

34 Строительство природной механической характеристики дпв
Уравнения
і
где
электромагнитный момент
,лишь
обобщенное представление о статические
характеристики двигателя последовательного
возбуждения. При
расчетах этими уравнениями пользоваться
нельзя, поскольку машин с ненасыщенной
магнитной системой вообще в современной
практике не строят. Вследствие
того, что истинные статические
характеристики очень отличаются от
кривых, описываемых этими уравнениями,
построение характеристик приходится
вести графо - аналитическим способом.
Естественная механическая характеристика
строится на основании данных каталога,
где приводятся экспериментальные
природные характеристики: скоростная
ω(I) и силовая
М(I),
де М
– момент на валу двигателя Эти
характеристики могут даваться
относительных единицах:
 ,
,
 .
Такие характеристики называются
универсальными где
.
Такие характеристики называются
универсальными где
 ,
,
,
,
 .
За
базисные величины принимаются номинальные
данные:
.
За
базисные величины принимаются номинальные
данные:
 ,
,
 ,
,
 ,
,
 .
Номинальный
момент на валу определяется через
мощность и угловую скорость:
.
Номинальный
момент на валу определяется через
мощность и угловую скорость:

 что
образует
погрешность в построении механических
характеристик двигателя, где вместо
механического момента должен быть
электромагнитный.
Однако
последний незначительно превышает
момент на валу, что для двигателей
данного типа допустимо.
Зная
номинальные данные двигателя, можно от
универсальных кривых перейти к
характеристикам в абсолютных единицах.
Задаваясь
рядом значений тока и получая по кривой
соответствующие
значения, а по кривой
- значения легко построить
естественную механическую характеристику,
что
образует
погрешность в построении механических
характеристик двигателя, где вместо
механического момента должен быть
электромагнитный.
Однако
последний незначительно превышает
момент на валу, что для двигателей
данного типа допустимо.
Зная
номинальные данные двигателя, можно от
универсальных кривых перейти к
характеристикам в абсолютных единицах.
Задаваясь
рядом значений тока и получая по кривой
соответствующие
значения, а по кривой
- значения легко построить
естественную механическую характеристику,
 как в относительных,
так и в абсолютных единицах. Однако
необходимо помнить, что в данном случае
имеем дело не с электромагнитным
моментом, а с моментом на валу.
как в относительных,
так и в абсолютных единицах. Однако
необходимо помнить, что в данном случае
имеем дело не с электромагнитным
моментом, а с моментом на валу.
Естественная механическая характеристика двигателя последовательного возбуждения»
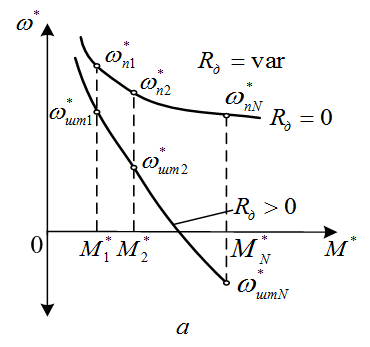
35. Побудова штучних механічних характеристик дпз при введені в коло якоря додаткового резистора. Область їх застосування.
Искусственные характеристики, получаемые введением в круг якоря дополнительных резисторов, называются реостатными характеристиками двигателя. При этом суммарное сопротивление якорной цепи увеличивается.
При
=0:
 где
где
 - внутренние сопротивление двигателя,
- внутренние сопротивление двигателя,
 ;
При
>0:
;
При
>0:
 Поделив эти два выражения получим:
Поделив эти два выражения получим:
 .
Тогда можно получить уравнение для
построения характеристики:
.
Тогда можно получить уравнение для
построения характеристики:
 .
.
В
относительных единицах:
 или
или
 ;
Для простроения механических характеристик
ток
;
Для простроения механических характеристик
ток
 с помощью универсальной кривой
с помощью универсальной кривой
 преобразуется в соответствующий момент
преобразуется в соответствующий момент
 .
.
|
Данный метод применяется в приводах для ограничения тока пуска, тормозных режимах и для регулирования скорости. Этот метод является дешевым, легко его осуществить, но этот способ крайне не экономичен из-за больших потерь.
|
36. Построение искусственных статических характеристик дпв при понижении напряжения питания. Область их применения.
Для построения
скоростных характеристик, которые
соответствуют уменьшения напряжения
питания U относительно номинального
необходимо записать уравнения естественной
и искусственных характеристик:
=0
(1) где
- внутреннее сопротивление двигателя,
;
 .
(2) Разделив при одном и том же токе
уравнение (2) на (1), получаем:
.
(2) Разделив при одном и том же токе
уравнение (2) на (1), получаем:
 .
(3) Из отношения (3) получаем расчетные
формулы для построения характеристик:
.
(3) Из отношения (3) получаем расчетные
формулы для построения характеристик: (4) В относительных единицах равенство
(4) можно преобразовать следующим образом:
(4) В относительных единицах равенство
(4) можно преобразовать следующим образом:
 або
або
 ,
(
,
( )
где относительные сопротивления
)
где относительные сопротивления
представляют собой отношение абсолютных сопротивлений к номинальному сопротивлению двигателя. Сопротивление двигателя состоит из сопротивлений якоря и обмотки возбуждения и может определяться по данным каталога или равенством
 .
.

Искусственные скоростные характеристики двигателя последовательного возбуждения: а – реостатная; бы – при уменьшении напряжения питания
Универсальные естественные
характеристики двигателя
Искусственные
механические характеристики
 двигателя
последовательного возбуждения: а –
реостатная; б – при уменьшении напряжения
питания
двигателя
последовательного возбуждения: а –
реостатная; б – при уменьшении напряжения
питания
Как и в случае двигателя независимого возбуждения, получены искусственные характеристики двигателя последовательного возбуждения используются для регуляции скорости рабочих органов механизмов, а также в пуско-тормозных режимах