

3. Механизм и его элементы.
Определяя механизм, будем использовать следующие понятия:
Звено - твердое тело или система жестко связанных тел, входящих в состав механизма.
Кинематическая цепь - система звеньев, образующих между собой кинематические пары.
Кинематическая пара - подвижное соединение двух звеньев, допускающее их определенное относительное движение.
Стойка - звено, которое при исследовании механизма принимается за неподвижное.
Число степеней свободы или подвижность механизма - число независимых обобщенных координат, однозначно определяющих положение всех его звеньев на плоскости или в пространстве.
Несвободная система - система материальных тел (точек), положения и движения которых подчинены некоторым геометрическим или кинематическим ограничениям, заданным наперед и не зависящим от начальных условий и заданных сил. Эти ограничения, наложенные на систему и делающие ее несвободной, называются связями. Положения точек системы, допускаемые наложенными на нее связями, называются возможными. Обобщенные координаты системы - независимые друг от друга величины q1,q2, ... qn, вполне и однозначно определяющие возможные положения системы в произвольный момент времени.
Механизм - система, состоящая из звеньев и кинематических пар, образующих замкнутые или разомкнутые цепи, которая предназначена для передачи и преобразования перемещений входных звеньев и приложенных к ним сил в требуемые перемещения и силы на выходных звеньях.
Входные звенья - звенья, которым сообщается заданное движение и соответствующие силовые факторы (силы или моменты); выходные звенья - те, на которых получают требуемое движение и силы.
Начальное звено - звено, координата которого принята за обобщенную. Начальная кинематическая пара - пара, относительное положение звеньев в которой принято за обобщенную координату.
4. Структура машины и ее функциональные части.
В машине можно выделить несколько основных функциональных частей.
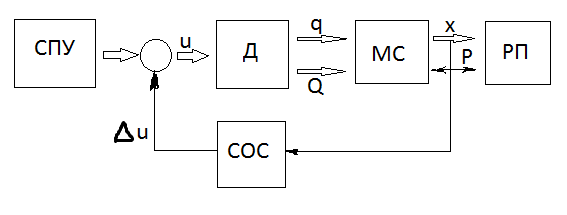
Основную часть машины составляет исполнительный механизм, который совершает тот рабочий процесс, ради которого создавалась машина. Вместе со вспомогательными механизмами (например, редуктором, мультипликатором, коробкой скоростей и т.п.) он составляет механическую систему машины (МС). Входу (входному звену) сообщается движение, определяемое некоторой обобщенной координатой q. Механическая система
преобразует это движение в требуемое движение выходного (рабочего) звена, определяемое выходной координатой х. К входному звену приложена обобщенная движущая сила Q, которая преобразуется в МС в силу Р на выходном звене. При решении первой задачи динамики оказывается, что необходимо включить в рассматриваемую модель и рабочий процесс (РП), который также можно считать частью машины. МС совершает рабочий процесс с помощью силы P, действующей на выходном звене.
Неотъемлемой частью машины является двигатель (Д), который сообщает механической системе МС движение и в котором создается обобщенная движущая сила Q. Модель двигателя включается в рассмотрение при решении второй задача динамики – определении закона движения при заданных силах. Современные машины снабжаются системами программного управления (СПУ), которые формируют управляющие сигналы u, поступающие на вход двигателя. Для корректировки движения используется система обратной связи (СОС). Она получает информацию о движении выходного звена МС и формирует корректирующий сигнал Du, уменьшающий возникающую ошибку.
5. Строение механизмов. Основные определения.
Звено - твердое тело или система жестко связанных тел, входящих в состав механизма.
Стойка - звено, которое при исследовании механизма принимается за неподвижное.
Звено, совершающее 2 вращение вокруг неподвижной оси, называется кривошипом. Если звено совершает качательное движение (неполный оборот), то его называют коромыслом. Звено, совершающее возвратно-поступательное движение, - ползун. Звено, совершающее плоское движение - шатун.
Кинематическая пара - подвижное соединение двух звеньев, допускающее их определенное относительное движение.
Элементы кинематических пар считаются недеформируемыми, а связи, накладываемые кинематической парой, являются голономными, стационарными и удерживающими. Важной характеристикой КП является число степеней свободы s, которое оставляет КП в относительном движении соединяемых ею звеньев. Например, если КП оставляет одну степень свободы в относительном движении (s=1), то такую пару называют одноподвижной. Двухподвижная пара оставляет две степени свободы в относительном движении (s=2).
Низшие кинематические пары – те, в которых контакт звеньев осуществляется по плоскости или поверхности. Если у двух звеньев, входящих в пару, можно построить общие поверхности, то такие пары называют низшими (например, во вращательной паре можно построить общий цилиндр, а в поступательной – общую плоскость). В противном случае пару называют высшей: при каждом положении звеньев имеются только общие линии или точки, расположение которых меняется в процессе движения. Высшей кинематической парой моделируется, например, соединение двух зубчатых колес между собой.
Соединив некоторое число звеньев между собой с помощью КП, получим модель, обладающую новыми свойствами – кинематическую цепь. Кинематическая цепь – совокупность звеньев, связанных между собой