

Пускові властивості сд за схемою з глухо підключеним збуджувачем. Схема, принцип дії, достоїнства та недоліки.
На обмотку статора СД подается полное напряжение сети, а цепь обмотки ротора подключается наглухо к якорю электромашинного возбудителя G (см. рис. 3.57, а) либо через разрядное сопротивление R1 (рис. 3.57,б).
Реализация наиболее простого и дешевого прямого пуска с наглухо подключенным возбудителем возможна при соблюдении 3-х условий:
– если сеть, питающая статор, имеет достаточно большую мощность и нет необходимости снижения напряжения для уменьшения пускового тока СД;
– если время разгона
СД до подсинхронной скорости ωПС
меньше времени самовозбуждения
возбудителя;
если время разгона
СД до подсинхронной скорости ωПС
меньше времени самовозбуждения
возбудителя;
– если момент статической нагрузки на валу СД меньше 40% номинального момента (М*С<0,4). В этом случае гарантируется разгон СД без “застревания” на половине синхронной скорости из-за наличия в механической характеристике асинхронного пуска провала момента на половинной скорости.
Такой провал момента в характеристике возникает из-за взаимодействия замкнутой обмотки ротора и поля статора. Если при пуске СД МС>0,4МН или время разбега его превышает время самовозбуждения возбудителя, то применяют прямой пуск с разрядным резистором R1 в обмотке возбуждения ротора СД, как это показано на рисунке 3.57, б.
Р азрядный
резистор ограничивает ток возбуждения
при пуске, улучшая при этом механическую
характеристику СД. Разрядный резистор
R1
закорачивают
при разбеге СД до подсинхронной скорости.
Этот резистор обеспечивает также
ускоренное гашение поля СД после его
отключения от сети (уменьшается
постоянная времени контура обмотки
возбуждения СД). Величина R1
выбирается
порядка
(8-10)RР,
то есть существенно больше сопротивления
обмотки возбуждения ротора СД.
азрядный
резистор ограничивает ток возбуждения
при пуске, улучшая при этом механическую
характеристику СД. Разрядный резистор
R1
закорачивают
при разбеге СД до подсинхронной скорости.
Этот резистор обеспечивает также
ускоренное гашение поля СД после его
отключения от сети (уменьшается
постоянная времени контура обмотки
возбуждения СД). Величина R1
выбирается
порядка
(8-10)RР,
то есть существенно больше сопротивления
обмотки возбуждения ротора СД.
84)Пусковые свойства сд по схеме с реле частоты. Схема, принцип действия, достоинства и недостатки
П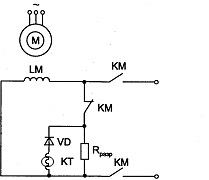 роцесс
подачи возбуждения синхронному двигателю
автоматизируется двумя способами: в
функции скорости и в функции тока.
роцесс
подачи возбуждения синхронному двигателю
автоматизируется двумя способами: в
функции скорости и в функции тока.
На схеме, приведенной на рисунке, подача возбуждения синхронному двигателю осуществляется с помощью электромагнитного реле постоянного тока КТ (реле времени с гильзой). Катушка реле включается на разрядное сопротивление Rразр через диод VD. При подключении обмотки статора к сети в обмотке возбуждения двигателя наводится ЭДС. По катушке реле КТ проходит выпрямленный ток, амплитуда и частота импульсов которого зависят от скольжения.
Подача возбуждения синхронному двигателю в функции скорости
П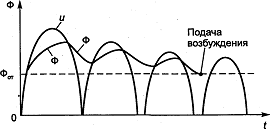 ри
пуске скольжение S = 1. По мере разгона
двигателя оно уменьшается и интервалы
между выпрямленными полуволнами тока
возрастают; магнитный поток постепенно
снижается по кривой Ф(t).При скорости,
близкой к синхронной, магнитный поток
реле успевает достигнуть значения
потока отпадания реле Фот в момент,
когда через реле КТ ток не проходит.
Реле теряет питание и своим контактом
создает цепь питания контактора КМ (на
схеме цепь питания контактора КМ не
показана).
ри
пуске скольжение S = 1. По мере разгона
двигателя оно уменьшается и интервалы
между выпрямленными полуволнами тока
возрастают; магнитный поток постепенно
снижается по кривой Ф(t).При скорости,
близкой к синхронной, магнитный поток
реле успевает достигнуть значения
потока отпадания реле Фот в момент,
когда через реле КТ ток не проходит.
Реле теряет питание и своим контактом
создает цепь питания контактора КМ (на
схеме цепь питания контактора КМ не
показана).
График изменения тока и магнитного потока в реле времени КТ
Выполняются обычно следующие функции: пуск синхронного двигателя с включенным в цепь обмотки возбуждения пусковым резистором, бесконтактное отключение пускового резистора после окончания пуска синхронного двигателя и защиту его от перегрева,автоматическую подачу возбуждения в нужный момент пуска синхронного двигателя,автоматическое и ручное регулирование тока возбуждения,защиту ротора синхронного двигателя от длительной перегрузки по току и коротких замыканий.
Недостаток: сложность схемы
85.Динамічні
характеристики синхронного електромагнітного
перетворювача.
При идеальном
холстом ходе I1q=0
и вектор
![]() (рис.
5.1в) совпадает с осью d
(Θэл=0).
Под нагрузкой ось ротора d
и составляющая Ψ1
d ,
которая в основном определяется током
возбуждения I
в , отстают
от оси вращающегося магнитного поля на
угол Θэл.
Между постоянным магнитом, которым
является возбужденный ротор, и вращающимся
магнитным полем возникают силы
взаимодействия. При малых углах Θэл
эти силы изменяются по линейному закону.
Это электромагнитное взаимодействие
подобно механической упругой связи
между полем ротора и результирующим
полем машины. Поэтому по своим динамическим
свойствам синхронный електромагнітний
преообразователь
подобен упругим механическим
системам. Рабочий участок угловой
характеристики M=f(Θэл)
можно с достаточной точностью заменить
линейной зависимостью M=kΘэл,
проходящей через точку номинального
режима:
(рис.
5.1в) совпадает с осью d
(Θэл=0).
Под нагрузкой ось ротора d
и составляющая Ψ1
d ,
которая в основном определяется током
возбуждения I
в , отстают
от оси вращающегося магнитного поля на
угол Θэл.
Между постоянным магнитом, которым
является возбужденный ротор, и вращающимся
магнитным полем возникают силы
взаимодействия. При малых углах Θэл
эти силы изменяются по линейному закону.
Это электромагнитное взаимодействие
подобно механической упругой связи
между полем ротора и результирующим
полем машины. Поэтому по своим динамическим
свойствам синхронный електромагнітний
преообразователь
подобен упругим механическим
системам. Рабочий участок угловой
характеристики M=f(Θэл)
можно с достаточной точностью заменить
линейной зависимостью M=kΘэл,
проходящей через точку номинального
режима:
![]()
Продифференцировав
выражение (5.11), получим:
![]()
Структурная
схема электромеханического преобразователя
Рис. 5.4. Механические характеристики
Передаточная функция динамической жесткости определяется выражением:
![]()
Следовательно АЧХ и ФЧХ динамической жесткости определяются выражениями:
![]() ;
;![]() (5.16)
(5.16)
![]() (5.17)
(5.17)