

28 Определение индуктивности и постоянной времени обмотки возбуждения днв. Количественная оценка постоянной времени.
Цепь возбуждения двигателя можно проиллюстрировать апериодическим графиком с постоянной времени .
Индуктивность обмотки возбуждения равна:
 ,
(2.51)
,
(2.51)
где
 – число пар полюсов машины;
– число пар полюсов машины;
 – число витков
обмотки возбуждения на один полюс;
– число витков
обмотки возбуждения на один полюс;
– номинальный поток, Вб;

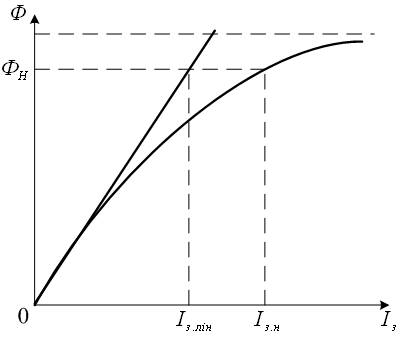 – ток возбуждения,
создающий номинальный поток при
отсутствии насыщения магнитной системы
– ток возбуждения,
создающий номинальный поток при
отсутствии насыщения магнитной системы
Рисунок 2.23 – Визначення струму з кривої намагнічування електричної машини
Значение индуктивности
 соответствует линейной части кривой
намагничивания. При насыщении индуктивность
и постоянная времени все больше
уменьшаются:
соответствует линейной части кривой
намагничивания. При насыщении индуктивность
и постоянная времени все больше
уменьшаются:
 .
.
При отсутствии дополнительного сопротивления в цепи возбуждения для двигателей от 1 до нескольких тысяч кВт постоянная времени лежит в пределах от 0,2 до 5 с, с ростом мощности она быстро увеличивается.
29. Определение индуктивности и постоянной времени якоря днв. Количественная оценка постоянной времени.
– электромагнитная постоянная времени цепи якоря, . – номинальный поток, Вб;
При питании от источника
напряжения двигатель с независимым
возбуждением работает преимущественно
при неизменном потоке
( ),при
этом уравнение механической характеристики
имеет вид равенства
,
откуда
),при
этом уравнение механической характеристики
имеет вид равенства
,
откуда
 (2.52)
(2.52)
или, в операторной
форме,
 .
(
.
( )
)
Уравнению ( ) соответствует структурная схема преобразователя, которая представлена на рис. 2.24. Она свидетельствует, что при Ф=const

Структурная схема электромеханического преобразователя при Ф = const с механической частью
электромеханический преобразователь представляет собой апериодическую звено с постоянной времени .
Индуктивность рассеяния
якорной цепи двигателя может быть
рассчитана по приблизительной формуле ,
,
где
 =0,6
для некомпенсированных
и 0,25 для
компенсированных двигателей.
=0,6
для некомпенсированных
и 0,25 для
компенсированных двигателей.
Постоянная времени якорной цепи двигателей средней и большой мощностей лежит в пределах от 0,02 до 0,1 с, причем наибольшие значения соответствуют некомпенсированным или тихоходным двигателям большой мощности.
30. Лачх и фчх динамической жесткости механической х-ки электродинамического преобразователя днв. Выводы о динамических свойствах преобразователя.
Динамические
свойства систем удобно оценивать с
помощью логарифмических х-к: ФЧХ -
 ;
ЛАЧХ -
;
ЛАЧХ -
 .
.
Логарифмическая
амплитудная частота х-ки при
 :
:
 . (2.67)
. (2.67)
Асимптоты ЛАЧХ динамической жесткости можно изобразить двумя прямыми линиями. (рис. 2.29): при малых частотах горизонтальной, при больших наклонной (20 децибел на декаду). Пунктиром проведена ЛАЧХ по уравнению (2.67). Т.к. эти графики очень похожи, при расчетах используется приближенный график. Здесь же показана ФЧХ, которая описывается уравнением (2.65):


Из анализа графиков
можно сделать вывод, что электромагнитная
инерция вызывает снижение динамической
жесткости и тем больше, чем выше частота принужденных колебаний. Так же сдвиг
по фазе между колебаниями скорости и
момента изменяется в пределах -1800 –
-2700
(малые и большие значения Ω
). Введение в цепь якоря дополнительного
сопротивления уменьшает
принужденных колебаний. Так же сдвиг
по фазе между колебаниями скорости и
момента изменяется в пределах -1800 –
-2700
(малые и большие значения Ω
). Введение в цепь якоря дополнительного
сопротивления уменьшает
 ,
если при этом модуль динамической
жесткости и фазовый сдвиг остаются
практически не изменными, можно без
существенных погрешностей исследовать
динамические процессы, используя
выражения статической динамической
х-ки.
,
если при этом модуль динамической
жесткости и фазовый сдвиг остаются
практически не изменными, можно без
существенных погрешностей исследовать
динамические процессы, используя
выражения статической динамической
х-ки.

Частотні характеристики динамічної жорсткості ЕМП з незалежним збудженням