

В механизме нужно определить 3 параметра: r, l и е (эксцентриситет). Зададим три входных параметра синтеза: ход рабочего звена HMAX, допустимый угол давления [α] и коэффициент производительности К. Изобразим механизм в двух крайних положениях, которые обозначим соответственно * и **. Крайнее положение механизма – такое положение, в котором функция положения рабочего звена принимает максимальное или минимальное значение. Рассматривая прямоугольные треугольники СОВ* и СОВ**, получим выражение для HMAX:
![]()
Второе
соотношение получим с учетом
эксцентриситета аналогично:![]()
Из рассмотрения косоугольного треугольника B*OB** составим третье соотношение:
![]()
Выразим неизвестный угол δ через производительность К:
![]()
Решая совместно все эти четыре уравнения, находим r, l и е.
43. Основная теорема плоского зацепления.
Основная теорема плоского зацепления сформулирована Виллисом (Теорема Виллиса). Передаточное отношение между звеньями, совершающими вращательное движение, прямопропорционально отношению угловых скоростей и обратно пропорционально отношению расстояний от центров вращения до полюса. В ней подчеркивается, что для обеспечения заданного передаточного отношения необходимо и достаточно, чтобы нормаль к профилям зубьев в контактных точках (контактная нормаль) пересекала бы в процессе зацепления профилей линию межосевого расстояния передачи все время в одной и той же точке.
В эвольвентном зацеплении контактной нормалью является линия зацепления N1N2, а точкой линии межосевого расстояния, через которую она проходит при зацеплении зубьев полюс зацепления П передачи. Следует отметить, что теорема зацепления удовлетворяется и в том случае, если профиль зубьев одного из колес выбран произвольно, а профиль зубьев парного колеса построен как сопряженный выбранному.
Следствия из теоремы Виллиса:
1.Точка профиля зуба работает только тогда, когда нормаль к профилю в ней проходит через полюс зацепления П. Обе нормали в точке Т касания профилей сливаются в одну и проходят через полюс П.
2.Нормали к профилю в его рабочей части должны пересекать начальную окружность зубчатого колеса.
3.Точки рабочего профиля работают в том порядке, в каком нормали в них проходят через полюс зацепления П.
4.Рабочие профили проскальзывают при зацеплении. Скорость скольжения профилей (внешнее зацепление):
V12 = (ω1 + ω2) ПТ
Основной теореме плоского зацепления должно удовлетворять любое плоское зацепление, предназначенное для обеспечения заданного углового передаточного отношения.
44. Основная теорема зацепления.
Для
постоянства передаточного отношения
при зацеплении двух профилей зубьев
необходимо, чтобы радиусы начальных
окружностей зубчатых колёс, перекатывающихся
друг по другу без скольжения, оставались
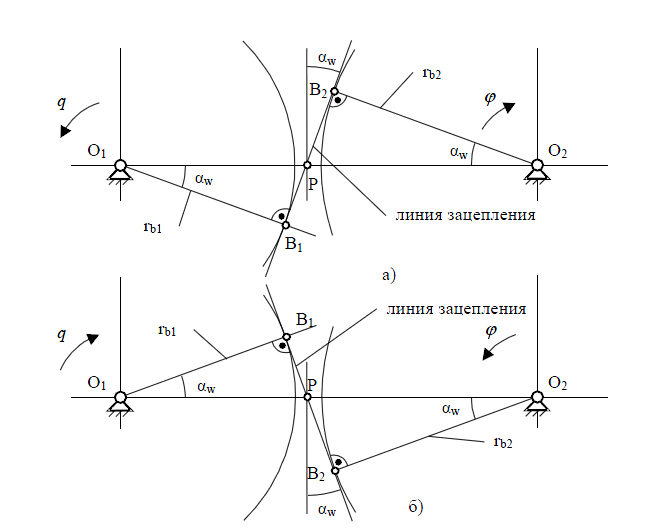
неизменными. Если рассмотреть обращённое
движение начальных окружностей, когда
всей системе задана угловая скорость
(-ω2),
то второе колесо будет условно неподвижным
и точка Р является мгновенным центром
относительного вращения колёс (рис..а).
Эта точка, называемая полюсом зацепления,
где контактируют начальные окружности,
делит межцентровое расстояние на
отрезки, обратно пропорциональные
угловым скоростям,т.к.![]() Рассмотрим
обращённое движение профилей зубьев
зубчатых колёс (рис. б)
Рассмотрим
обращённое движение профилей зубьев
зубчатых колёс (рис. б)
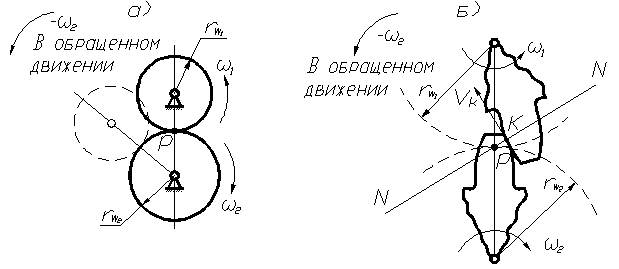
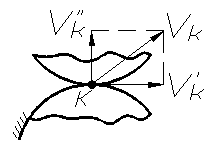
Точка
контакта зубьев (точка к), принадлежащая
первому колесу, вращается вокруг точки
Р, которая будет мгновенным центром
скоростей. Скорость
![]() и совпадает с общей касательной к
профилям в точке к при условии постоянства
этого контакта.
и совпадает с общей касательной к
профилям в точке к при условии постоянства
этого контакта.
45. Условия существования зубчатой передачи.
Зубчатые передачи осуществляют передачу вращательного движения с одного вала на другой с помощью цилиндрических, конических, червячных колёс, имеющих специально профилированные зубья.

Как объекты оптимизации зубчатые передачи имеют следующие независимые параметры: воспринимаемая нагрузка, показатели прочности и упругих свойств материалов, передаточные числа, числа ступеней и числа потоков мощности. Нагрузка является исходным ограничением, определяемым потребителем, а свойства материалов следует отнести к физическим параметрам.
Для простых одноступенчатых передач, в которых передаточное число, передаваемая нагрузка и физические свойства материалов являются исходными ограничениями, управляющих параметров просто нет. В этом случае возможные условия экстремума (предельного значения) целевых функций вырождаются в систему условий существования и качества, отражающих связи параметров.
Условия представлены в виде системы математических соотношений, определяющие:
– коэффициент высоты головки исходного контура как функцию параметров его надстройки (протуберанца);
– коэффициент смещения исходного контура шестерни как функцию приращения линии зацепления при переходе от пары с u = 1 к паре с 1< u < 3;
– коэффициент смещения исходного контура колеса из условия равенства
47. Аналитический метод синтеза сопряженных профилей.
Сопряженные поверхности – поверхности, которые постоянно или с определенной периодичностью входят в зацепление друг с другом.
Для постоянства передаточного отношения при зацеплении двух профилей зубьев необходимо, чтобы радиусы начальных окружностей зубчатых колёс, перекатывающихся друг по другу без скольжения, оставались неизменными.
Правильным положением является то, которое удовлетворяет основной теореме зацепления
максимальных толщин зубьев колеса и шестерни;
– угол наклона зубьев в плоскости зацепления из условия равнопрочности передачи по напряжениям контакта и изгиба;
– удельное скольжение как функцию числа зубьев и угла зацепления.
46. Графический метод синтеза сопряженных профилей.
Сопряженные поверхности – поверхности, которые постоянно или с определенной периодичностью входят в зацепление друг с другом.
По отношению к начальным окружностям сопряженные поверхности могут занимать различные положения. Правильным положением является то, которое удовлетворяет основной теореме зацепления, теореме о мгновенном передаточном отношении, которое формулируется:
Общая нормаль, проведенная в точке контакта сопряженных поверхностей, проходит через линию центров О1О2 и делит эту линию на части, обратно пропорциональные отношению угловых скоростей.
Передаточное отношение
Сопряженные профили должны удовлетворять следующим требованиям:
1. Быть простыми в изготовлении (технологичными);
2. Иметь высокий КПД.
Графические методы:
1. Метод построения сопряжённого профиля по положениям нормалей (способ Релю). Данный метод основан на основной теореме зацепления и используется в тех случаях, когда можно легко определить положение нормалей к заданному профилю П.
2. Метод последовательных положений профиля. Определение сопряжённого профиля П2 по заданному профилю П1 методом последовательных положений заключается в обращении движения центроиды Ц1 относительно неподвижной центроиды Ц2, вычерчивании ряда положений профиля П1 и построении к ним огибающей кривой, которая является искомым профилем П2.
48. Свойства эвольвенты окружности и эвольвентного зацепления.
В качестве главного профиля зубьев цилиндрических зубчатых колес, применяемых в машиностроении, наибольшее распространение получил эвольвентный профиль. Плоская эвольвента окружности представляет собой траекторию любой точки прямой линии, перекатываемой без скольжения по эволюте, т.е. по основной окружности радиуса rb (рис. 20.1).
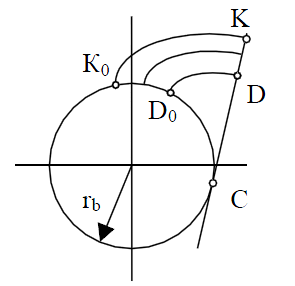
Перекатываемая по основной окружности прямая называется производящей прямой.
Рассмотрим более подробно свойства эвольвенты окружности.
1. Нормаль к эвольвентам (прямая КС) касается основной окружности, причем точка касания (С) является центром кривизны эвольвент.
2. Все эвольвенты одной основной окружности эквидистантны, и расстояние KD между ними равно длине дуги К0D0.
3. Каждая ветвь эвольвенты вполне определяется радиусом основной окружности и положением начала отсчета эвольвентного угла.
4. Эвольвента не имеет точек внутри основной окружности.
Из свойств эвольвенты вытекают свойства эвольвентного зацепления. Пусть профиль зуба колеса 1 (рис. 20.2) очерчен по эвольвенте основной окружности с радиусом rb1, а профиль зуба колеса 2 – по эвольвенте основной окружности радиуса rb2.
Поместим центры этих окружностей в центры вращения 01 и 02. Нормаль к эвольвенте первого колеса должна быть касательной к основной окружности первого колеса, а нормаль к эвольвенте второго колеса должна быть касательной к основной окружности второго колеса. В точке касания эвольвент нормаль должна быть общей к обоим профилям, и, следовательно, точка контакта лежит на общей касательной к основным окружностям. При вращении ведущего колеса 1 против часовой стрелки, а ведомого колеса 2 – по часовой (рис. 20.2, а) точка касания эвольвент перемещается по отрезку В1В2 этой касательной, т.к. вне отрезка В1В2 эвольвенты не могут касаться, т.е. иметь общую нормаль; В1В2 является линией зацепления. Точка пересечения общей нормали к эвольвентам с линией межосевого расстояния 0102 является полюсом зацепления Р и занимает неизменное положение. Если направление вращения ведущего колеса 1 и ведомого колеса 2 изменится, то линия зацепления В1В2, по которой перемещается точка контакта, займет новое положение (рис. 20.2, б).
Угол между линией зацепления В1В2 и прямой, перпендикулярной линии
межосевого
расстояния, называется углом зацепления
и обозначается через w. Углы Р01В1 и Р02В2
равны углу зацепления w как углы с
соответственно перпендикулярными
сторонами. Поскольку Р01 = rw1, а Р02 = rw2, то
![]() (20.1)
(20.1)
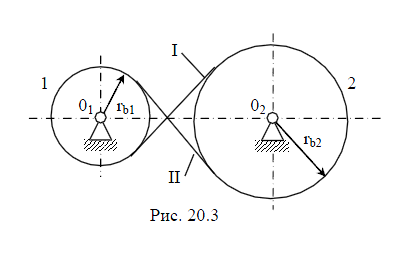
Свойства эвольвентного зацепления иллюстрирует аналогия с перекрестно ременной передачей (рис. 20.3). Линия зацепления как бы сматывается с ведущего шкива 1 радиуса rb1 и наматывается на шкив 2 радиуса rb2. (ветвь I при вращении
ведущего шкива 1 против часовой стрелки и ветвь II при вращении шкива 1 по часовой стрелке. При изменении межосевого расстояния 0102 передаточное отношение, обратно пропорциональное отношению радиусов шкивов rb2 и rb1, не изменяется.