

Пневмогидравлический привод с преобразователем давления прямого действия
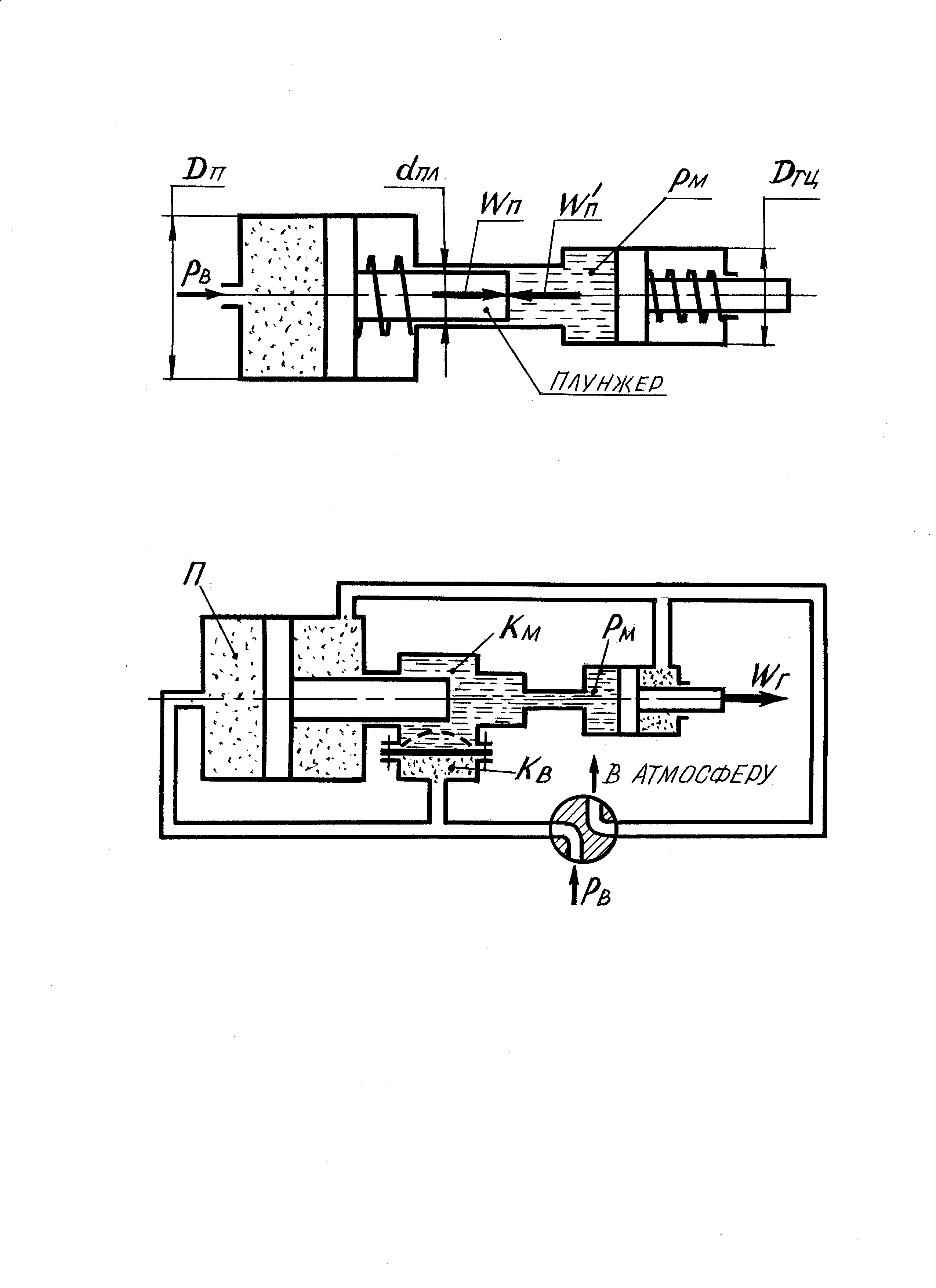
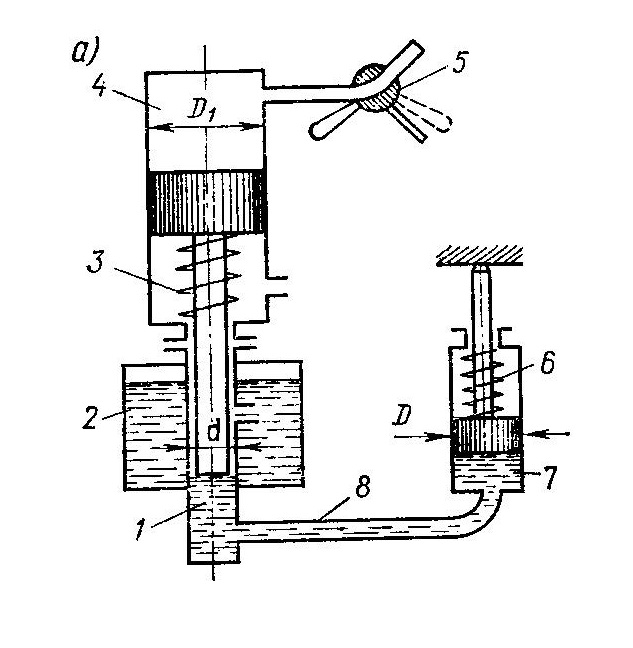
Рис. 1 – Схема пневмогидравлического привода с преобразователем давления прямого действия
![]() ,
,
![]()
где WП – усилие на плунжере (штоке) пневмоцилиндра;
W 1П – сила реакции, действующая на плунжер;
рВ – давление воздуха в пневмоцилиндре;
рМ – давление масла в гидроцилиндре;
DП – диаметр пневмоцилиндра;
dПЛ – диаметр плунжера (штока) пневмоцилиндра.
Из
уравнения (1):


i – коэффициент усиления давления, принимают i ≈ 16…21.
![]()
где WГЦ – усилие, развиваемое гидроцилиндром;
DГЦ – диаметр гидроцилиндра;
η – К.П.Д. привода, η ≈ 0,8…0,85.
Недостаток пневмогидравлического привода:
– большой ход поршня пневмоцилиндра;
– вспенивание масла при попадании воздуха в гидроцилиндр.
В пневмогидравлическом приводе с преобразователем давления прямого действия гидроцилиндр может располагаться отдельно от пневмоцилиндра. Давление масла будет передаваться по трубопроводу от полости с плунжером и маслом к гидроцилиндру.
Пневмогидравлический привод с преобразователями давления последовательного действия
Пневмогидравлический
привод с преобразователями давления
последовательного действия отличается
от преобразователей прямого действия
наличием полости низкого давления
масла
![]() .
.
а)
б)
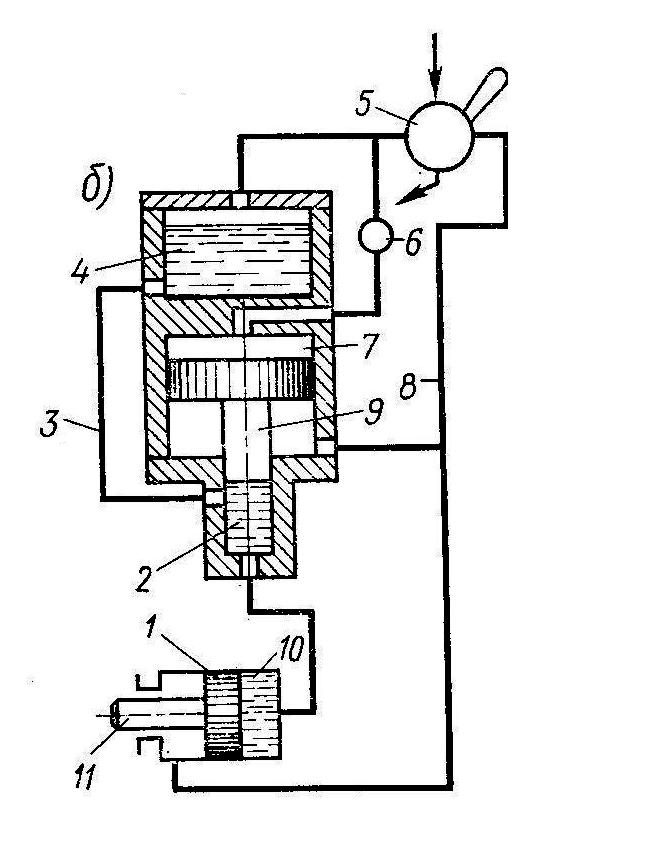
Рис. 2 – Схема пневмогидравлического привода с преобразователем давления последовательного действия
Пневмогидравлический привод с преобразователем давления последовательного действия обеспечивает:
– большее давление масла и больший ход рабочих поршней гидроцилиндров;
– ускоренный холостой ход.
Недостаток – более сложная конструкция.
Цикл работы (рис. 2 а):
1.Подача
воздуха в пневмоцилиндр П
и в камеру с мембраной
![]() .
Происходит резкое уменьшение объема
камеры
в
результате хода плунжера и прогиба
мембраны. Выполняется быстрый ход
поршня гидроцилиндра. Зажим заготовки
пока не осуществляется.
.
Происходит резкое уменьшение объема
камеры
в
результате хода плунжера и прогиба
мембраны. Выполняется быстрый ход
поршня гидроцилиндра. Зажим заготовки
пока не осуществляется.
2.Плунжер
входит в полость с диаметром, равным
диаметру плунжера, и развивает в ней
давление
![]() .
Происходит зажим заготовки.
.
Происходит зажим заготовки.
МЕХАНОГИДРАВЛИЧЕСКИЙ ПРИВОД

Рис. 3 – Схема механогидравлического привода
Давление масла создается за счет вдавливания плунжера в полость с маслом винтовым ручным механизмом.
ЭЛЕКТРОМЕХАНИЧЕСКИЙ ПРИВОД
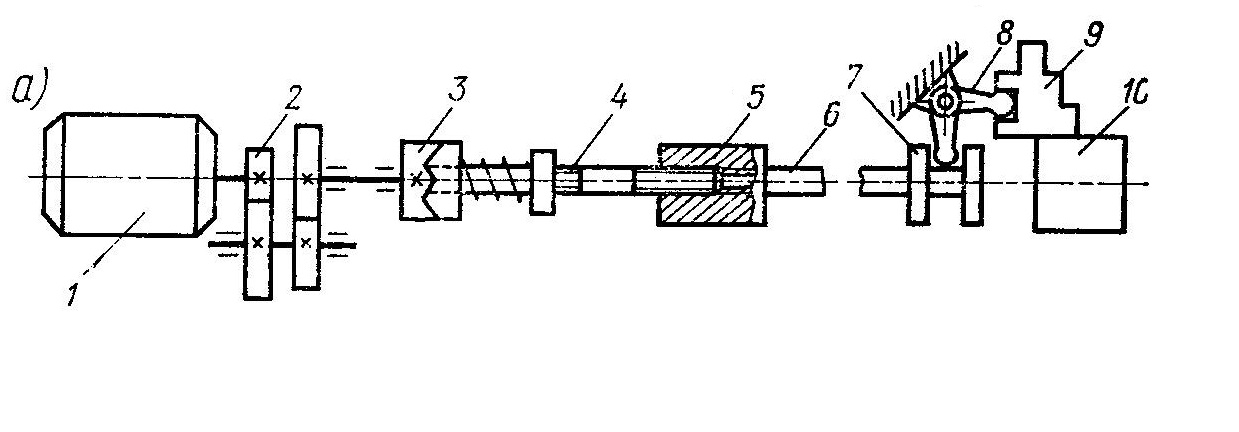
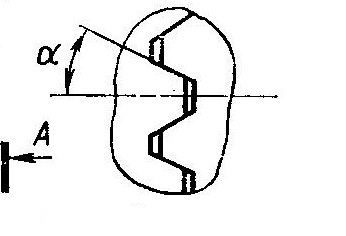
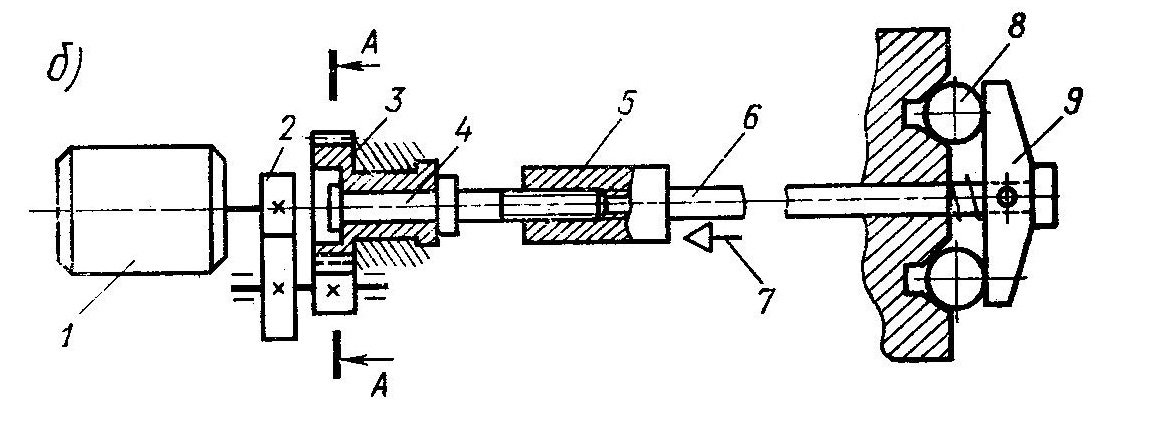
Рис. 4 – Схема электромеханического привода
ЦЕНТРОБЕЖНО-ИНЕРЦИОННЫЙ ПРИВОД

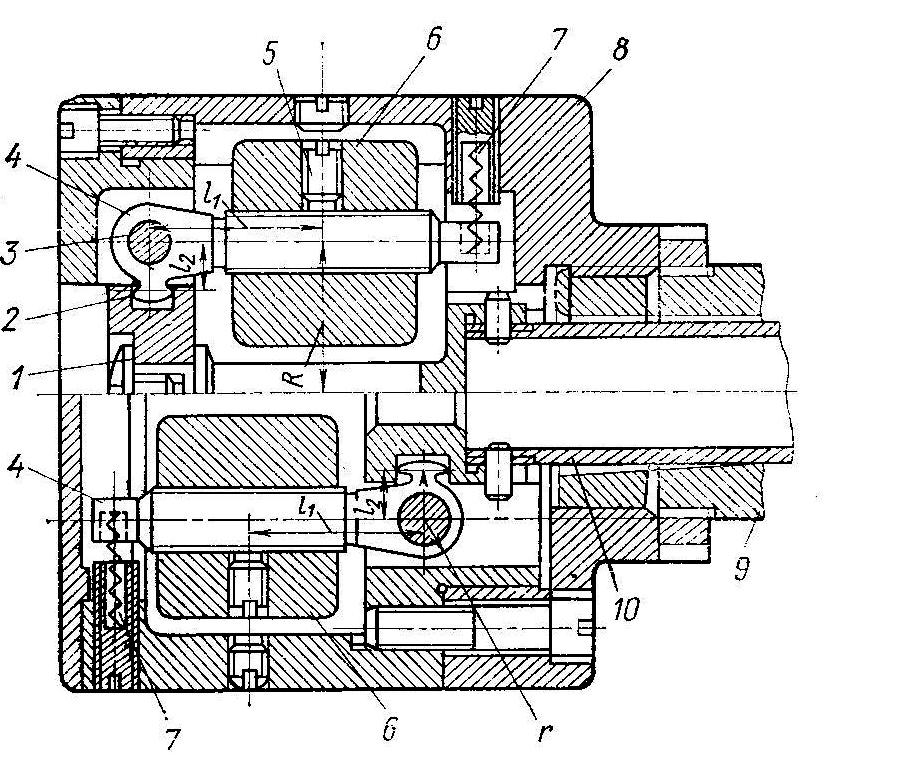
Рис. 5 – Схема центробежно-инерционного привода
МАГНИТНЫЙ И ЭЛЕКТРОМАГНИТНЫЙ ПРИВОДЫ
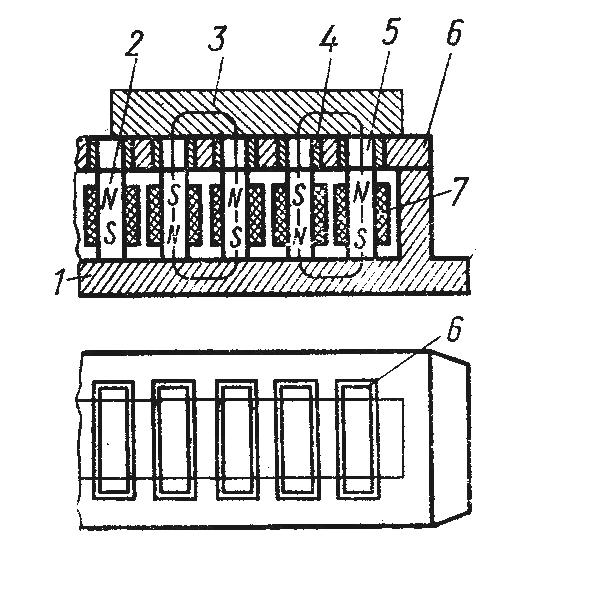
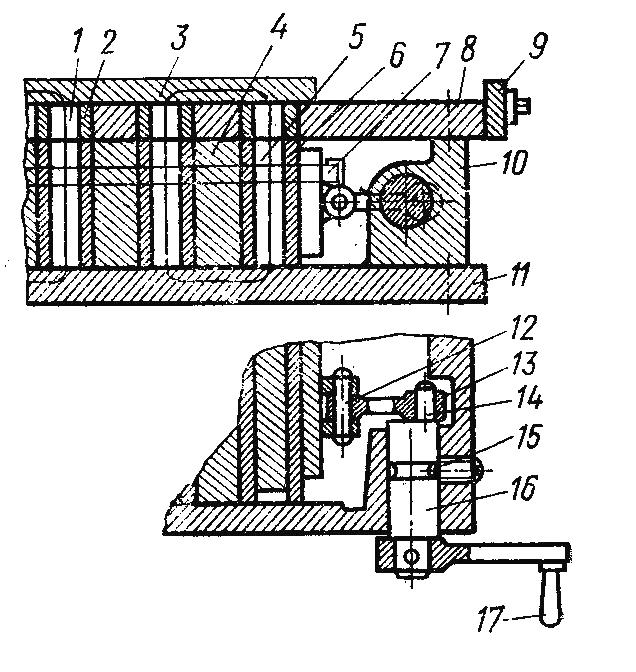
Рис. 6 – Схема магнитного привода
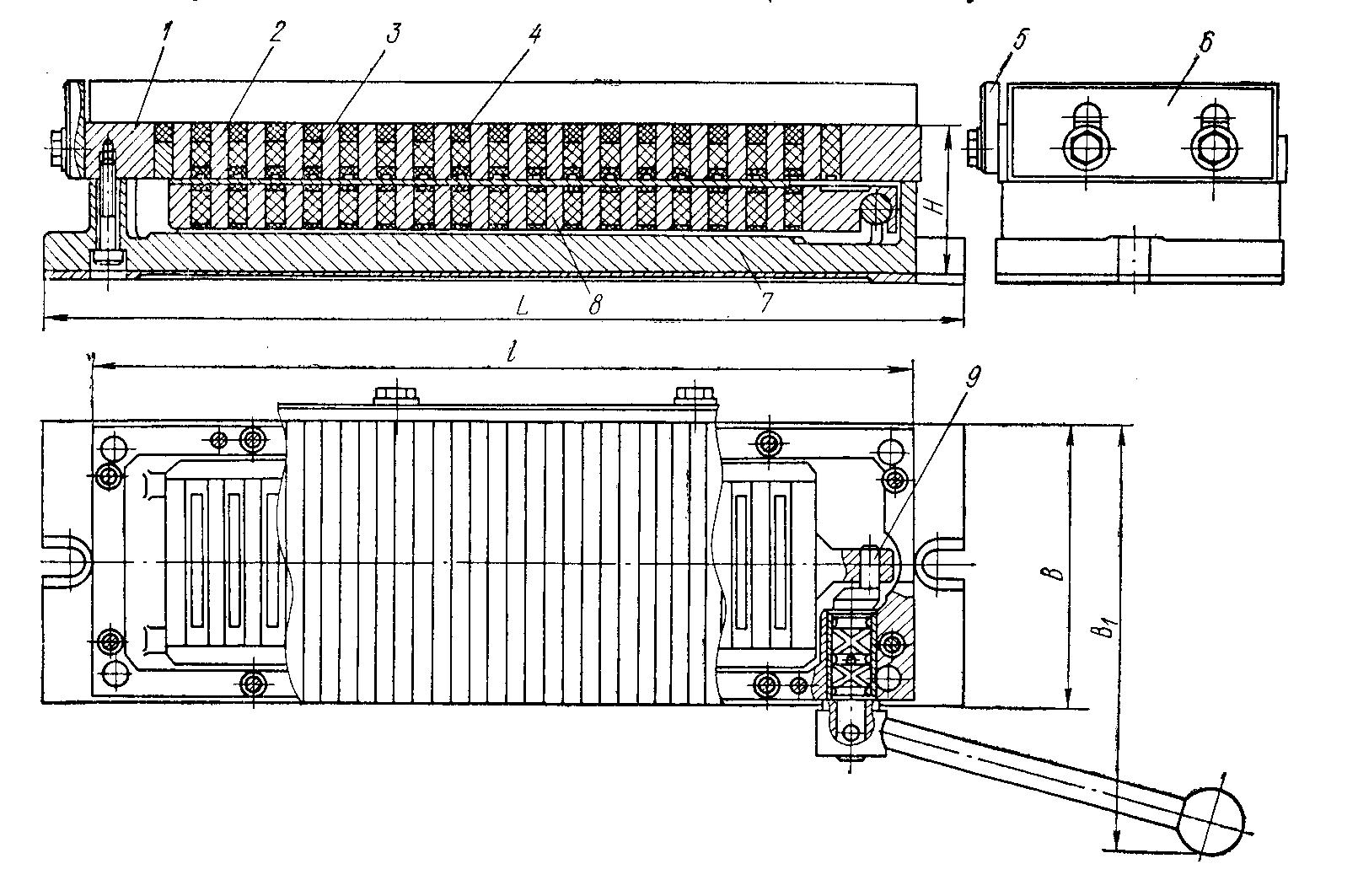
Рис. 7 – Магнитная плита
Сила W создается магнитным потоком.
ПРИВОД ОТ СИЛ РЕЗАНИЯ

Рис. 8 – Схема привода от сил резания
ПРИВОД ОТ ДВИЖУЩИХСЯ ЧАСТЕЙ СТАНКА
Рис. 9 – Схема привода от движущихся частей станка
ВАКУУМНЫЙ ПРИВОД
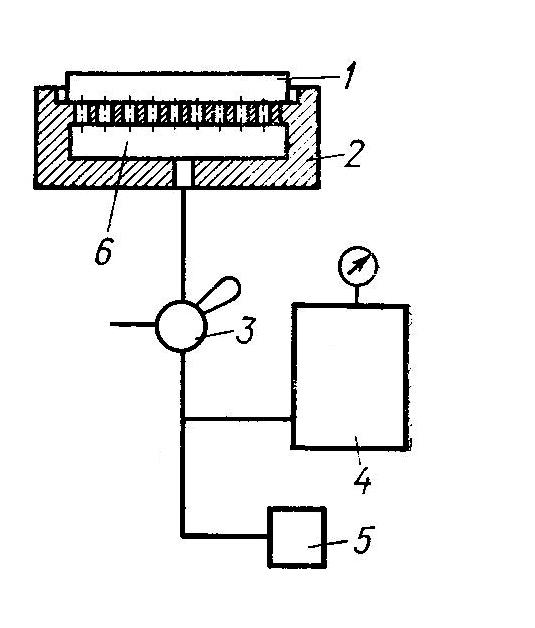
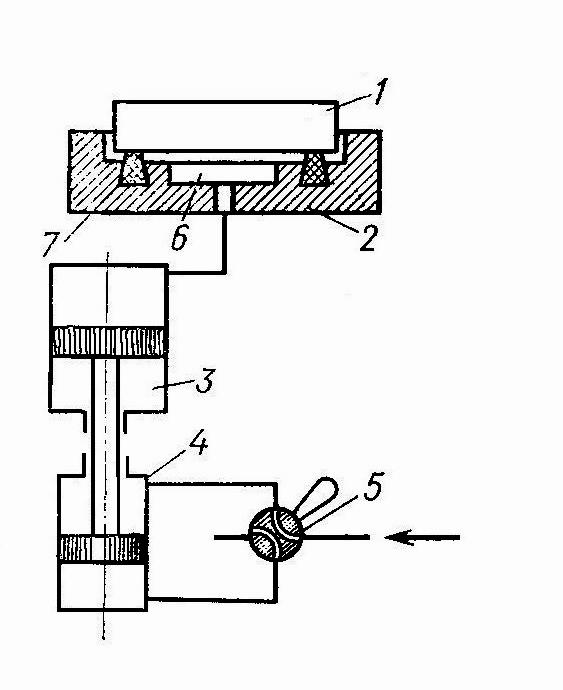
Рис. 10 – Схема вакуумного привода
Лекция 14
НАПРАВЛЯЮЩИЕ, НАСТРОЕЧНЫЕ, ВСПОМОГАТЕЛЬНЫЕ И БАЗОВЫЕ ЭЛЕМЕНТЫ (КОРПУСА) ПРИСПОСОБЛЕНИЙ