

§ 10. Трехмерные векторы (векторы в пространстве)
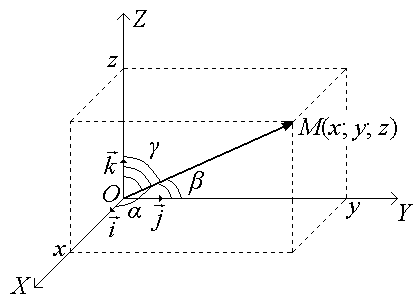
Пусть вектор задан в трехмерном пространстве:
Очевидно, что для трехмерных векторов можно дать аналогичные определения и формулы.
Радиус-вектор:
=
= (х;
у;
z)
= х
+ у
+ z![]() ,
(1)
,
(1)
|
|
=
![]() . (2)
. (2)
Произвольный вектор :
= (ах; ау; az) = ах + ау + az , (3)
|
|
=
![]() . (4)
. (4)
Вектор , имеющий начало в точке А(х1; у1; z1) и конец в точке В(х2; у2; z2):
= (х2 − х1; у2 − у1; z2 − z1) = (х2 − х1) + (у2 − у1) + (z2 − z1) , (5)
|
|
=![]() .
(6)
.
(6)
Направляющие косинусы:
,
,
![]() ,
(7)
,
(7)
причем (свойство направляющих косинусов)
+
![]() +
+
![]() = 1.
= 1.
Сумма и разность векторов:
± = (ах ± bх; аy ± by; аz ± bz) = (ах ± bх) + (аy ± by) + ( аz ± bz) . (8)
Произведение вектора на число:
т = (тах; тау; таz) = тах + тау + таz . (9)
Нормирование вектора:
0 = . (10)
Очевидно, что орты , и имеют следующие координаты:
= (1; 0; 0), = (0; 1; 0), = (0; 0; 1).
Пример. Дана точка М(5; −3; 4). Определить длину и направление ее радиус-вектора.
□ Изобразим в системе координат точку М и радиус-вектор = :
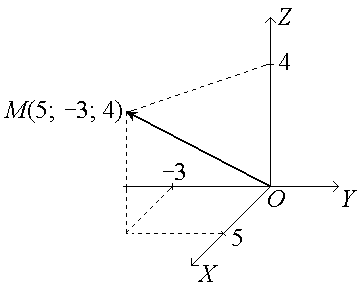
Запишем радиус-вектор :
= = (5; −3; 4) = 5 −3 + 4 .
По формуле ( 2 ) найдем его длину:
|
|
=
=
![]() =
=
![]() =
=
![]() .
.
По формулам ( 7 ) найдем направляющие косинусы:
=
![]() =
=
![]() ,
=
,
=
![]() ,
=
,
=
![]() .
.
Зная направляющие косинусы, всегда можно найти углы α, β и γ, образованные радиус-вектором с осями координат OX, OY, OZ соответственно, т.е. определить направление вектора . ■
§ 11. Понятие п – мерного вектора. Линейное пространство
Обобщим понятие вектора.
п-мерным
вектором
называется упорядоченная совокупность
п
действительных чисел, записываемых в
виде
![]() = (х1,
х2,…,
хп),
где
= (х1,
х2,…,
хп),
где
xi – i-ая компонента (координата) вектора .
Сумма двух
векторов одинаковой размерности п:
если
= (х1,
х2,…,
хп)
и
![]() = (у1,
у2,…,
уп),
то
= (у1,
у2,…,
уп),
то
![]() =
+
=
(х1
+ у1,
х2
+ у2,…,
хп
+ уп)
= (z1,
z2,…,
zп).
=
+
=
(х1
+ у1,
х2
+ у2,…,
хп
+ уп)
= (z1,
z2,…,
zп).
Произведение вектора на действительное число λ:
λ = (λх1, λх2,…, λхп).
Линейные операции над любыми векторами удовлетворяют свойствам:
10. + = + ;
20. ( + ) + = + ( + );
30. α(β ) = (αβ) ;
40. α( + ) = α + α ;
50. (α + β) = α + β ;
60. существует нулевой вектор = (0, 0,…, 0) такой, что + =
для любого вектора ;
70. для любого вектора существует противоположный вектор (− )
такой, что + (− ) = ;
80. 1∙ = для любого вектора .
Множество векторов с действительными компонентами, в котором определены операции сложения векторов и умножения вектора на число, удовлетворяющие свойствам 10 − 80, называется векторным пространством R.
Если под , , ,… рассматриваются не только векторы, но и элементы (объекты) любой природы, то такое множество элементов называют линейным пространством R.
Пример. Дано множество всевозможных пар положительных чисел:
= (х1, х2), = (у1, у2), = (z1, z2),… .
Является ли это множество линейным пространством, если сложение двух элементов определяется равенством
+ = (х1у1; х2у2),
а
умножение на действительное число −
равенством λ
= (![]() )?
)?
□ Проверим выполнение свойств 10− 80:
10. + =(х1у1; х2у2), + =( у1х1; у2х2), т.е. + = + ;
20. ( + ) + = ((х1у1)∙z1; (х2у2)∙z2) = (х1у1z1; х2у2z2),
+ ( + ) = (х1(у1z1); х2(у2z2)) = (х1у1z1; х2у2z2),
т.е. ( + ) + = + ( + );
30.
α(β
)
= α(![]() )
= (
)
= (![]() )
= (αβ)
;
)
= (αβ)
;
40. α( + ) = ((х1у1)α; (х2у2)α) = (х1αу1α; х2αу2α) = α + α ;
50.
(α
+ β)
= (![]() )
= (х1αх1β;
х2αх2β)
= α
+ β
;
)
= (х1αх1β;
х2αх2β)
= α
+ β
;
60. Нуль-элементом является пара положительных чисел = (1; 1), т.к.
+ = (х1∙1; х2∙1) = (х1; х2) = ;
70. + (− ) = ((х1; х2) + (х1−1; х2−1) = (х1∙х1−1; х2∙х2−1) = (1; 1) = .
Получили нуль-элемент = (1; 1);
80. 1∙ = (х11; х21) = (х1; х2) = .
Все свойства выполняются. Следовательно, заданное множество пар положительных чисел является линейным пространством. ■
Пусть
![]() ,
,
![]() ,…,
,…,
![]() ,
,
![]() − какие-нибудь векторы линейного
пространства R.
− какие-нибудь векторы линейного
пространства R.
Вектор , определенный равенством
= α1 + α2 + … + αт−1 ,
где
α1,
α2,…,
αт−1
− действительные числа, называется
линейной
комбинацией
векторов
![]() ,
,…,
.
,
,…,
.
Векторы , ,…, линейного пространства R называются
линейно независимыми, если из векторного равенства
α1 + α2 +…+ αт = , (1)
где α1, α2,…, αт − действительные числа, следует
α1 = α2 =… = αт = 0.
Если же равенство (1) может выполняться и в том случае, когда не все числа α1, α2,…, αт равны нулю, то говорят, что векторы , ,…,
линейно зависимы.
Очевидно, что векторы , ,…, линейно зависимы тогда и только тогда, когда один из этих векторов может быть представлен в виде линейной комбинации остальных векторов.
Пример. Являются ли векторы = (1;2) и = (3; 4) линейно независимыми.
□ Составим векторное равенство
α1 + α2 = .
Транспонируя строчные матрицы-векторы , , получим
α1![]() + α2
+ α2![]() =
=
![]() .
.
Запишем систему уравнений
![]()
Полученная система однородная. Она всегда совместная.
Если определитель системы Δ ≠ 0, то система имеет единственное решение α1 = α2 = 0 и заданные векторы линейно независимы.
Если Δ = 0, то система неопределенная (имеет бесчисленное множество решений) и заданные векторы линейно зависимы.
Составим и вычислим определитель системы:
Δ
=
![]() = 4 − 6 = −2 ≠ 0.
= 4 − 6 = −2 ≠ 0.
Значит, α1 = α2 = 0 и заданные векторы и являются линейно независимыми. ■
Замечание 1. Любые два неколлинеарных вектора на плоскости (двумерные векторы) линейно независимы.
Замечание 2. Любые три некомпланарных вектора в трехмерном пространстве (трехмерные векторы) линейно независимы.
Базис
Линейное пространство R называется п-мерным, если в нем существует п линейно независимых векторов, а любые п + 1 векторов этого пространства линейно зависимы.
Совокупность п линейно независимых векторов п-мерного пространства R называется базисом.
Теорема. Каждый вектор линейного пространства R можно представить и причем единственным способом в виде линейной комбинации векторов базиса.
Так, если
![]() ,
,
![]() ,…,
,…,
![]() − базис п-мерного
линейного пространства
− базис п-мерного
линейного пространства
R,
то любой вектор
![]() R
может быть единственным образом
представлен в виде
R
может быть единственным образом
представлен в виде
= х1 + х2 + …+ хп . (2)
Равенство (2) называют разложением вектора по базису , ,…, , а числа х1, х2,…, хп координатами вектора относительно этого базиса.
Пример.
В базисе
,
,
![]() заданы векторы
= (1; 1; 0),
заданы векторы
= (1; 1; 0),
= (1; −1; 1),
![]() = (−3; 5; −6). Показать, что векторы
,
,
= (−3; 5; −6). Показать, что векторы
,
,
образуют базис.
□ Векторы , , образуют базис, если они линейно независимы. Составим векторное равенство:
α1 + α2 + α3 = ,
которое распишем в виде
α1![]() + α2
+ α2![]() + α3
+ α3![]() =
=
![]() .
.
Получили систему
![]()
Составим и вычислим определитель системы
Δ
=
![]() = 1∙
= 1∙![]() −1∙
−1∙![]() = 1 + 3 = 4 ≠ 0.
= 1 + 3 = 4 ≠ 0.
Следовательно, α1 = α2 = α3 = 0. Отсюда следует, что векторы , ,
линейно независимые, поэтому эти векторы образуют базис. ■
Замечание 1. Любой ненулевой вектор на прямой (одномерное пространство) является базисом на этой прямой;
Два неколлинеарных вектора на плоскости (двумерное пространство), взятых в определенном порядке, являются базисом на этой плоскости;
Три некомпланарных вектора в пространстве (трехмерное пространство), взятые в определенном порядке, являются базисом в этом пространстве.
Замечание 2. Координатные орты , на плоскости и , ,
в трехмерном пространстве образуют базисы. Поэтому запись
= ах + ау и = ах + ау + az часто называют разложением вектора по координатному базису.
Переход к новому базису
Пусть в
п-мерном
линейном пространстве R
имеются два базиса: старый
,
,…,
и новый
![]() ,
,
![]() ,…,
,…,
![]() .
Пусть вектор
.
Пусть вектор
имеет координаты (х1, х2,…, хп) в старом базисе и координаты
(х1*, х2*,…, хп*) в новом базисе. Тогда, если вектор в старом базисе записывается в виде
= х1 + х2 + …+ хп ,
то в новом базисе он будет иметь вид:
= х1* + х2* + …+ хп* . (3)
После транспонирования строчных матриц-векторов , , ,…, получим систему уравнений, в которой неизвестными являются координаты (х1*, х2*,…, хп*) вектора в новом базисе , ,…, . Подставляя в (3) найденные координаты, получим выражение для вектора в новом базисе.
Пример. Вектор = (2; 3) задан в базисе , . Выразить вектор в новом базисе , , если = (1; 1), = (1; 2).
□ Вектор в новом базисе будет иметь координаты b1*, b2* , т.е.
= b1* + b2* .
Транспонируя
строчные матрицы-векторы
,
![]() ,
,
получим
,
,
получим
![]() =
b1*
=
b1*![]() + b2*
.
+ b2*
.
Составим систему
![]() .
.
Решив систему, получим
![]()
Значит, вектор в новом базисе , будет иметь вид
= + . ■