

79)Динамические свойства асинхронного электромеханического преобразователя
Возьмём упрощенную
формулу Клосса
Для рабочего участка механической характеристики, где S<Sкр уравнение, связывающее момент и скорость АД, имеет вид:
 ,
или
,
или
 ,
где
,
где
 - модуль жесткости линеаризированной
механической характеристики, и
- модуль жесткости линеаризированной
механической характеристики, и
 -
это электромагнитная постоянная времени,
находящаяся в пределах 0,06-0,006 С
-
это электромагнитная постоянная времени,
находящаяся в пределах 0,06-0,006 С
Это значит, что в окрестностях точки статистического равновесия асинхронный ЭМП представляется апериодическим звеном. Структурная схема асинхронного ЭМП, линеаризованного в пределах рабочего участка статической механической характеристики выглядит так:
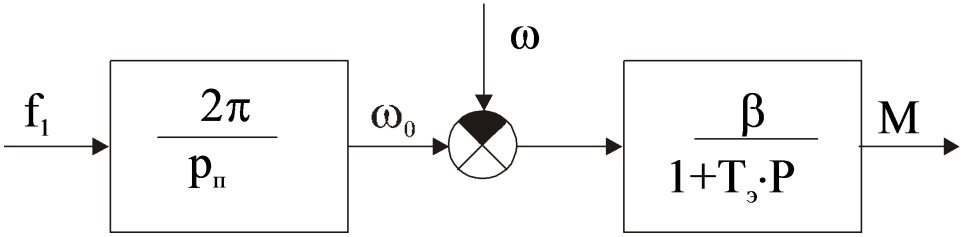
Передаточная
функция динамической жесткости в
соответствии с этой схемой имеет вид:
Сравнивая это выражение с аналогичным выражением ДНВ и структурные схемы, можно убедиться в их идентичности. Таким образом, в пределах рабочего участка механической характеристики динамические свойства АД аналогичны свойствам ДНВ. Для АД частота f1 является управляющим воздействием, аналогичным напряжению Uя, приложенному к якорной цепи ДНВ.
80. Виведення рівняння кутової х-ки синхронного двигуна з допомогою векторної діаграми.
Обратимся к упрощенной векторной диаграмме СД. Будем пренебрегать потерями в активном сопротивлении статора.

из треугABC:
 подставим
в перове равенство
подставим
в перове равенство

Учитывая,
что
 тогда
тогда

Введем

 .
.
Известно,
что


Можно
записать в виде

В явнополюсной машине для практических расчетов можно пренебречь реактивным моментом и пользоваться этой формулой
ч1.81. Вплив форсування збудження СД на навантажувальну спроможність машини. Приклади застосування.
Динамические механические характеристики, соответствующие даже сравнительно медленным изменениям момента двигателя, могут существенно отличаться от статических.
Важным достоинством синхронного двигателя является возможность регулирования реактивной мощности посредством изменения величины тока возбуждения Iв. При относительно небольшом токе возбуждения ток статора I1 отстает от приложенного напряжения на угол φ1 и из сети потребляется реактивная мощность. Увеличивая ток возбуждения можно добиться φ1=0, что соответствует потреблению из сети только активной мощности. Дальнейшее увеличение тока возбуждения Iв приводит к отдаче реактивной мощности в сеть (рис.5.1в).
Увеличение тока возбуждения, а значит и ЭДС Е приводит к увеличению момента машины, а при неизменном моменте - к уменьшению угла Θэл. Как следует из выражения для угловой характеристики синхронной машины, увеличение тока возбуждения приводит к увеличению перегрузочной способности синхронного двигателя. Поэтому форсирование возбуждения при бросках нагрузки позволяет повысить устойчивость работы двигателя в этих режимах.
82) Пояснення за допомогою вд сд впливу струму збудження на коефіцієнт потужності cosfi машини. Приклади застосування.
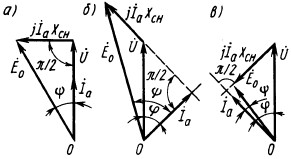
а) Угол φ = 0, cos φ = 1, Iв2 = Iвкр> Iвн
б) Угол φ отстает и больше 0, cos φ < 1, Iв = Iвн
в) Угол φ опережает и больше 0, cos φ < 1, Iв3 > Iвкр
На рисунке показаны упрощенные векторные диаграммы генератора с неявно выраженными полюсами для активной (а), активно-индуктивной (б) и активно-емкостной (в) нагрузок. При активной и активно-индуктивной нагрузках ЭДС E0>U; при активно-емкостной нагрузке ЭДС E0<U. Таким образом, в первых двух случаях при увеличении нагрузки напряжение генератора уменьшается, в третьем—увеличивается. Это объясняется тем, что при активно-емкостной нагрузке имеется продольная намагничивающая составляющая реакция якоря, а при активной и активно-индуктивной нагрузках—продольная размагничивающая составляющая (при чисто активной нагрузке угол ψ>0).