях, могут создавать и статическую и динамическую неуравновешенность, т.е. силы инерции от этих масс приводятся к главному вектору и главному моменту. Уравновешивать такие массы следует полностью: статически и динамически.
Уравновешивать только статически можно детали, у которых диаметр больше их протяженности по длине, например: шкивы, зубчатые колеса, маховики и т.п. Другие детали, имеющие значительную протяженность по длине вала, следует уравновешивать полностью, т.к.
265

только статическое уравновешивание может привести к увеличению динамической неуравновешенности.
Существует три способа полного уравновешивания нескольких
масс: |
|
|
|
|
– статическое, а затем динамическое; |
|
|
||
– динамическое с последующим статическим; |
|
|
||
– статическое в двух плоскостях. |
|
|
||
mI |
m2 |
mI |
|
m2 |
mс |
|
|
mс |
|
l |
|
rI |
|
r2 |
|
|
rС |
||
|
|
|
||
|
|
r1 |
|
|
|
|
|
|
|
l2 |
|
|
|
rД |
l3 |
m3 |
mд |
r3 |
mд |
|
|
|
||
|
|
m3 |
|
|
l4 |
|
а) |
|
|
|
|
|
б) |
|
|
|
|
|
|
|
|
Д2 |
|
D3 |
|
M3 |
D2 |
|
|
|
|
|
|
|
M2 |
|
|
|
|
|
Mд |
|
D1 |
|
|
|
|
|
|
M1 |
|
|
|
DМ |
|
|
|
DС |
|
|
|
в) |
|
|
|
|
|
|
г) |
Рис. 11.6. Полное уравновешивание вала: схемы размещения масс (а) и (б); план моментов (в) и план дисбалансов (г)
266

Первый способ для своей реализации требует установки на вращающуюся деталь трех противовесов. Чаще применяется второй способ, при котором тот же результат достигается с помощью двух корректирующих масс. Рассмотрим его подробнее.
Пусть заданы несколько вращающихся в разных плоскостях масс (рис.11.6) .Подсчитаем дисбалансы этих масс:
D1 m1 r1, D2 m2 r2 , D3 m3 r3 .
На валу левее всех этих масс наметим точку А, через которую далее пройдет корректирующая плоскость с размещенным в ней противовесом. Посчитаем моменты от сил инерции вращающихся масс относительно этой точки:
M1 D1 l1 , M2 D2 l2 , M3 D3 l3 .
В связи с тем, что момент Мi есть вектор, сложим геометрически все моменты, т.е. построим план моментов. Замыкающий этот многоугольник вектор МД и будет моментом относительно точки А, дисбаланс DM которого обеспечивает динамическое уравновешивание системы, т.к.
|
MD DM lD mD rD lD , |
то |
lD MD mD rD . |
Подбираем из конструктивных соображений mD или rD, определяем размеры и место установки противовеса с массой mD.
Далее, чтобы уравновесить систему статически, строим план дисбалансов и ведем дальнейший расчет.
Для того, чтобы противовес, обеспечивающий статическое уравновешивание, не нарушил динамическую уравновешенность, помещаем его в плоскость, проходящую через точку А.
Идея третьего способа основывается на том, что любое число вращающихся масс может быть уравновешено двумя противовесами, расположенными в двух произвольных плоскостях. Если сравнивать результаты уравновешивания вторым и третьим способами, то они будут совершенно одинаковы при условии, что расстояние между плоскостями установки противовесов в обоих случаях принимается одинаковым.
11.3.4. Балансировка готовых деталей
Очень часто приходится уравновешивать готовые детали, которые теоретически уравновешены, а фактически вследствие неточности изготовления, сборки, неоднородности материала и т.п. остаются уравновешенными неполностью.
267

Уравновешивание готовых деталей производится на специальных станках и называется балансировкой.
Противовес
Рис. 11.7. Устройство для статической балансировки
Различают статическую, моментную и динамическую балансировки. При статической балансировке в большинстве устройств, предназначенных для этой цели, используются свойства центра масс вращающейся детали занимать при устойчивом равновесии низшие
положения.
Простейшее устройство для статической балансировки состоит из двух закаленных призм 1 и 2 (рис. 11.7), установленных строго горизонтально и параллельно друг другу. На эти параллели кладется балансируемая деталь 3. Если деталь статически уравновешена, то на призмах она будет находиться в безразличном равновесии. Если деталь статически не уравновешена, то она будет перекатываться по призмам до тех пор, пока центр тяжести не займет низшее положение.
Величина дисбаланса такой детали определяется с помощью кусочка пластилина, который размещается на определенном расстоянии на противоположной стороне детали по отношению к ее центру тяжести. Масса противовеса подбирается по результатам нескольких испытаний.
Повысить точность статической балансировки можно размещением вращающейся детали на двухдисковом устройстве (рис. 11.8) или с помощью балансировочных весов, описание которых приводится в специальной технической литературе.
 1 2 3
1 2 3


 4
4
Рис. 11.8. Двухдисковое устройство для статической балансировки:
1 |
268 |
– основание |
– уравновешиваемая деталь; 2, 3 – диски; 4 |

Динамическая балансировка (как и моментная) производится на специальных станках. Существует много различных конструкций балансировочных станков. Принцип работы большинства из них основан на применении эффекта резонанса.
Одна из таких схем балансировочного станка показана на рис. 11.9. При этом вращающаяся деталь 1 размещается на подшипниках рамы 2, которая шарнирно соединена со станиной 3. Другая опора 4 рамы упругая. Вследствие этого рама может покачиваться относительно неподвижной оси О. Вместе с рамой будет покачиваться относительно станины и
ДА
1
ω
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ДВ |
2 |
||
3 |
4 |
|
5 |
||
О |
||
В |
А |
Рис. 11.9. Схема устройства для динамической балансировки: 1 – ротор; 2 – рама; 3 – станина; 4 – упругая опора; 5 – индикатор
балансируемая деталь.
Приведем деталь во вращение.
Момент М = D ∙ l ∙cos ω t вызовет колебания системы в вертикальной плоскости. Амплитуда этих колебаний замеряется индикатором 5. При частоте вращения детали, равной собственной частоте колебаний системы, наступит резонанс.
При этом с достаточной степенью точности можно считать, что амплитуда вынужденных колебаний пропорциональна дисбалансу Д. Величина этого дисбаланса может изменяться путем размещения на детали добавочных грузов. По результатам нескольких пусков рассчитывается масса и место размещения противовеса в плоскости коррекции А. Для того, чтобы определить параметры противовеса, размещаемого в плоскости В, деталь нужно снять с подшипников и переставить так, чтобы с осью шарнира О на этот раз была бы совмещена плоскость коррекции А. После этого по результатам новых пусков определяются параметры противовеса в плоскости коррекции В.
269