

10. Структурный анализ плоских рычажных механизмов.
При проведении теоретических и экспериментальных исследований пользуются различными расчетными схемами и моделями механизмов и машин. Они обычно отражают только те свойства механизмов и машин, которые существенно влияют на исследуемые характеристики. Так, при анализе структуры механизма используют его структурную схему; при анализе кинематики — кинематическую; динамики — динамическую. Структурная схема механизма должна содержать информацию о числе его звеньев и их взаимном расположении, виде расположении и классе (или числе подвижностей) кинематических пар.
Основные понятия структурного анализа:
Подвижность механизма – число независимых обобщенных координат, однозначно определяющее положение звеньев механизма на плоскости или в пространстве.
Связь – ограничение, наложенное на перемещение тела по данной координате.
Избыточные (пассивные) – такие связи в механизме, которые повторяют или дублируют связи, уже имеющиеся по данной координате, и поэтому не изменяющие реальной подвижности механизма. При этом расчетная подвижность механизма уменьшается, а степень его статической неопределимости увеличивается. Иногда используется иное определение: Избыточные связи – это связи, число которых в механизме определяется разностью между суммарным числом связей, наложенных кинематическими парами, и суммой степеней подвижности всех звеньев, местных подвижностей и заданной (требуемой) подвижностью механизма в целом.
Местные подвижности – подвижности механизма, которые не оказывают влияния на его функцию положения (и передаточные функции), а введены в механизм с другими целями (например, подвижность ролика в кулачковом механизме обеспечивает замену в высшей паре трения скольжения трением качения).
11. Прямая задача геометрического анализа.
Пусть задан некоторый механизм: его структура и размеры звеньев, а также входная обобщенная координата q. Целью геометрического анализа является определение зависимостей выходных параметров (например, углов поворота звеньев или координат некоторой точки) от координаты q. Зависимость выходных параметров от входных обобщенных координат механизма называется функцией положения механизма.
Определение функций положения механизма составляет прямую задачу
геометрического анализа.
При решении задачи могут быть применены метод векторных
контуров
или метод составления групповых
уравнений. Если известен закон изменения
входной координаты q1(t), то, решив прямую
задачу, можно найти законы изменения
выходных параметров

12. Решение групповых уравнений. (геометрический анализ)
Если групповые уравнения имеют решение, то оно, как правило, является
не
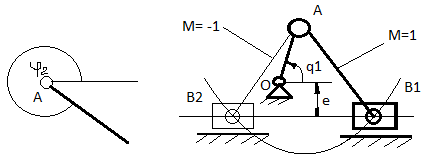
единственным. Рассмотрим пример (рис.1).
Для точки А справедливы соотношения . Для точки В получаем групповые уравнения
в виде:
. Для точки В получаем групповые уравнения
в виде:
Решаются эти уравнения так: из второго уравнения находим sinϕ2, потом находим cosϕ = ± 1- sin ϕ , подставляем в первое выражение и находим xB. Двум значениям cosϕ (положительному и отрицательному) соответствуют два значения xB и две конфигурации механизма: ползун находится либо справа от точки А, либо слева. Два решения можно найти и графически, если провести дугу окружности радиуса АВ из центра А до пересечения с линией перемещения ползуна: АВ1
и АВ2.
Таким образом, одному значению входной обобщенной координаты q1
соответствуют два решения, из которых надо оставить одно, а второе отбросить. В рассматриваемом примере это делается так: надо выбрать нужный знак косинуса угла ϕ₂. Сделать это надо один раз, и для любого положения механизма этот знак сохраняется. Механизм не может перескочить из одной конфигурации (ползун справа от точки А) в другую (ползун справа от точки А). Для того, чтобы это произошло, надо разобрать механизм, переставить звенья и собрать механизм снова.
13
14
16