

8.3. Метод хорд.
Рассматриваемый метод так же, как и метод дихотомии, предназначен для уточнения корня на интервале [а, и], на концах которого левая часть решаемого уравнения f(x) принимает резные знаки.
Очередное приближение теперь в отличие от метода дихотомии берем не в середине отрезка, а в точке xl где пересекает ось абсцисс прямая линия, проведенная через точки f(a) и f(b) (рис. 8.2).
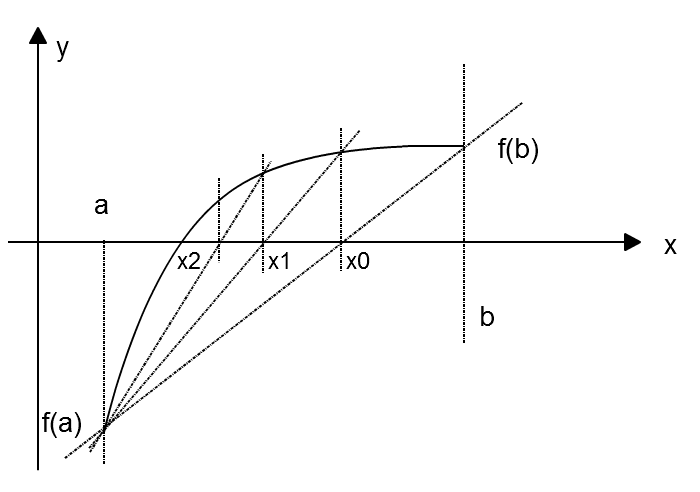
Рисунок 8.2 – Пояснение к решению нелинейного уравнения методом хорд.
Уравнение прямой линии, проходящей через точки f1= f(a) и f2 = f(b), запишем в общем виде
у(х) = kх + с.
Коэффициенты к и с уравнения этой прямой определим из условий
f1 = kа + с; f2 = kb + с.
Вычитал левые и правые части последних соотношений, получим
Точку пересечения прямой у(х) с осью абсцисс получим, приравнивая у(х) нулю

В зависимости от знака функции в уточненной точке x1 на основании теоремы Больцано-Коши уточняем, какой отрезок будет использован для следующего шага поиска.
Процесс поиска корня останавливается тогда, когда расстояние между очередными приближениями станет меньше заданной погрешности ε:

 Дискуссионный
вопрос. Предположим, что график заданной
функции хотя и имеет единственный
корень, но имеет особенность: он очень
медленно изменяется в районе нуля. Какие
проблемы возникнут при использовании
метода секущих или метода половинного
деления, при отыскании корня подобной
функции?
Дискуссионный
вопрос. Предположим, что график заданной
функции хотя и имеет единственный
корень, но имеет особенность: он очень
медленно изменяется в районе нуля. Какие
проблемы возникнут при использовании
метода секущих или метода половинного
деления, при отыскании корня подобной
функции?
8.4. Метод касательных (метод Ньютона-Рафсона).
Рассмотрим графическую иллюстрацию метода (рис. 8.3).
П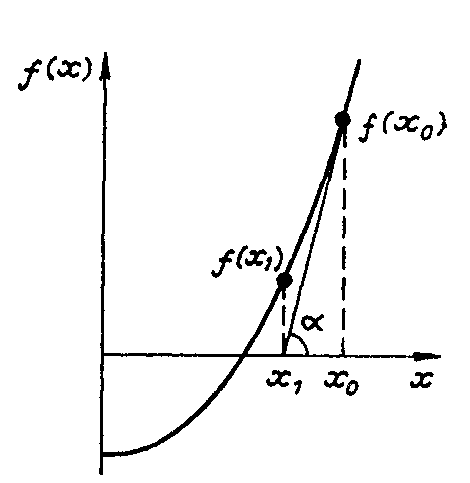 редположим,
что графическим методом определено
начальное приближение х0
к корню. В точке х0
вычислим левую часть решаемого уравнения
f0 =
f(x0),
а также производную в
этой точке f'(x0)
= tg α.
Следующее приближение к
корню найдем в точке xl,
где касательная к функции
f(x), проведенная
из точки (X0,
f0),
пересекает ось абсцисс.
Затем считаем точку х1
в качестве начальной и продолжаем
итерационный процесс. Из рис. 8.3 видно,
что таким способом можно приближаться
к корню х*. При этом с каждой итерацией
расстояние между очередным хк+1
и предыдущим хк
приближениями к корню будет уменьшаться.
Процесс уточнения корня закончим, когда
выполнится условие
редположим,
что графическим методом определено
начальное приближение х0
к корню. В точке х0
вычислим левую часть решаемого уравнения
f0 =
f(x0),
а также производную в
этой точке f'(x0)
= tg α.
Следующее приближение к
корню найдем в точке xl,
где касательная к функции
f(x), проведенная
из точки (X0,
f0),
пересекает ось абсцисс.
Затем считаем точку х1
в качестве начальной и продолжаем
итерационный процесс. Из рис. 8.3 видно,
что таким способом можно приближаться
к корню х*. При этом с каждой итерацией
расстояние между очередным хк+1
и предыдущим хк
приближениями к корню будет уменьшаться.
Процесс уточнения корня закончим, когда
выполнится условие
|xk + 1- хk| < ε
где ε - допустимая погрешность определения корня.
Из геометрических соотношений рис. 8.3 получим основную формулу метода Ньютона

Метод Ньютона обладает высокой скоростью сходимости. Обычно абсолютная точность решения 10-5 - 10-6 достигается через 5-6 итераций.
Недостатком метода является необходимость вычисления на каждой итерации не только левой части уравнения, но и ее производной.
Можно, несколько уменьшив скорость сходимости, ограничиться вычислением производной f'(x) только на первой итерации, а затем вычислять лишь значения f(x), не изменяя производной f'(x). Это алгоритм так называемого модифицированного метода Ньютона.
Лекция 9. Численное интегрирование и дифференцирование.
Ставится задана вычислить интеграл вида
 (9.1)
(9.1)
где а и b - нижний и верхний пределы интегрирования; f(x) – непрерывная функция на отрезке [а, b].
К численному интегрированию обращаются тогда, когда нельзя через элементарные функции аналитически записать первообразную интеграла (9.1) или когда подобная запись имеет сложный вид.
Сущность большинства методов вычисления определенных интегралов состоит в замене подынтегральной функции f(x) аппроксимирующей функцией φ(x), для которой можно легко записать первообразную в элементарных функциях, т.е.

где S - приближенное значение интеграла; R - погрешность вычисления интеграла
Используемые на практике методы численного интегрирования можно сгруппировать в зависимости от способа аппроксимации подынтегральной функции. Дадим краткую характеристику групп наиболее распространенных методов.
Методы Ньютона-Котеса основаны на полиномиальной аппроксимации подынтегральной функции. Методы этого класса отличаются друг от друга степенью используемого полинома, от которой зависит количество узлов, где необходимо вычислить функцию f(x). Алгоритмы методов просты и легко поддаются программной реализации.
Сплайновые методы базируются на аппроксимации подынтегральной функции сплайнами, представляющими собой кусочный полином. Методы различаются по типу выбранных сплайнов. Такие методы имеет смысл использовать в задачах, где алгоритмы сплайновой аппроксимации применяются для обработки данных.
В методах наивысшей алгебраической точности (методы Гаусса-Кристоффеля и другие) используются неравноотстоящие узлы, расположенные по алгоритму, обеспечивающему минимальную погрешность интегрирования для наиболее сложных функций при заданном количестве узлов. Методы различаются способами выбора узлов и широко используются для интегрирования, в том числе они применимы и для несобственных интегралов. Хотя из-за необходимости хранения числовых констант и стандартизации пределов интегрирования программы указанных методов требуют несколько большего объема памяти по сравнению с методами Ньютона-Котеса.
В класс специальных группируются методы, алгоритмы которых разрабатываются на основе учета особенностей конкретных подынтегральных функций, что позволяет существенно сократить время и уменьшить погрешность вычисления интегралов.