

14.1.2.Колебательная переходная характеристика.
Колебательная переходная характеристика (рис.14.3) описывается колебательным звеном с передаточной функцией (14.4).
 , (14.5)
, (14.5)
где
 - коэффициент
демпфирования, численное
значение
которого
лежит
в
пределах
- коэффициент
демпфирования, численное
значение
которого
лежит
в
пределах
 .
.
Дифференциальное уравнение колебательного звена, которое отвечает передаточной функции (14.5), имеет вид:
 (14.6)
(14.6)
Рис.14.3.
Определение параметров передаточной
функции колебательного звена по трем
точкам
 ,
,
где
 -
логарифмический
декремент затухания;
-
логарифмический
декремент затухания;
 - частота
колебаний.
- частота
колебаний.
Решение дифференциального уравнения колебательного звена имеет вид:
 , (14.7)
, (14.7)
где
 - степень
колебательности.
- степень
колебательности.
Искомые динамические параметры определяют из переходной характеристики (рис.14.3) по формулам:
 , (14.8)
, (14.8)
 . (14.9)
. (14.9)
Пример
14.1. Рассмотрим
таблично заданную переходную функцию
 колебательного процесса. График функции
показан на рис.14.4.
колебательного процесса. График функции
показан на рис.14.4.
Таблица 14.1
Данные переходной функции колебательного процесса
|
|
, c |
|
, c |
|
, c |
|
, c |
|
1 |
0.205 |
6 |
1.213 |
11 |
0.945 |
16 |
1.014 |
21 |
0.997 |
2 |
0.629 |
7 |
1.080 |
12 |
0.985 |
17 |
1.002 |
22 |
1.000 |
3 |
1.026 |
8 |
0.969 |
13 |
1.016 |
18 |
0.994 |
23 |
1.002 |
4 |
1.257 |
9 |
0.913 |
14 |
1.028 |
19 |
0.991 |
24 |
1.002 |
5 |
1.300 |
10 |
0.912 |
15 |
1.025 |
20 |
0.993 |
25 |
1.003 |
 ,
c
,
cНайдем параметры передаточной функции колебательного звена
 .
.
Учитывая, что процесс колебательный, то значение коэффициента демпфирования находится в диапазоне и корни характеристического уравнения комплексные.
Динамические параметры передаточной функции колебательного звена находим по выражениям:
 ;
;
 ,
,
где
 ,
,
 - точки сечения линии установившегося
значения переходной функцией.
- точки сечения линии установившегося
значения переходной функцией.
Решение дифференциального уравнения колебательного звена имеет вид:
 ,
,
где
 и
и
 из корней характеристического уравнения:
из корней характеристического уравнения:
 .
.

 - степень колебательности.
- степень колебательности.
Воспроизведенная
переходная функция
 приведена на рис.14.4.
приведена на рис.14.4.
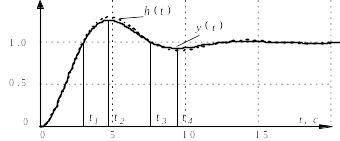
Рис.14.4. Заданный и воспроизведенный колебательные процессы
Относительная
погрешность воспроизведенной функции
в точке
 составляет 3,16%, в точке
составляет 3,16%, в точке
 - 2,6%.
- 2,6%.
При анализе динамических процессов в системах электропривода дифференциальное уравнение колебательного процесса записывают в виде:
 . (14.10)
. (14.10)
Введем
к
рассмотрению
динамические
параметры
 и
,
что
однозначно
связанные
с
и
,
что
однозначно
связанные
с
 и
и
 такими
выражениями:
такими
выражениями:
угловая частота недемпфированных колебаний, которые определяют масштаб времени процесса
 ;
;относительный коэффициент затухания колебаний, которое определяет колебательность процесса
 .
.
Из этих соотношений можно получить:
 , (14.11)
, (14.11)
 . (14.12)
. (14.12)
Рис.14.5.
К
определению параметров передаточной
функции колебательного звена
 ;
;
 ;
;
 .
.
В
первом
интервале
кривая
разгона
(рис.14.5.)
будет
резко
колебательной
( )
и
по величине
перерегулирования
может
быть
определенная
величина
:
)
и
по величине
перерегулирования
может
быть
определенная
величина
:
 (14.13),
(14.13),
где
 - порядковый
номер
экстремума,
- порядковый
номер
экстремума,
 - ордината
графика
в точке
экстремума.
- ордината
графика
в точке
экстремума.
Угловая частота колебаний определяется из выражения
 , (14.14)
, (14.14)
где - период колебаний.
Пример 14.2. Рассмотрим таблично заданную переходную функцию колебательного процесса. График функции показан на рис.14.6.
Таблица 14.2.
Данные переходной функции колебательного процесса
, c |
|
, c |
|
, c |
|
, c |
|
, c |
|
1 |
0.205 |
6 |
1.213 |
11 |
0.945 |
16 |
1.014 |
21 |
0.997 |
2 |
0.629 |
7 |
1.080 |
12 |
0.985 |
17 |
1.002 |
22 |
1.000 |
3 |
1.026 |
8 |
0.969 |
13 |
1.016 |
18 |
0.994 |
23 |
1.002 |
4 |
1.257 |
9 |
0.913 |
14 |
1.028 |
19 |
0.991 |
24 |
1.002 |
5 |
1.300 |
10 |
0.912 |
15 |
1.025 |
20 |
0.993 |
25 |
1.003 |
Найдем параметры передаточной функции колебательного звена представленной в виде:
 .
.
Динамические
параметры звена найдем на первом
полупериоде колебаний. Для этого
промежутка: порядковый номер экстремума
 ,
относительная величина перерегулирования
,
относительная величина перерегулирования
 .
.
Параметр определим как
 .
.
Период колебаний
 .
.
Угловая частота колебаний
 .
.
Постоянные времени передаточной функции
 ;
;
 .
.
Воспроизведенная переходная функция приведена на рис.14.6.
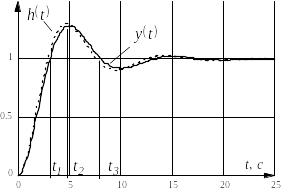
Рисунок 14.6 - Заданный и воспроизведенный колебательные процессы
№ |
y(x) |
x' |
y' |
b0 |
b1 |
1 |
|
x |
y |
b0` |
b1` |
2 |
|
x |
1/y |
b0` |
b1` |
3 |
|
1/x |
y |
b0` |
b1` |
4 |
|
x |
x/y |
b0` |
b1` |
5 |
|
x |
lg y |
10b0` |
10b1` |
6 |
|
x |
ln x |
exp(b0`) |
b1` |
7 |
|
x |
lg y |
10b0` |
b1` |
8 |
|
|
|
1/y |
b1` |
9 |
|
lg x |
lg y |
10b0` |
b1` |
10 |
|
lg x |
y |
b0` |
b1` |
11 |
|
ln x |
y |
b0` |
b1` |
12 |
|
x |
1/y |
1/b1` |
b0`/b1` |
13 |
|
1/x |
1/y |
1/b1` |
b0`/b1` |
14 |
|
1/x |
lg y |
10b0` |
b1` |
15 |
|
xn |
y |
b0` |
b1` |















