

22 Графическая иллюстрация реверса днв введением в цепь якоря дополнительного сопротивления при наличии активного момента сопротивления. Необходимые пояснения.
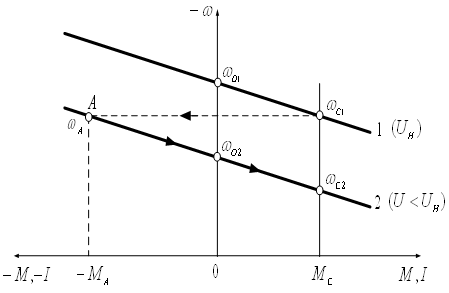
На рис. 2.15 проиллюстрировано применение режима противовключения для остановки и реверса двигателя.
Применение режима противовключения для остановки и реверса двигателя
Для реверса
двигателя с подъема ( )
на опускание груза (
)
на опускание груза ( )
не обходимо перейти с природной х-ки 1
на реостатную 2. Т.к. скорость не может
измениться мгновенно двигатель переходит
в точку а
. Затем скорость уменьшается по х-ке 2
до нуля (точка в)
(торможение двигателя), затем переходит
в режим реверса и достигает статической
точки с
(реверсивный
разгон). Х-ка 3 обеспечивает торможение.
)
не обходимо перейти с природной х-ки 1
на реостатную 2. Т.к. скорость не может
измениться мгновенно двигатель переходит
в точку а
. Затем скорость уменьшается по х-ке 2
до нуля (точка в)
(торможение двигателя), затем переходит
в режим реверса и достигает статической
точки с
(реверсивный
разгон). Х-ка 3 обеспечивает торможение.
23. Графическая иллюстрация перехода ДНВ с двигательного режима в режим генераторного торможения изменением полярности напряжения питания якоря при наличии активного момента сопротивления. Необходимые объяснения.
На рисунке проиллюстрировано применение генераторного режима для уменьшения скорости двигателя.
 Рисунок
2.13 – Застосування генераторного режиму
для зниження швидкості
Рисунок
2.13 – Застосування генераторного режиму
для зниження швидкості
Механическая х-ка 1 соответствует двигательному режиму, – рабочая точка. Что бы попасть в точку не обходимо уменшить напряжение. Переход будет проходить как показано на рисунке: сначала в точку А (скорость не может измениться мгновенно) и затем в .
При дальнейшем снижении U работу машину можно остановить в рамках генераторного режима.(рис.2.14).
Р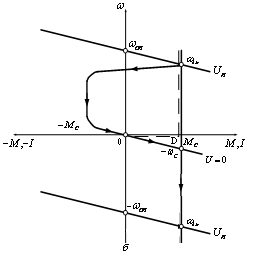 исунок
2.14 – Застосування генераторного режиму
двигуна для зупинки механізму: а – при
ступінчастому зменшенні напруги
живлення, б- при плавному зменшенні
напруги
исунок
2.14 – Застосування генераторного режиму
двигуна для зупинки механізму: а – при
ступінчастому зменшенні напруги
живлення, б- при плавному зменшенні
напруги
При активном моменте сопротивления (непрерывный график ) произойдет в точках пересечений графиков с осью моментов (ω=0). При дальнейшем плавном понижении напряжения цепи якоря двигатель можно вывести на номинальную х-ку в генераторном режиме (рис. в).
24. Графическая иллюстрация реверса днв при изменении полярности напряжения питания якоря при наличии реактивного момента сопротивления.
На рис. представлены механические характеристики при реверсе противовключением. Здесь при изменении полярности напряжения, подводимого к якорю, и включении дополнительного резистора в цепь якоря , двигатель, работавший до этого со скоростью, соответствующей точке А квадранта I, переходит на работу по характеристике ВС (индуктивностью якоря пренебрегаем) в точку В квадранта II. Сохранение неизменной
скорости в первый момент переключения двигателя обусловливается механической инерцией электропривода. Под влиянием тормозного момента скорость двигателя уменьшается соответственно характеристике ВС до нулевого значения. При скорости, равной нулю (точка С, рис. 3.9), двигатель в случае торможения для останова, а не реверса, должен быть отключен от сети. Если такого отключения не произойдет, скорость двигателя начнет увеличиваться в обратном направлении (характеристика CD квадранта III). Вместе с изменением направления вращения изменяет направление ЭДС якоря, которая снова в двигательном режиме направлена встречно напряжению сети. Теперь привод вновь работает в двигательном режиме с постоянной угловой скоростью, будучи переведенным на естественную характеристику при противоположном направлении вращения (точка F характеристики FE).
Если еще раз изменить полярность напряжения на выводах якоря, то двигатель вновь перейдет в режим противовключения. Торможение и последующее увеличение угловой скорости двигателя в обратном направлении происходят по характеристике GKL.
Изменение направления вращения двигателя может быть осуществлено двояко. Чтобы получить режим противовключения, можно переключить либо обмотку якоря, либо обмотку возбуждения. Однако переключение обмотки возбуждения практикуется реже, так как вследствие значительной ее индуктивности время торможения возрастает по сравнению с временем торможения при переключении обмотки якоря.
25. Выходные уравнения и структурная схема электромеханического преобразователя ДНВ при U=var, Uув=var. Необходимые пояснения.
; (2.1) ; (2.2)
; (2.3) , (2.4)
Для анализа воспользуемся системой уравнений (2.1)…(2.4), обозначив d/dt=p, запишем их в виде:
 ;
(2.48)
;
(2.48)
 ;
(2.49)
;
(2.49)
где
 – коэффициент пропорциональности между
магнитным потоком и током
– коэффициент пропорциональности между
магнитным потоком и током
возбуждения при ненасыщенной магнитной системы двигателя;
– магнітний потік,
 ;
;
 – електромагнітна
стала часу обмотки збудження,
– електромагнітна
стала часу обмотки збудження,
 ;
;
 – електромагнітна
стала часу кола якоря,
– електромагнітна
стала часу кола якоря,
 .
.
 На
схеме представлены два возможных канала
управления от источника напряжения -
канал управления полем двигателя,
которому отвечает управляющее воздействие
,
и канал управления якорной цепью с
управляющим воздействием U.
Со схемы видно, что при отсутствии
реакции якоря процессы в цепи возбуждения
протекают независимо от процессов в
якорной цепи, а процессы в якорной цепи
зависят от изменений магнитного потоку
двигателя.
На
схеме представлены два возможных канала
управления от источника напряжения -
канал управления полем двигателя,
которому отвечает управляющее воздействие
,
и канал управления якорной цепью с
управляющим воздействием U.
Со схемы видно, что при отсутствии
реакции якоря процессы в цепи возбуждения
протекают независимо от процессов в
якорной цепи, а процессы в якорной цепи
зависят от изменений магнитного потоку
двигателя.
26. Рівняння і структурна схема електромеханічного перетворювача ДНЗ при U=var і Uзб=const. Необхідні пояснення.
Розглянуті раніше характеристики двигуна отримані в припущенні, що двигун живиться від безкінечно потужної мережі або від всякого іншого джерела з внутрішнім опором = нулю. Приступаючи до вивчення динамічних властивостей, необхідно мати на увазі, що у регульованому електроприводі можливе живлення якірного кола двигуна також від перетворювачів з властивостями джерела струму.
Для аналізу скористуємось системою рівнянь (2.1)…(2.4). Позначивши d/dt=p, запишемо їх у вигляді:
; ;
,
де – коефіцієнт пропорційності між магнітним потоком і струмом збудження при ненасиченій магнітній системі двигуна;
– магнітний
потік,
 ;
;
 – електромагнітна
стала часу обмотки збудження,
– електромагнітна
стала часу обмотки збудження,
 ;
;
– електромагнітна стала часу кола якоря, .
С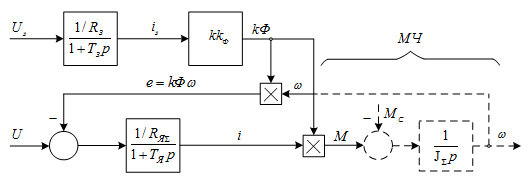 труктурна
схема ЕМП за рівняннями приведена на
рис.
(безперервні
лінії). На схемі представлені два можливих
канали керування при живленні від
джерела напруги – канал керування полем
двигуна, якому відповідає керуючий
вплив
труктурна
схема ЕМП за рівняннями приведена на
рис.
(безперервні
лінії). На схемі представлені два можливих
канали керування при живленні від
джерела напруги – канал керування полем
двигуна, якому відповідає керуючий
вплив
 ,
та канал керування якірним колом з
керуючим впливом U.
,
та канал керування якірним колом з
керуючим впливом U.
Зі схеми випливає, що при відсутності реакції якоря процеси в колі збудження протікають незалежно від процесів в якірному колі, а процеси в якірному колі залежать від змін магнітного потоку двигуна.