

1.Выведение уравнений электромеханической и механической характеристик днв
С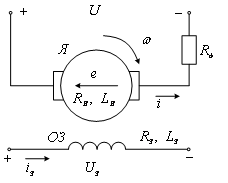 истему
уравнений, которые описывают свойства
ДНВ можно представить в виде:
истему
уравнений, которые описывают свойства
ДНВ можно представить в виде:



где
 ,
,
 – напряжения питания якоря и обмотки
возбуждения;
– напряжения питания якоря и обмотки
возбуждения;
 ,
,
 – токи якоря и возбуждения;
– токи якоря и возбуждения; ,
,
 – суммарное сопротивление цепи якоря
и сопротивление обмотки возбуждения;
(
– суммарное сопротивление цепи якоря
и сопротивление обмотки возбуждения;
( ;
;
 – сопротивление якоря;
– сопротивление якоря;
 – добавочное сопротивление);
– добавочное сопротивление);
 ,
,
 – индуктивности цепи якоря и
– индуктивности цепи якоря и
Схема включения
ДНВ обмотки возбуждения;
 – противоЭДС
– противоЭДС
ДНВ;
 – угловая скорость вращения якоря;
– угловая скорость вращения якоря;
 – магнитный поток машины;
– магнитный поток машины;
 –электромагнитный
момент;
–электромагнитный
момент;
 – конструктивный коэффициэнт ДНВ.
– конструктивный коэффициэнт ДНВ.

 – число активных
проводников обмотки якоря;
– число активных
проводников обмотки якоря;
 – число пар полюсов
машины;
– число пар полюсов
машины;
 – число параллельных
витков обмотки якоря.
– число параллельных
витков обмотки якоря.
При Ф=соnst=Фн;
 ,
откуда находим зависимости скорости
вращения ДНВ:
,
откуда находим зависимости скорости
вращения ДНВ:
- от тока якоря (электромеханическая характеристика машины)
- скоростная статическая характеристика
( =0):
=0):
 ;
;
- от электромагнитного
момента (механическая характеристика
машины)
 .
.
- механическая статическая характеристика
( =0):
=0):
. Поняття жорсткості механічної характеристики, залежність від параметрів ДНЗ.
Жесткость механической характеристики електропривода – это отношение прирощения электромагнитного момента двигателя к соответствующему приросту скорости:
 .
Обычно на робочих участках механические
характеристики двигателей имеют
отрицательную жесткость: β<0.
Линейные механические характеристики
имеют неизменную жесткость. В случае
нелинейных характеристик их жесткость
переменна и определяется в каждой точке
как касательная по угловой скорости:
.
Обычно на робочих участках механические
характеристики двигателей имеют
отрицательную жесткость: β<0.
Линейные механические характеристики
имеют неизменную жесткость. В случае
нелинейных характеристик их жесткость
переменна и определяется в каждой точке
как касательная по угловой скорости: .
Понятие жесткость может быть употребленно
и для механических характеристик
механизмов:
.
Понятие жесткость может быть употребленно
и для механических характеристик
механизмов: .
Механические характеристики
электродвигателей можно разделить на
4 основные группы:
.
Механические характеристики
электродвигателей можно разделить на
4 основные группы:
а) абсолютно жерсткая механическая характеристика (β=∞), при которой скорость с изменение момента остается неизменной. Такие характеристики имеют синхронне двигатели (прямая 1);
б) жерсткая механическая характеристика, при которой скорость с изменение момента хоть и снижается, но в малой степени. Жерсткую характеристику имеют ДНВ (прямая 2), а также АД в пределах рабочей механической характеристики (прямая 3),
в) мягкая механическая характеристика, при которой скорость с изменение момента значительно изменяется. Такую характеристику имеют ДПВ при малих загрузках (прямая 4). Для таких двигателей, как и для АД, жескость не остается постоянной для всех точек характеристик;
г) абсолютно мягкая механическая характеристика (β=0), при которой момент двигателя при изменение угловой скорости остается неизменным (пряма 5). Такую характеристику имеют ДНВ при питании якоря от источника тока или при работе в замкнуьых системах ЭП в режиме стабилизации тока якоря.

4. Отримання рівнянь статичних характеристик днз у відносних одиницях з відповідних рівнянь в абсолютних одиницях
Для
получения необходимого представления
о реальных жескостях природних
характеристик двигателей необходимо
записать уравнение механической
характеристики в относительных единицах.
Принято за базисне величины принимать
 ;
;
 ;
;
 ;
;
 ;
;
 ;
;
 .
.
Для получения скоростной характеристики в относительных единицах преобразуем уравнение:
 ,
,
где
 ;
;
 ;
;
 .
.
Окончательно
запишем: .
.
Относительный
электромагнитный момент
 ,
,
откуда
 .
.
Подставив
оношения получаем уравнение механической
характеристики в относительных
единицах: .
.
Для
природной сатической характеристики
 =1,
=1,
 =1,
=1,
 .
Тогда выплывает:
.
Тогда выплывает: ;
; .
.
Поскольку
 ,
то природная скоростная и механическая
характеристики совпадают. Совпадают
также относительные значения номинальноо
перепада скорости.
,
то природная скоростная и механическая
характеристики совпадают. Совпадают
также относительные значения номинальноо
перепада скорости.
Относительный ток КЗ обратно пропорциональный относительному току якоря
 .
.
