

72) Виведення рівняним s(I) асинхронного двигуна для режиму динамічного
гальмування з урахуванням кривої намагничування.
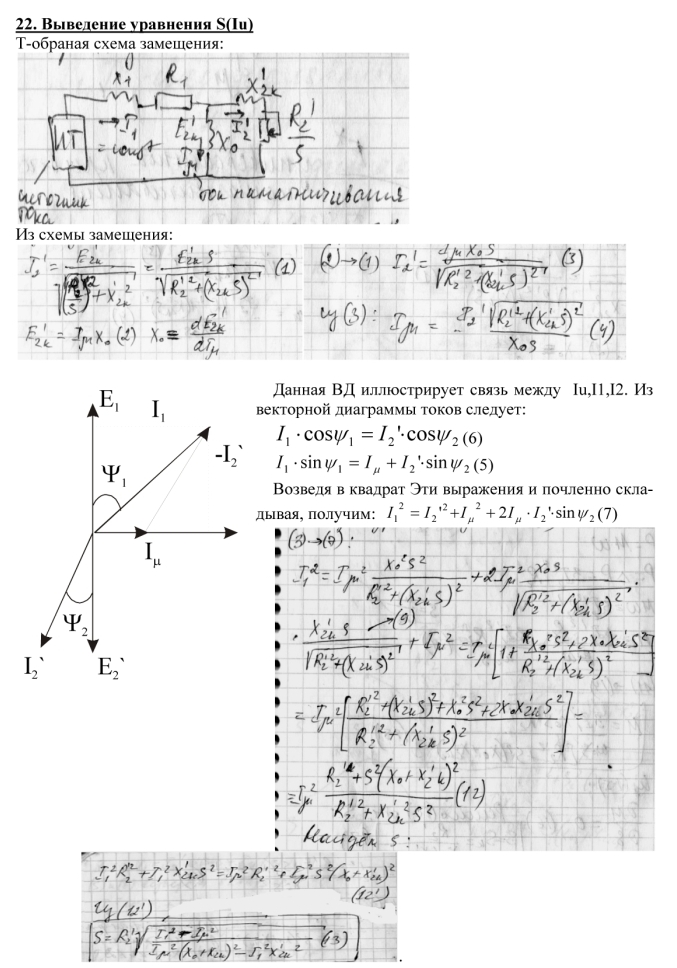
Виведення рівняння I`2(s) асинхронного двигуна для режиму динамічного гальмування з урахуванням кривої намагнічування.
Д инамическое
торможение с независимым возбуждением
получают при отключении работающего
двигателя от сети (рис. 3.40) переменного
тока и подключении его статора к источнику
постоянного тока. При таком независимом
возбуждении получают неподвижный
магнитный поток статора, который
индуктирует в обмотках вращающегося
ротора ЭДС и ток. При отключении обмотки
статора от сети небольшой магнитный
поток остаточного намагничивания
создает незначительную ЭДС и ток в
роторе.
инамическое
торможение с независимым возбуждением
получают при отключении работающего
двигателя от сети (рис. 3.40) переменного
тока и подключении его статора к источнику
постоянного тока. При таком независимом
возбуждении получают неподвижный
магнитный поток статора, который
индуктирует в обмотках вращающегося
ротора ЭДС и ток. При отключении обмотки
статора от сети небольшой магнитный
поток остаточного намагничивания
создает незначительную ЭДС и ток в
роторе.
 М
М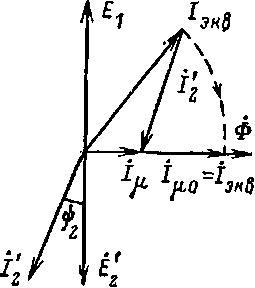 агнитодвижущая
сила, создаваемая постоянным током,
пропорциональна постоянному току, числу
витков фазы статора и зависит от схемы
соединения. Например, при соединении
статора в звезду и прохождении постоянного
тока только по двум фазам МДС постоянного
тока, определяемая геометрической
суммой МДС двух фаз, равна: Fп=√3*Iп*w1.
Исходя из Fп=
F
найдем
значение переменного тока
агнитодвижущая
сила, создаваемая постоянным током,
пропорциональна постоянному току, числу
витков фазы статора и зависит от схемы
соединения. Например, при соединении
статора в звезду и прохождении постоянного
тока только по двум фазам МДС постоянного
тока, определяемая геометрической
суммой МДС двух фаз, равна: Fп=√3*Iп*w1.
Исходя из Fп=
F
найдем
значение переменного тока
 Определив эквивалентный ток, можно
построить упрощенную векторную диаграмму
токов для асинхронного двигателя при
динамическом торможении.
Определив эквивалентный ток, можно
построить упрощенную векторную диаграмму
токов для асинхронного двигателя при
динамическом торможении.
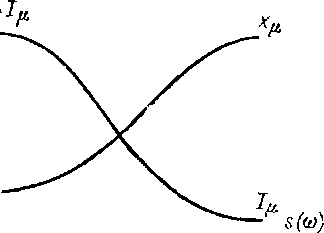
Поэтому при малых скоростях ротора и сравнительно большом эквивалентном токе двигатель в режиме динамического торможения оказывается с сильно насыщенной магнитной системой. Наоборот, при больших угловых скоростях и том же эквивалентном токе магнитная система будет ненасыщенной. Примерная зависимость приведена.
Из диаграммы
 и
совместно решая получаем
и
совместно решая получаем
74)Выведение уравнения м(s) ад для режима динамического торможения с учётом кривой намагничивания
Д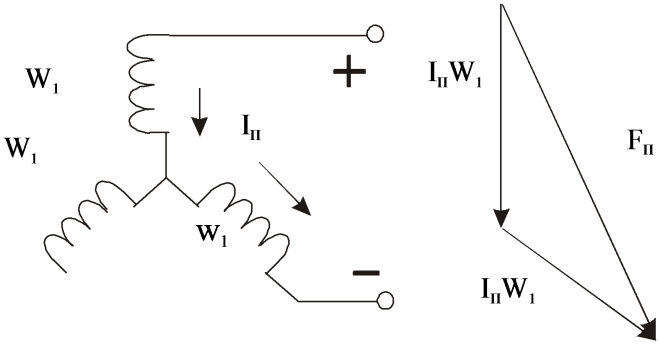
 ля
вывода уравнения механической
характеристики АД в режиме динамического
торможения предположим, что его статор
вместо постоянного питается переменным
током. При такой замене МДС создается
совместно обмотками статора и ротора
и должно быть соблюдено равенство МДС
для обоих случаев, т.е. FПОСТ=FПЕР.
Определение МДС, создаваемой постоянным
током IПОСТ
для схемы “а”, поясняет рис. и векторная
диаграмма, изображенные рядом.
ля
вывода уравнения механической
характеристики АД в режиме динамического
торможения предположим, что его статор
вместо постоянного питается переменным
током. При такой замене МДС создается
совместно обмотками статора и ротора
и должно быть соблюдено равенство МДС
для обоих случаев, т.е. FПОСТ=FПЕР.
Определение МДС, создаваемой постоянным
током IПОСТ
для схемы “а”, поясняет рис. и векторная
диаграмма, изображенные рядом.
 .
Амплитуда МДС, создаваемой переменным
током I1
при протекании его по обмоткам статора:
.
Амплитуда МДС, создаваемой переменным
током I1
при протекании его по обмоткам статора:
 .
Исходя из условия
.
Исходя из условия

 .
Отсюда:
.
Отсюда:
 , а
, а
 .
Напряжения и мощность
.
Напряжения и мощность
 :
:
 .
При динамическом торможении магнитный
поток при изменении скольжения меняется
вследствие непрерывного изменения
результирующей МДС, складывающейся из
неизменной МДС статора (постоянного
тока) и меняющейся МДС ротора (переменного
тока переменной частоты). Результирующий
намагничивающий ток, приведенный к
числу витков обмотки статора
.
При динамическом торможении магнитный
поток при изменении скольжения меняется
вследствие непрерывного изменения
результирующей МДС, складывающейся из
неизменной МДС статора (постоянного
тока) и меняющейся МДС ротора (переменного
тока переменной частоты). Результирующий
намагничивающий ток, приведенный к
числу витков обмотки статора
 .
Из векторной диаграммы токов следует:
.
Из векторной диаграммы токов следует:
 ,
,
 .Возведя в квадрат Эти выражения и
почленно складывая, получим:
.Возведя в квадрат Эти выражения и
почленно складывая, получим:
 .Намагничивающий
ток равен
.Намагничивающий
ток равен
 .В
приведенной машине
.В
приведенной машине
 ,
где E2’
– ЭДС ротора при синхронной скорости
0,
соответствующей частоте сети. При
отличной от 0,
ЭДС ротора будет равна:
,
где E2’
– ЭДС ротора при синхронной скорости
0,
соответствующей частоте сети. При
отличной от 0,
ЭДС ротора будет равна:
 ,
где
- относительная скорость или иначе –
скольжение в режиме динамического
торможения. При этом уравнение равновесия
ЭДС для роторной цепи имеет вид:
,
где
- относительная скорость или иначе –
скольжение в режиме динамического
торможения. При этом уравнение равновесия
ЭДС для роторной цепи имеет вид:
 ,
а намагничивающий ток, выраженный через
E2’:
,
а намагничивающий ток, выраженный через
E2’:
 .
Полное сопротивление ротора с учетом
того, что его индуктивное сопротивление
изменяется с изменением скорости
вращения ротора:
.
Полное сопротивление ротора с учетом
того, что его индуктивное сопротивление
изменяется с изменением скорости
вращения ротора:
 .Учитывая,
что
.Учитывая,
что
 и подставляя значения I,
sin2
и Z2’
в уравнение для I12,
из полученного соотношения находится
ток I2’,
который будет равен:
и подставляя значения I,
sin2
и Z2’
в уравнение для I12,
из полученного соотношения находится
ток I2’,
который будет равен:
 .Электромагнитный
момент, развиваемый двигателем, выраженный
через электромагнитную мощность:
.Электромагнитный
момент, развиваемый двигателем, выраженный
через электромагнитную мощность: ,
где m1
– число фаз обмотки статора. Из выражения
для М видно, что момент при динамическом
торможении определяется переменным
током I1,
эквивалентным постоянному, протекающему
по обмоткам статора.
,
где m1
– число фаз обмотки статора. Из выражения
для М видно, что момент при динамическом
торможении определяется переменным
током I1,
эквивалентным постоянному, протекающему
по обмоткам статора.