

6.22. Способы регулирования частоты вращения трехфазного асинхронного двигателя
Регулирование частоты вращения электрических асинхронных двигателей является очень важной проблемой. Основным недостатком асинхронных двигателей является ограниченная возможность регулирования частоты вращения по сравнению с двигателями постоянного тока, которые позволяют изменять частоту вращения в очень широких пределах.
В настоящее время используются следующие основные методы регулирования частоты вращения асинхронных двигателей. Изменение частоты вращения достигается:
а) изменением приложенного напряжения,
б) изменением числа пар полюсов,
в) изменением частоты питающей сети,
г) изменением сопротивления обмотки ротора,
д) введением в роторную цепь дополнительной ЭДС такой же частоты, как и частота обмотки ротора.
Последний способ достаточно сложен.
6.22.1. Изменение частоты вращения с помощью изменения числа пар полюсов
В соответствии с принципом действия асинхронных двигателей вращение магнитного поля статора определяется частотой питающей сети и числом пар полюсов в соответствии с формулой
![]() .
.
При неизменной частоте питающей сети частота вращения магнитного поля зависит от числа пар полюсов. Частота же вращения магнитного поля определяет частоту вращения ротора.
Изменение числа пар полюсов машины можно осуществить следующим образом:
а) изменением способа соединения статорной обмотки,
б) расположением на статоре двух или более независимых обмоток, обеспечивающих при их использовании различное число пар полюсов,
в) расположением на статоре обмоток, обеспечивающих возможность коммутации с целью получения различного числа пар полюсов.
Двигатели с изменяющимся числом пар полюсов изготавливаются с короткозамкнутым ротором, т. е. с обмоткой в форме беличьего колеса. Существует много методов изменения числа пар полюсов. Чаще всего используют метод коммутации статорной обмотки с целью изменения направления тока в различных частях каждой фазной обмотки.
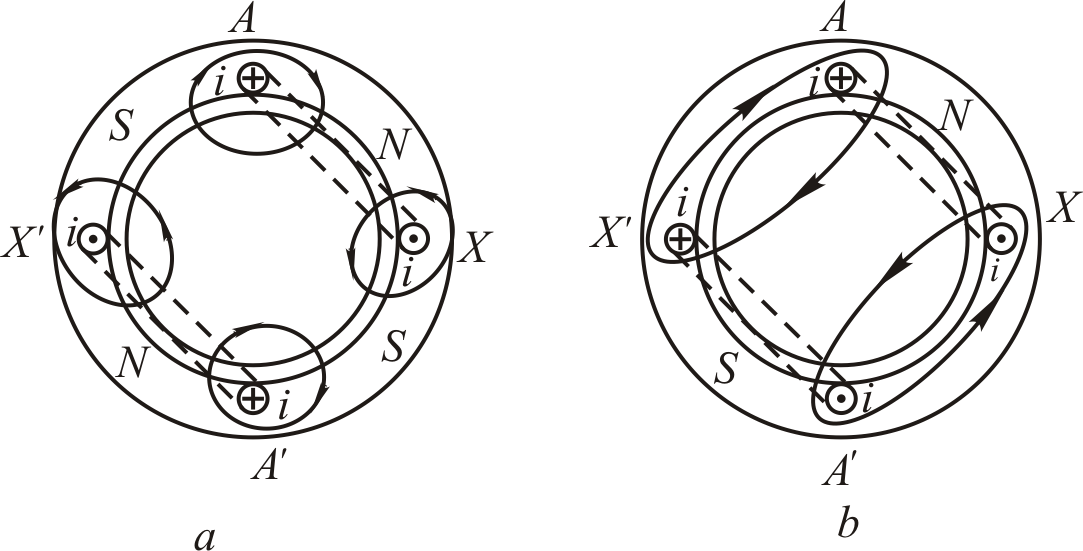
Объяснить получение различного числа пар полюсов с помощью коммутации обмотки статора можно, продемонстрировав пример двух полуобмоток (рис. 6.51).
а б
Рис. 6.51
Если
обмотка фазы
статора состоит из двух полуобмоток
и
![]() ,
то при их последовательном включении,
когда конец полуобмотки
соединен с началом полуобмотки
,
образуются две пары полюсов (направление
токов проводников обмоток и магнитные
силовые линии обмоток показаны на рис.
6.51, a).
Если изменить направление тока в одной
из обмоток (например в полуобмотке
),
то в проводниках
и
,
то при их последовательном включении,
когда конец полуобмотки
соединен с началом полуобмотки
,
образуются две пары полюсов (направление
токов проводников обмоток и магнитные
силовые линии обмоток показаны на рис.
6.51, a).
Если изменить направление тока в одной
из обмоток (например в полуобмотке
),
то в проводниках
и
![]() так же, как и в проводниках
так же, как и в проводниках
![]() и
,
токи будут протекать в одном направлении
и суммарное магнитное поле будет иметь
одну пару полюсов (рис. 6.51, б).
и
,
токи будут протекать в одном направлении
и суммарное магнитное поле будет иметь
одну пару полюсов (рис. 6.51, б).
Примеры схем коммутации статорной обмотки с целью получения различного числа пар полюсов приведены на рис. 6.52, a, б. В первом случае обмотки статора соединены треугольником. При этом обмотки каждой фазы состоят из двух полуобмоток, расположенных в статоре со сдвигом в пространстве на 180 . С помощью аппаратов управления полуобмотки каждой фазы включаются параллельно по схеме «звезда». Трехфазное напряжение при этом подводится к средней точке каждой обмотки, и направление тока в половинах каждой из фазных обмоток меняется на противоположное, обеспечивая большее количество пар полюсов.
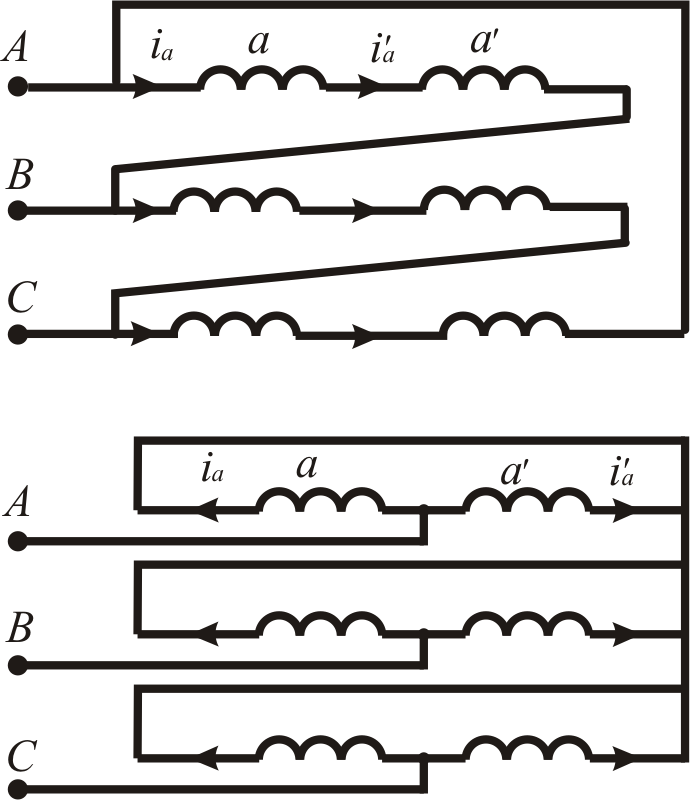
Рис. 6.52
Измерение числа пар полюсов можно получить, не изменяя схемы соединения обмотки (имеется ввиду переход от соединения «треугольник» к соединению «звезда»). На рис. 6.52 представлена схема соединения обмотки статора «звездой». Как и в предыдущем случае, фазные обмотки статора состоят из полуобмоток. Изменение направления тока в одной из полуобмоток каждой фазы приводит к увеличению числа пар полюсов и, как следствие, к изменению синхронной скорости. Следует отметить то, что изменение числа пар полюсов возможно только у двигателей, у которых выведены на клеммную панель соответствующие точки обмоток. Промышленность выпускает в основном одно- и двухскоростные двигатели.
Изменяя число пар полюсов, можно получить следующие частоты вращения магнитного поля при частоте сети 50 Гц: 3000, 1500, 1000, 750 и 500 об/мин. Изменение числа пар полюсов коммутацией обмотки статора приводит к изменению направления вращения, поэтому для сохранения направления вращения магнитного поля необходимо изменить порядок следования фаз питающей сети.